一种电动助力自行车整车电控系统骑行效果测试评价系统的制作方法
1.本发明涉及测试评价系统技术领域,具体为一种电动助力自行车整车电控系统骑行效果测试评价系统。
背景技术:
2.电助自行车一般不具有纯电力骑行模式,而是必须采用“人力+电力”的混合动力驱动,在骑行方式上则与普通自行车完全一样,但是电机助力让骑行更加省力,因此可作为短程通勤和休闲代步的工具,也将是未来个人短程出行的新工具,越来越受到人们的欢迎。
3.但是市面上现有的电动助力自行车种类很多,主要分为力矩型和速度型助力系统,整个整车的骑行效果没有量化的考核标准,都是靠人主观骑行来评价助力效果,很不科学,因此市场需要一精确套数字化的评价系统来给整车的助力效果进行等级分类。
技术实现要素:
4.本发明的目的在于提供一种电动助力自行车整车电控系统骑行效果测试评价系统,以解决上述背景技术中提出的现有的自行车骑行效果没有量化的考核标准,都是靠人主观骑行来评价助理效果,很不科学的问题。
5.为实现上述目的,本发明提供如下技术方案:一种电动助力自行车整车电控系统骑行效果测试评价系统,该电动助力自行车整车电控系统骑行效果测试评价系统的具体步骤如下:
6.步骤一:基于行驶工况对电动助力自行车电控系统进行台架实际测试,以确定评价指标体系;
7.步骤二:确定隶属函数μ(x);
8.步骤三:根据权重系数确定评价模型;
9.(1)确定评价指标,并根据评价指标建立描述系统特征的内部独立的递阶层次结构模型;
10.(2)比较任意两个指标以构造判断矩阵,并通过所述判断矩阵确定两个指标之间的重要性和重要程度;假设有n个评价指标,则可得到两两判断矩阵a;
[0011][0012]
其中ann为任意两个评价指标之间比较得出哪个重要及重要程度;
[0013]
(3)计算评价指标的相对权重;
[0014]
步骤四:针对评价模型进行模糊多属性决策;
[0015]
步骤五:进行车用电机驱动系统综合性能评价。
[0016]
优选的,先通过模糊指标值与权重的合成运算,求出方案的模糊效用集,并定义诸模糊效用集中的模糊理想解与模糊负理想解作为决策的参照基准,通过比较各模糊效用集与参照基准间的距离,确定方案与模糊理想解的相对贴近度,选择其中最佳方案。
[0017]
优选的,所述模糊合成算子通过以下方法确定,通过乘法运算进行模糊矩阵修正,通过去大和有界和运算,对修正后的模糊矩阵综合。
[0018]
与现有技术相比,本发明的有益效果是:
[0019]
本控制算法解决力矩型电动助力自行车的紫铜评价问题,克服了主观骑车的认知,另一方面也更有效的抓取客户的精准需求,商家可以实现精准投放,克服了缺点、增加了功能、降低了成本、简化了结构、易于制造、故障率低、安全可靠、节能环保、便于操作。
附图说明
[0020]
图1为力矩型电动助力自行车无刷直流控制模型;
[0021]
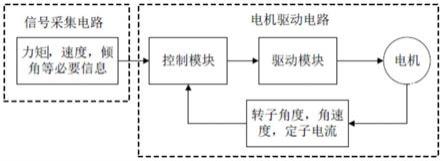
图2为电动助力自行车电控系统综合性能模块图。
具体实施方式
[0022]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0023]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0024]
实施例:
[0025]
请参阅图1
‑
2,本发明提供一种技术方案:一种电动助力自行车整车电控系统骑行效果测试评价系统,该电动助力自行车整车电控系统骑行效果测试评价系统的具体步骤如下:
[0026]
步骤一:基于行驶工况对电动助力自行车电控系统进行台架实际测试,以确定评价指标体系;
[0027]
步骤二:确定隶属函数μ(x);
[0028]
步骤三:根据权重系数确定评价模型;
[0029]
(1)确定评价指标,并根据评价指标建立描述系统特征的内部独立的递阶层次结构模型;
[0030]
(2)比较任意两个指标以构造判断矩阵,并通过所述判断矩阵确定两个指标之间的重要性和重要程度;假设有n个评价指标,则可得到两两判断矩阵a;
[0031][0032]
其中ann为任意两个评价指标之间比较得出哪个重要及重要程度;
[0033]
(3)计算评价指标的相对权重;
[0034]
步骤四:针对评价模型进行模糊多属性决策;
[0035]
步骤五:进行车用电机驱动系统综合性能评价。
[0036]
先通过模糊指标值与权重的合成运算,求出方案的模糊效用集,并定义诸模糊效用集中的模糊理想解与模糊负理想解作为决策的参照基准,通过比较各模糊效用集与参照基准间的距离,确定方案与模糊理想解的相对贴近度,选择其中最佳方案;
[0037]
给定一个方案集a={a1,a2....am}和相应于每个方案的属性集c={c1,c2,....cn},以及每个属性相对重要程度的权重w={w1,w2....wn};
[0038]
则其模糊指标矩阵可以写成:
[0039][0040]
其中与第m个备选方案中,第n个评价指标通过该指标的隶属函数得到的模糊值:采用广义模糊合成算子对权重矢量w和模糊指标矩阵实行变换,得到模糊决策矢量
[0041]
所述模糊合成算子通过以下方法确定,通过乘法运算进行模糊矩阵修正,通过去大和有界和运算,对修正后的模糊矩阵综合,具体模糊矩阵方案见下:
[0042]
第一种方案:采用灰关联度来度量模糊集之间的接近程度:
[0043]
即设x0={x0(k)/k=1,2,3...m}为参考序列,即系统特征序列;
[0044]
xi={xi(k)/k=1,2...m}(i=1,2,...n)为比较序列,
[0045][0046]
式中:为两级最小差;为两级最大差;p为分辨系数:
[0047]
则比较序列xi对参数序列x0的灰关联度为
[0048]
利用折衷多属性决策计算评价方案灰色关联度,具体包括:以理想解m
+
和m
—
为参考序列,方案ai与理想解m
+
的关联度越大,方案越佳;与理想解m
—
关联度越小,方案越佳。
[0049]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或
基本特征的情况下,能够以其他的具体形式实现本发明;因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0050]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1