基于改进博奇编码和数据区间映射的高鲁棒全息盲水印算法
1.本发明属于计算机全息技术、信息安全、版权保护的技术领域,尤其涉及一种基于改进博奇编码和数据区间映射的高鲁棒全息盲水印算法。
背景技术:
2.随着网络技术与计算机技术的迅速普及,人们获取信息(取图像、音频、视频)的渠道更加便捷,为信息传输和存储提供了更丰富的载体。但是,数字媒体的易传播性和便捷性,也常常出现数字信息被盗用和侵权等现象。同时,人们对信息的需求与版权保护意识的日益增强。因此,对数字图像的版权保护进行研究具有重要的意义。
3.现有数字水印技术主要分为三大类鲁棒水印[roop singh,alaknanda ashok,mukesh saraswat.optimised robust watermarking technique using ckgsa in dct
‑
svd domain.2020,14(10):2052
‑
2063.]、盲水印[soumitra roy,arup kumar pal.a blind dct based color watermarking algorithm for embedding multiple watermarks.2017,72:149
‑
161.]和零水印[温泉,孙锬锋,王树勋.零水印的概念与应用[j].电子学报,2003(02):214
‑
216.]。鲁棒水印基本思想是将版权信息的部分信息(如最大奇异值)嵌入载体图像的不可见域,对于常规的攻击具有很好的鲁棒性,但在认证阶段需要提供部分水印信息才能提取完整的版权水印。零水印技术则是通过载体图像的特征信息与版权水印进行异或运算生成具有唯一性的零水印信息,在发生版权纠纷时,再将零水印用于提取版权信息。为解决鲁棒水印认证繁琐问题,soumitra等人提出一种盲水印算法,将版权信息通过量化的方式将版权信息全部嵌入载体图像中,对于图像常规操作具有很好的鲁棒性,且在认证过程中不需要提供原始版权信息的任何信息,实现了盲提取过程。由于盲水印技术可以将版权信息全部嵌入载体图像中,且在认证过程中不需要原始版权的任何信息,因此,被广泛的应用于数字信息的版权保护。如文献[guo q,chen g x,luo j,et al.a blind watermarking algorithm using dwt and dct techniques for color image[j].applied mechanics and materials,2015,731:179
‑
182.]结合dwt和dct将水印信息嵌入载体图像的中频子块中,先是将彩色图像转换成lab空间,然后再对l分量进行dwt得到中频系数,并对中频系数进行分块,最后将水印信息嵌入子块的dct系数中。由于dct系数对图像旋转较为敏感,因此,对于旋转攻击鲁棒性能较差。因此文献[soumitra roy,arup kumar pal.a blind dct based color watermarking algorithm for embedding multiple watermarks.2017,72:149
‑
161.]在彩色图像的蓝色分量和绿色分量中嵌入多重水印,并用重复码替换中频块的dct系数,以提高算法的鲁棒性能。在水印嵌入dct系数中,虽然能够很好的保护透明性和提高鲁棒性,但由于图像几何位置发生改变时,dct系数变化较大,因此对于几何攻击鲁棒性较差。
[0004]
为此,文献[araghi t k,manaf a a,araghi s k.a secure blind discrete wavelet transform based watermarking scheme using two
‑
level singular value decomposition[j].expert systems with applications,2018,112(dec.):208
‑
228.]和
文献[xu h,kang x,wang y,et al.exploring robust and blind watermarking approach of colour images in dwt
‑
dct
‑
svd domain for copyright protection[j].international journal of electronic security and digital forensics,2018,10(1):79
‑
96.]对图像的每一个子块的dwt高频信息进行奇异值分解,并将水印信息嵌入载体图像子块的奇异值矩阵中。奇异值分解具有旋转不变性和稳定性,对鲁棒性能具有很大的提升。奇异值分解虽然解决了dct能量敏感性问题,但由于将水印嵌入子块的最大奇异值,因此对于剪切攻击提取的水印图像常常出现局部缺失现象。文献[a r t,b a k,c d t.hybrid and blind watermarking scheme in dcut
–
rdwt domain[j].journal of information security and applications,2019,46:231
‑
249.]和文献[[1]郭鹏飞,冯琳,孙思宇.新式灰度图像盲检测数字水印算法[j].计算机工程与科学,2019,41(01):104
‑
112.]先是将载体图像进行冗余离散小波变换rdwt,提取载体图像的逼近低频域,然后再将低频信息进行分块,并对每一子块进行schur分解,通过修改上三角矩阵的最大能量值,完成水印信息的嵌入。由于rdwt的时间平移不变性和schur分解的抗抖动性,使得算法对于几何攻击表现出强的鲁棒性。文献[qiao l y,kim j w.a zero
‑
watermarking scheme based on lpm and holographic[j].international journal of security and its applications,2014,8(6):89
‑
100.]通过全息技术和极坐标变换生成载体图像的全息图,由于全息图具有不可撕毁的特点,因此生成零水印能够抵抗大幅度的旋转攻击,但在剪切攻击方面鲁棒性较差。文献[yu c,li x,chen x,li j.an adaptive and secure holographic image watermarking scheme.entropy.2019;21(5):460]提出一种二进制全息加密算法用于生成全息水印图,并通过计算熵和边缘熵来自适应选择嵌入位置,最后通过schur分解将全息图像嵌入载体图像的低频域。全息加密算法具有较大的加密空间,有利于提高信息的安全性,而使用边缘熵可以很好地平衡鲁棒性与透明性。对于滤波攻击、jpeg压缩、模糊操作、图像遮挡表现出强的鲁棒性,但在噪声攻击下提取的版权水印含噪声点较多。
[0005]
在传统的盲水印算法中,对于剪切攻击和旋转攻击抵抗性能较差,且提取的版权水印出现缺失现象,主要在于盲水印嵌入过程中,采用量化方式嵌入整体载体图像,虽然在透明性和鲁棒性有所提高,但当图像几何像素发生变化时,在原始位置上就很难提取完整的版权水印。目前盲水印方法还存在以下不足:
[0006]
(1)现有的盲水印算法无法抵抗大角度的剪切攻击和旋转攻击,在提取版权图像时含噪声点较多。
[0007]
(2)现有的盲大都使用单一的加密方法对版权信息进行置乱,安全性较多,密钥空间小。
技术实现要素:
[0008]
基于以上现有技术的数字水印的不足,本发明所解决的技术问题在于提供一种基于改进博奇编码和数据区间映射的高鲁棒全息盲水印算法,盲水印克服零水印认证过程虚警率问题,全息技术解决了盲水印对于剪切攻击鲁棒性差的问题,能够实现对数字信息的版权保护。
[0009]
本发明的基于改进博奇编码和数据区间映射的高鲁棒全息盲水印算法,包括版权
水印嵌入和版权认证:
[0010]
版权水印嵌入包括如下步骤:
[0011]
1.1设h为彩色载体图像,大小为m
×
n
×
3,w为水印图像,大小为p
×
q,将水印图像w进行全息加密,将大小为p
×
q的二值版权图像进行傅里叶全息加密,并对傅里叶全息图像进行改进的burch编码,得到尺寸为2p
×
2q的全息图bw;
[0012]
1.2全息图像预处理,将得到的全息图像bw进行数据区间映射,得到图像bw1;
[0013]
1.3将rgb载体图像h转换到yuv颜色空间,得到h
y
、h
u
、h
v
三个分量,并对亮度分量h
y
进行两次小波分解,得到尺寸为低频系数ll;
[0014]
1.4对低频系数ll进行4
×
4不重叠分块,每个子块记为b
i,j
,并对每个子块进行schur分解,得到酉矩阵u
i,j
和上三角矩阵t
i,j
;
[0015]
1.5在上三角矩阵t
i,j
中嵌入预处理之后的全息图bw1中的元素;
[0016]
1.6对嵌入水印信息后的t'
i,j
(1,1)进行逆schur变换和逆小波变换,得到嵌入信息后的亮度分量h'
y
,并根据步骤1.3中得到的u分量h
u
和v分量h
v
,变换到rgb颜色空间,得到嵌入水印的载体图像h';
[0017]
版权认证包括如下步骤:
[0018]
2.1对受攻击之后的载体图像h'
att
提取surf特征点,将k1密钥中的特征点和载体图像h'
att
特征点匹配,选择三对不重合且不共线的匹配点,生成仿射矩阵,对载体图h'
att
进行仿射变换得到矫正后载体图h”att
;
[0019]
2.2将rgb颜色空间的彩色图像h”att
变换到yuv颜色空间,取其中的亮度分量y
att
进行两次小波变换,取变换后的低频系数ll';
[0020]
2.3对低频系数ll'进行不重叠的4
×
4分块,对得到的子块b'
i,j
,并依次进行schur矩阵分解,得到上三角矩阵t”i,j
;
[0021]
2.4取上三角矩阵t”i,j
第一行第一列的元素t”i,j
(1,1),提取水印信息;
[0022]
2.5对全息编码矩阵bw'进行区间逆映射,并进行全息再现过程,得到二值水印图像w'。
[0023]
可选的,在步骤1.5中,嵌入方法如下:
[0024][0025]
其中δ=mod(t
i,j
(1,1),q),mod是取模运算,t
i,j
(1,1)为上三角矩阵t
i,j
第一行第一列元素,q为水印嵌入强度。
[0026]
可选的,在步骤2.4中,提取水印信息如下:
[0027][0028]
其中δ'=mod(t”i,j
(1,1),q),mod是取模运算,t”i,j
(1,1)为上三角矩阵t”i,j
第一行第一列元素,q为水印嵌入强度,bw'为提取得到的全息编码矩阵。
[0029]
由上,本发明的基于改进博奇编码和数据区间映射的高鲁棒全息盲水印算法根据计算全息的原理和特点,在空域扩展待编码图像的范围,运用改进的burch编码算法对水印进行加密,并生成全息水印图像。将全息水印图像进行区间映射,将[0,1]区间的随机离散的小数压缩成4个数值,保留数据的基础上嵌入了更少的信息。将压缩后的数值进行数据区间映射,进一步提升了图像水印系统的安全性。其次,将rgb彩色载体图像转换到yuv色彩空间,选取y分量进行二级离散小波变换,对低频分量进行分块,并对每个子块进行schur分解。最后,选取上三角矩阵的第一行第一列作为全息水印嵌入的位置,动态选择合适的嵌入强度。将嵌入水印信息的上三角矩阵进行schur重构,小波逆变换,并将yuv空间转成rgb颜色空间得到含水印信息的图像。
[0030]
另外,本发明选择改进博奇编码对版权水印进行全息加密,并利用基于正态分布的区间映射减少嵌入的信息量,进而保证提取全息信息的精度。可选择yuv空间、hsv空间和lab空间作为构造彩色零水印的三个基本颜色空间,并选择dwt作为图像频域变换工具,来获得载体图像的低频域信息,schur分解用于提取载体图像的最大特征值,并动态选择嵌入强度;在常规攻击下,本发明表现出较强的鲁棒性和稳定性。与现有技术相比,本发明的有益效果如下:
[0031]
(1)利用改进博奇编码生成全息图像,可以解决传统全息技术的孪生像重叠问题,同时将全息图像作为水印信息可以有效抵抗剪切攻击对水印图像的影响。
[0032]
(2)基于正态分布的区间映射可以减少嵌入的信息量,进而保证载体图像的透明性和鲁棒性。
[0033]
(3)利用schur分解,可以提高每一子块抗几何攻击的鲁棒性以及矩阵分解的速度。
[0034]
(4)全息盲水印可以改善传统盲水印的安全性,并解决在尺度攻击下鲁棒性差的问题。
[0035]
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下结合优选实施例,并配合附图,详细说明如下。
附图说明
[0036]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例的附图作简单地介绍。
[0037]
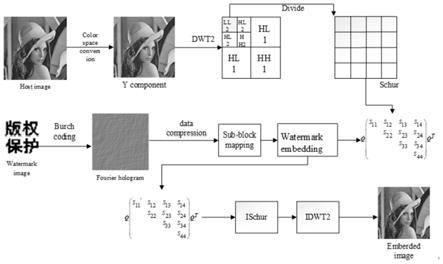
图1是版权水印嵌入过程图;
[0038]
图2是版权认证过程图。
具体实施方式
[0039]
下面结合附图详细说明本发明的具体实施方式,其作为本说明书的一部分,通过实施例来说明本发明的原理,本发明的其他方面、特征及其优点通过该详细说明将会变得一目了然。在所参照的附图中,不同的图中相同或相似的部件使用相同的附图标号来表示。
[0040]
数字全息技术是利用计算机编码以及数值计算等方法生成的全息图像,全息图像记录了图像的振幅和相位的全部信息,并且图谱具有不可撕毁,局部可恢复全局的特性,所以对全息图像的任一部分进行裁剪攻击,都具有一定的抵抗作用。因此,利用全息技术对水印图像进行全息加密,生成的全息图像具有安全性和抗剪切的特性。本发明改进博奇编码,将原始图像的像素点镶嵌到比原始图像大四倍的全零矩阵中,来实现原始图像与共轭图像的分离。具体步骤如下:
[0041]
step1:扩展编码。由于傅里叶全息编码的计算全息图像恢复后存在孪生像之间的混叠,为了实现全息图像的共轭分离,对博奇编码进行改进。先将原图像的像素点写入一个像素值大于原图像的全零矩阵中,达到离轴的效果。然后通过全息再现光学系统,得到准确的离轴图像,当全零矩阵为原图像四倍时,原始图像与共轭图像可完全分离。设原始图像o(x,y)的像素数为m
×
n,以原点坐标为图像中心,扩大o(x,y)的编码范围,将o(x,y)写到像素为2m
×
2n的全零矩阵中,得到待编码图像o1(x,y),用矩阵表示为
[0042][0043]
step2:全息加密。将o1(x,y)通过物光波和参考光波的干涉,在光学离轴全息面上得到全息图像函数h(u,v)
[0044][0045]
其中,o1(u,v)表示物光波;a(u,v)表示物光波的复振幅;r(u,v)表示离轴平面参考光波;j2παx是物光波,参考光波的空间频率α=sinθ/λ,λ为参考光波波长,是参考光波的相位信息。按照博奇编码的方法,构成新的全息函数,即
[0046][0047]
式中k为常数,使得对于所有u,v,h(u,v)均为非负的实数。
[0048]
将编码扩展的图像o1(x,y)在水平的光照射下,经过透镜作傅里叶变换,得到全息图像h(u,v)。在平行光的照射下,然后经过后焦面上得到经过傅里叶逆变换的全息再现图像g(ξ,η)。
[0049]
step3:解密过程,对编码后的全息图h(u,v)做傅里叶逆变换,可得到全息再现图像g(ξ,η)。
[0050]
g(ξ,η)=ifft(h(u,v))
[0051]
其中g(ξ,η)的像素大小为m'
×
n',坐标范围解码后全息图g(ξ,η)实现了孪生像的共轭分离,分别由0
‑
1矩阵δ(ξ,η)、原始像o和共轭像o'三部分组成。
[0052]
g(ξ,η)=kδ(ξ,η)+o1(ξ
‑
α,η)+o1[
‑
(ξ+η),η]
[0053]
其中
[0054][0055][0056][0057]
因此,经过上述改进博奇编码后生成的全息图不会出现孪生像之间的混叠。
[0058]
本发明结合所提出的基于改进buch编码的离轴傅里叶全息技术对版权图像进行处理,以提高水印信息的安全性和鲁棒性。经过改进burch编码的傅里叶全息图像是由[0,1]的不连续的随机分布的数值构成,欲将全息图像作为水印信息直接嵌入到载体图像中,面临着嵌入的信息量过多,无法保证提取精度的问题。为了解决这一问题,本发明提出一种基于正态分布的数据阈值压缩算法。
[0059]
step1:正态拟合。根据全息矩阵中数据值的分布以及出现的频次,通过计算数据的均值和标准差可以拟合出正态分布。数据分布x服从位置参数μ,尺度参数为σ的概率分布,下式为数据分布的概率密度函数。
[0060][0061]
其中,μ为均值,σ为标准差。
[0062]
f(x)关于x=μ点对称,并且在x=μ达到极大。由概率密度函数的性质可知,f(x)在μ点附近数值出现频次较多,则随机变量x在μ点附近取值的概率也就越大,对任意服从正态分布n(μ,σ2)的随机变量都有。
[0063]
p(μ
‑
σ≤x≤μ+σ)≈0.688
[0064]
p(μ
‑
2σ≤x≤μ+2σ)≈0.955
[0065]
p(μ
‑
3σ≤x≤μ+3σ)≈0.997
[0066]
由上式可知,随机变量的取值在[μ
‑
σ,μ+σ]之间的概率超过2/3,在[μ
‑
2σ,μ+2σ]中的概率可达0.955,所以认为在这个范围取值,基本上不会发生信息丢失。
[0067]
step2:参数选择。为了尽可能的保留全息图像嵌入载体图像的信息,并嵌入更少的信息位,在嵌入信息之前对进行信息位压缩。选择嵌入的区间范围为[μ
‑
βσ,μ+βσ](0.9<β<2.1),参数β在区间[0.9,2.1]上取值(数据落在该区域的概率大),以步长为0.01递增,以三种等分区间的取点方式,对全息水印进行数据压缩,使压缩编码后的全息矩阵中仅仅具有2个、3个或4个数值。
[0068]
经实验验证,将全息矩阵压缩到4个数值时,在参数β略大于1.92处,全息恢复的nc值可以达到局部最优。对参数β进行进一步优化,在区间[1.92,1.93]中,以步长为0.0001递增。β∈[1.9204,1.9217]时,当选取4个值作为信息嵌入时,可完美恢复,即nc值为1.0000。
[0069]
step3:数据压缩。β∈[1.9204,1.9217]时,将[μ
‑
βσ,μ+βσ]进行五等分,将区间分割点作为压缩值,使用压缩值替换全息矩阵中数值,替换方式如下式所示。其中a1~a4为4个分界点对应的数值,全息图像矩阵的数据将由分界点的四个数据值构成,实现数据的压缩。数据压缩方式如下所示。
[0070][0071]
step4:数据映射。对整个区间进行数据压缩后,进行数据值映射,将不方便计算和读取的小数值,进行一一映射,每一组映射都由原始数值和映射数值组成,此操作不仅对水印信息进一步加密,同时也节约了计算时间,在不知映射关系的前提下,无法将提取出的信息恢复成水印图像。在映射过程中,将a1映射成1,a2映射成2,a3映射成3,a4映射成4。在全息恢复,提取图像时,再进行反向映射。当一位数据映射出错,便无法正确恢复出全息图像,进一步增加了水印信息的安全性。
[0072]
将二次分块后的子块进行schur分解,并提取每一子块的奇异值,用于构造成载体图像的特征矩阵,提高载体图像受攻击后的鲁棒性,schur分解可以表示为三个矩阵的乘积,分解方式如下式所示:
[0073]
i=quq'
[0074]
其中u为上三角矩阵,q为酉矩阵,q’为q的转置矩阵。
[0075]
本发明采用归一化相关系数(normalization correlation,nc值)衡量提取水印与原始水印之间的相似度,计算方法分别如下式所示:
[0076][0077]
其中w,w'分别表示原始水印和提取的水印,其中nc∈[0,1],当nc=1,表明两个水
印图像的完全相同,当nc=0,则表明两个水印不相关。
[0078]
为了客观的评价算法的性能,利用峰值信噪比(peak signal to noise ratio,psnr)来衡量嵌入水印后的载体图像与原始载体图像之间的变化。计算方法如下:
[0079][0080][0081]
其中m,n为图像尺寸,f(i,j)、g(i,j)分别为原始图像和目标图像的像素点,m
max
为图像中像素值的最大值,峰值信噪比psnr值越高,说明目标图像和原始图像越相近,在psnr值大于30db时目标图像和原图在人眼观测效果中没有明显差别。
[0082]
本发明的基于改进博奇编码和数据区间映射的高鲁棒全息水印算法,该算法包括水印嵌入过程和版权认证步骤:
[0083]
1、水印嵌入过程的具体步骤包括如下内容:
[0084]
在水印嵌入阶段,先将彩色图像的亮度分量信息进行频域变换、分块和schur分解,然后将将预处理后的水印信息嵌入子块的最大奇异值中。设h为彩色载体图像,大小为m
×
n
×
3,w为水印图像,大小为p
×
q,具体步骤如下:
[0085]
步骤1:将水印图像w进行全息加密。将大小为p
×
q的二值版权图像进行傅里叶全息加密,并对傅里叶全息图像进行改进的burch编码,得到尺寸为2p
×
2q的全息图bw。
[0086]
步骤2:全息图像预处理。将得到的全息图像bw进行区间映射和子块映射操作,得到图像bw1。
[0087]
步骤3:将rgb载体图像h转换到yuv颜色空间,得到h
y
、h
u
、h
v
三个分量,并对亮度分量h
y
进行两次小波分解,得到尺寸为低频系数ll。
[0088]
步骤4:对低频系数ll进行4
×
4不重叠分块,每个子块记为b
i,j
,并对每个子块进行schur分解,得到酉矩阵u
i,j
和上三角矩阵t
i,j
,如下式所示:
[0089]
[u
i,j
,t
i,j
]=schur(b
i,j
)
[0090]
其中
[0091]
步骤5:在上三角矩阵t
i,j
中嵌入预处理之后的全息图bw1中的元素,嵌入方法如下式所示:
[0092][0093]
其中δ=mod(t
i,j
(1,1),q),mod是取模运算,t
i,j
(1,1)为上三角矩阵t
i,j
第一行第
一列元素,q为水印嵌入强度。
[0094]
步骤6:对嵌入水印信息后的t'
i,j
(1,1)进行逆schur变换和逆小波变换,得到嵌入信息后的亮度分量h'
y
,并根据步骤3中得到的u分量h
u
和v分量h
v
,变换到rgb颜色空间,得到嵌入水印的载体图像h'。
[0095]
水印提取过程是水印嵌入的逆过程。在水印信息提取过程中,只需要提取攻击后载体图像的特征点和用户密钥k1即可提取出水印信息,令受攻击之后的载体图像为h'
att
,水印提取具体步骤如下:
[0096]
步骤1:对受攻击之后的载体图像h'
att
提取surf特征点,将k1密钥中的特征点和载体图像h'
att
特征点匹配,选择三对不重合且不共线的匹配点,生成仿射矩阵,对载体图h'
att
进行仿射变换得到矫正后载体图h”att
。
[0097]
步骤2:将rgb颜色空间的彩色图像h”att
变换到yuv颜色空间,取其中的亮度分量y
att
进行两次小波变换,取变换后的低频系数ll'。
[0098]
步骤3:对低频系数ll'进行不重叠的4
×
4分块,对得到的子块b'
i,j
,并依次进行schur矩阵分解,得到上三角矩阵t”i,j
,如下式所示:
[0099]
[~,t”i,j
]=schur(b'
i,j
)
[0100]
其中,
[0101]
步骤4:取上三角矩阵t”i,j
第一行第一列的元素t”i,j
(1,1),并按下式提取水印信息。
[0102][0103]
其中δ'=mod(t”i,j
(1,1),q),mod是取模运算,t”i,j
(1,1)为上三角矩阵t”i,j
第一行第一列元素,q为水印嵌入强度,bw'为提取得到的全息编码矩阵。
[0104]
步骤5:对全息编码矩阵bw'进行区间逆映射,并进行全息再现过程,得到二值水印图像w'。
[0105]
表1
[0106][0107]
表2
[0108][0109]
本发明采用了多个方法进行实验,这里展示一组实验结果。如表1、表2所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1