一种新增建设用地监测方法及装置与流程
1.本申请涉及遥感信息提取技术领域,尤其涉及一种新增建设用地监测方法及装置。
背景技术:
2.在国土资源管理中,对于进行土地执法监察和土地督察等业务,需要监测新增建设用地,以实现新增违法建设用地的监测。
3.目前,通过高分一号、高分二号等卫星采集的高分辨率影像进行新增建设用地提取,具体包括以下三种方式:第一种:基于像元的分类方法。具体的,结合构建出的各种新增建设用地指数,例如:形态学建筑物指数(mbi)、像元形状指数(psi)和建筑物存在指数(pantex),如果像元的值超过阈值,则提取为新增建设用地。第二种:基于对象的分割分类方法。具体的,通过不同的像元聚类算法将像元扩展至对象级,采用多尺度对影像进行分割,形成多个对象层,进而利用更丰富的特征库,例如:光谱、形状、大小、纹理、空间关系特征和上下文关系特征等,以实现新增建设用地的提取,或者利用特定的模型,例如:基于pantex定义的建设用地识别模型,以实现新增建设用地的分类。第三种:深度学习方法。具体的,采集海量的新增建设用地样本库并进行人工统一标记,确定合适的网络架构,例如:alexnet、vggnet、fcn、u
‑
net等网络,再通过样本库优化训练确定的网络,以优化更新网络的参数,最后将优化训练好的网络应用于目标区域,以自动提取目标区域内的新增建设用地。
4.但是,在工程化应用中,提取新增建设用地时所用的影像一般会被处理成真彩色正射影像图(dom)。而从真彩色影像图中无法获取需要近红外波段才能计算的指数,例如:ndvi、ndwi等,从而导致依赖近红外光谱信息的新增建设用地提取方法无法使用。若采用上述第一种中的基于像元的分类方法,容易出现“椒盐现象
·”,同时也无法保证较低的漏检率。若采用上述第二种中的基于对象的分割分类方法,当影像图上目标的大小与假设模型中的情况相差较大,或者,建设用户周围没有明显的阴影时,特征图像的假设模型不成立,如果仍采用假设模型进行建设用地提取,会出现偏差,提取效果较差。而若采用上述第三种中的深度学习方法,由于需要获取海量的标记样本,以进行网络优化训练,对于工程化实现建设用地的提取造成了一定的障碍,并且查全率和虚警率之间的矛盾也无法得到有效解决。
技术实现要素:
5.本申请实施例的目的是提供一种新增建设用地监测方法及装置,能够更加全面、准确地监测出新增建设用地。
6.为解决上述技术问题,本申请实施例提供如下技术方案:
7.本申请第一方面提供一种新增建设用地监测方法,包括:
8.接收前时相真彩色正射影像图、后时相真彩色正射影像图和基础矢量,所述前时
相真彩色正射影像图和所述后时相真彩色正射影像图为同一地区不同时相的真彩色正射影像图,所述基础矢量用于表征所述前时相真彩色正射影像图获取时间或比所述前时相真彩色正射影像图获取时间早的某一时段各区域的土地利用类型;
9.将所述前时相真彩色正射影像图和所述后时相真彩色正射影像图分别从rgb色彩空间变换到lab色彩空间,得到前时相lab图像和后时相lab图像;
10.将所述基础矢量转为基础影像对象层,在所述基础影像对象层中,每个矢量图斑对应一个影像对象,每个影像对象都继承了对应矢量图斑的所有属性信息;
11.在所述基础影像对象层的约束下,对所述前时相lab图像和所述后时相lab图像先以小尺度参数进行分割,得到小尺度参数影像对象层;将小尺度参数影像对象层复制一份,对其中与周围对象在前时相lab特征和后时相lab特征的差异均小于限定阈值的对象,以大尺度参数按照同质性规则进行合并,得到大尺度参数影像对象层;所述大尺度参数影像对象层中的对象,是由所述小尺度参数影像对象层中的对象按照同质性规则合并得到的,且合并后的影像对象边界不超出所述基础影像对象层内对应对象的边界;
12.分别提取所述大尺度参数影像对象层内和所述小尺度参数影像对象层内对象的空间特征;
13.基于所述大尺度参数影像对象层内对象的空间特征和所述小尺度参数影像对象层内对象的空间特征确定所述小尺度参数影像对象层的土地利用类型是否由非建设用地变为了建设用地,以监测新增建设用地。
14.本申请第二方面提供一种新增建设用地监测装置,包括:
15.接收模块,用于接收前时相真彩色正射影像图、后时相真彩色正射影像图和基础矢量,所述前时相真彩色正射影像图和所述后时相真彩色正射影像图为同一地区不同时相的真彩色正射影像图,所述基础矢量用于表征所述前时相真彩色正射影像图获取时间或比所述前时相真彩色正射影像图获取时间早的某一时段各区域的土地利用类型;
16.转换模块,用于将所述前时相真彩色正射影像图和所述后时相真彩色正射影像图分别从rgb色彩空间变换到lab色彩空间,得到前时相lab图像和后时相lab图像;
17.所述转换模块,用于将所述基础矢量转为基础影像对象层,在所述基础影像对象层中,每个矢量图斑对应一个影像对象,每个影像对象都继承了对应矢量图斑的所有属性信息;
18.分割模块,用于在所述基础影像对象层的约束下,对所述前时相lab图像和所述后时相lab图像先以小尺度参数进行分割,得到小尺度参数影像对象层;将小尺度参数影像对象层复制一份,对其中与周围对象在前时相lab特征和后时相lab特征的差异均小于限定阈值的对象,以大尺度参数按照同质性规则进行合并,得到大尺度参数影像对象层;所述大尺度参数影像对象层中的对象,是由所述小尺度参数影像对象层中的对象按照同质性规则合并得到的,且合并后的影像对象边界不超出所述基础影像对象层内对应对象的边界;
19.特征计算模块,用于分别提取所述大尺度参数影像对象层内和所述小尺度参数影像对象层内对象的空间特征;
20.监测模块,用于基于所述大尺度参数影像对象层内对象的空间特征和所述小尺度参数影像对象层内对象的空间特征确定所述小尺度参数影像对象层的土地利用类型是否由非建设用地变为了建设用地,以监测新增建设用地。
21.本申请第三方面提供一种电子设备,包括:处理器、存储器、总线;其中,所述处理器、所述存储器通过所述总线完成相互间的通信;所述处理器用于调用所述存储器中的程序指令,以执行第一方面中的方法。
22.本申请第四方面提供一种计算机可读存储介质,包括:存储的程序;其中,在所述程序运行时控制所述存储介质所在设备执行第一方面中的方法。
23.相较于现有技术,本申请第一方面提供的新增建设用地监测方法,在接收到前时相真彩色正射影像图和后时相真彩色正射影像图后,将前时相真彩色正射影像图和后时相真彩色正射影像图从rgb色彩空间变换到lab色彩空间,得到前时相lab图像和后时相lab图像,进而对前时相lab图像和后时相lab图像进行分割,得到大尺度参数影像对象层和小尺度参数影像对象层,从而提取大尺度参数影像对象层和小尺度参数影像对象层的空间特征,最后基于大尺度参数影像对象层和小尺度参数影像对象层的空间特征确定小尺度参数影像对象层的土地利用类型变化情况,以监测新增建设用地。通过在lab色彩空间下提取图像中对象的空间特征,并基于lab色彩空间下对象的空间特征确定对象是否为新增建设用地,能够更加贴近人眼对于颜色的感知,更加准确地描述地物特征,更加全面、准确地监测出新增建设用地。
24.本申请第二方面提供的新增建设用地监测装置、第三方面提供的电子设备、第四方面提供的计算机可读存储介质,与第一方面提供的新增建设用地监测方法具有相同或相似的有益效果。
附图说明
25.通过参考附图阅读下文的详细描述,本申请示例性实施方式的上述以及其他目的、特征和优点将变得易于理解。在附图中,以示例性而非限制性的方式示出了本申请的若干实施方式,相同或对应的标号表示相同或对应的部分,其中:
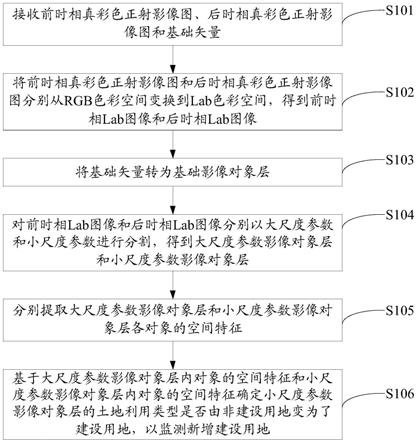
26.图1示意性地示出了新增建设用地监测方法的流程图一;
27.图2示意性地示出了新增建设用地监测方法的流程图二;
28.图3示意性地示出了新增建设用地监测装置的结构图;
29.图4示意性地示出了电子设备的结构图。
具体实施方式
30.下面将参照附图更详细地描述本申请的示例性实施方式。虽然附图中显示了本申请的示例性实施方式,然而应当理解,可以以各种形式实现本申请而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本申请,并且能够将本申请的范围完整的传达给本领域的技术人员。
31.需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本申请所属领域技术人员所理解的通常意义。
32.本申请实施例提供一种新增建设用地监测方法,图1示意性地示出了新增建设用地监测方法的流程图一,参见图1所示,该方法可以包括:
33.s101:接收前时相真彩色正射影像图、后时相真彩色正射影像图和基础矢量。
34.其中,前时相真彩色正射影像图和后时相真彩色正射影像图为同一地区不同时相
的真彩色正射影像图。基础矢量用于表征前时相真彩色正射影像图获取时间或比前时相真彩色正射影像图获取时间早的某一时段各区域的土地利用类型。
35.以分辨率为0.8米的北京二号卫星为例,分别获取其在2020年4月和2020年5月采集的遥感影像数据。该遥感影像数据包括4个波段,分别为蓝波段、绿波段、红波段和近红外波段。经过处理,该遥感影像数据被处理成3波段的8比特真彩色正射影像图,即前时相真彩色正射影像图和后时相真彩色正射影像图。
36.s102:将前时相真彩色正射影像图和后时相真彩色正射影像图分别从rgb色彩空间变换到lab色彩空间,得到前时相lab图像和后时相lab图像。
37.在传统的rgb色彩空间中,r、g、b三个颜色分量具有较强的相关性,并且只能从色度信息上进行描述,不利于地物的特征提取。然而,申请人经过研究发现,在lab色彩空间中,能够更加准确地对地物进行提取。
38.lab色彩空间是1976年国际照明委员会推荐的均匀颜色空间,是一种与设备无关的颜色系统,也是一种基于生理特征的颜色系统。人眼视网膜上的椎状细胞是一种三个颜色的机制,在视觉信息向大脑的传导通路中则变成了一种三对颜色的机制,即光的强弱(黑
‑
白,l)反应、红
‑
绿(r
‑
g)反应、黄
‑
蓝(y
‑
b)反应。每对颜色都是一个颜色兴奋而另一个颜色被抑制。lab色彩空间基于人眼视觉特性,用数字化的方法描述人的视觉感应。lab色彩空间中的l分量用于表示像元的亮度,取值范围是(0,100),表示从纯黑到纯白。a表示从绿色到红色的范围,取值范围是(
‑
128,127),正值表示红色,负值表示绿色;b表示从蓝色到黄色的范围,取值范围是(
‑
128,127),正值表示黄色,负值表示蓝色。l、a、b三个分量之间是相互独立的,即亮度与色度信息分离,更有利于图像中地物与背景的分离,进而便于地物的识别。通过将标准的cie lab图像进行适当变换,得到本发明中使用的lab图像。
39.s103:将基础矢量转为基础影像对象层。
40.在基础影像对象层中,每个矢量图斑对应一个影像对象,每个影像对象都继承了对应矢量图斑的所有属性信息。
41.s104:对前时相lab图像和后时相lab图像分别以大尺度参数和小尺度参数进行分割,得到大尺度参数影像对象层和小尺度参数影像对象层。
42.具体来说,就是在基础影像对象层的约束下,对前时相lab图像和后时相lab图像先以小尺度参数进行分割,得到小尺度参数影像对象层;将小尺度参数影像对象层复制一份,对其中与周围对象在前时相lab特征和后时相lab特征的差异均小于限定阈值的对象,以大尺度参数按照同质性规则进行合并,得到大尺度参数影像对象层;大尺度参数影像对象层中的对象,是由小尺度参数影像对象层中的对象按照同质性规则合并得到的,且合并后的影像对象边界不超出基础影像对象层内对应对象的边界。
43.在具体实施过程中,可以将多尺度分割和多阈值分割结合起来使用。具体来说,先对前时相lab图像和后时相lab图像进行多尺度分割,再对分割后得到的影像对象根据lab图像三个图层的特征进行多阈值分割,从而能够使图像中的大小建筑物都与背景完美的分割出来。当然,也可以是先对前时相lab图像进行多阈值分割,再对分割后的图像块进行多尺度分割。而对于进行多尺度和多阈值分割的具体方式,均为现有技术。此处不再赘述。
44.s105:分别提取大尺度参数影像对象层和小尺度参数影像对象层各对象的空间特征。
45.在以大小两种尺度参数从前时相lab图像和后时相lab图像中分割出大尺度参数影像对象层和小尺度参数影像对象层后,需要确定两个影像对象层下的对象在前时相和后时相影像上分别为何种具体的地物,进而实现对新增建设用地的监测。因此,需要获取大尺度参数影像对象层和小尺度参数影像对象层内所有对象的特征,进而基于大尺度参数影像对象层和小尺度参数影像对象层内对象的特征确定大尺度参数影像对象层和小尺度参数影像对象层内对象在前时相和后时相影像上具体的土地利用类型,从而确定对象是否由非建设用地变为了建设用地。
46.由于前时相lab图像和后时相lab图像为lab色彩空间的图像,故而大尺度参数影像对象层和小尺度参数影像对象层内的对象在前、后两个时相均具有以l、a、b这三个分量描述的特征。
47.s106:基于大尺度参数影像对象层内对象的空间特征和小尺度参数影像对象层内对象的空间特征确定小尺度参数影像对象层的土地利用类型是否由非建设用地变为了建设用地,以监测新增建设用地。
48.在确定大尺度参数影像对象层和小尺度参数影像对象层各对象的空间特征后,根据对象的空间特征,分别确定对象在前时相和后时相上的土地利用类型,进而根据每个对象土地利用类型的变化情况,确定每个对象是否为新增建设用地,即在小尺度参数影像对象层内确定对象的土地利用类型是否由非建设用地变为了建设用地,从而实现某一区域内新增建设用地的监测。
49.由上述内容可知,本申请实施例提供的新增建设用地监测方法,在接收到前时相真彩色正射影像图和后时相真彩色正射影像图后,将前时相真彩色正射影像图和后时相真彩色正射影像图从rgb色彩空间变换到lab色彩空间,得到前时相lab图像和后时相lab图像,进而对前时相lab图像和后时相lab图像进行分割,得到小尺度参数影像对象层和大尺度参数影像对象层,从而提取小尺度参数影像对象层和大尺度参数影像对象层的空间特征,最后基于大小两个尺度参数影像对象层内各对象的空间特征确定小尺度参数影像对象层的土地利用类型变化情况,以监测新增建设用地。通过在lab色彩空间下提取图像中对象的空间特征,并基于lab色彩空间下对象的空间特征确定对象是否为新增建设用地,能够更加贴近人眼对于颜色的感知,更加准确地描述地物特征,更加全面、准确地监测出新增建设用地。
50.进一步地,作为图1所示方法的细化和扩展,本申请实施例还提供了一种新增建设用地监测方法。图2示意性地示出了新增建设用地监测方法的流程图二,参见图2所示,该方法可以包括:
51.s201:接收基础影像和基础矢量。
52.对于用户来说,当需要监测新增建设用地时,需要数据基础影像和基础矢量。
53.基础影像就是卫星采集的某一地区不同时相的遥感影像数据。新增建设用地监测装置在接收到上述遥感影像数据后,进行加工处理,得到3波段8比特的前时相真彩色正射影像图和后时相真彩色正射影像图。
54.基础矢量能够表征前时相图像中或更早一些的时间段内各区域的土地利用类型,多数情况下,基础矢量表征的土地利用类型要早于前时相影像的拍摄时间。例如:基础矢量中包含有铁路用地、公路用地、河流水面、风景名胜、特殊用地等的空间分布特征。通过基础
矢量,能够排除影像图中不会出现新增建设用地的区域,使得后期只在可能会出现新增建设用地的区域中进行新增建设用地的监测,进而提高新增建设用地的监测效率。
55.s202:生成像元级特征集合。
56.由于后续需要基于地物的空间特征识别地物的土地利用类型,进而监测新增建设用地,故可以先基于图像生成像元级的特征集合,以便于后续生成地物的空间特征。
57.具体来说,s202可以包括:
58.s2021:将前时相真彩色正射影像图和后时相真彩色正射影像图分别从rgb色彩空间变换到xyz色彩空间,得到前时相过渡图像和后时相过渡图像。
59.rgb色彩空间转xyz色彩空间的计算公式如下:
60.x=var_r*0.4124+var_g*0.3576+var_b*0.1805
61.y=var_r*0.2126+var_g*0.7152+var_b*0.0722
62.z=var_r*0.0193+var_g*0.1192+var_b*0.9505
63.其中,
[0064][0065][0066][0067]
s2022:分别对所述前时相过渡图像和所述后时相过渡图像进行标准cie lab变换,然后在变换后图层中加入预设参数并进行向下取整操作,得到所述前时相lab图像和所述后时相lab图像。
[0068]
xyz色彩空间转lab色彩空间的计算公式如下:
[0069]
l=int(116f(y/yn)
‑
16+c)
[0070]
a=int(500[f(x/xn)
‑
f(y/yn)]+c)
[0071]
b=int(200[f(y/yn)
‑
f(z/zn)]+c)
[0072]
其中,int为向下取整函数,c为偏移量(即预设参数),x、y、z为物体的三刺激值,xn、yn、zn为cie标准照明体的三刺激值(xn=95.047,yn=100.000,zn=108.883),函数f(t)的计算公式如下:
[0073][0074]
为了使得前时相lab图像和后时相lab图像的值域与8比特值域一致,因此需要在标准的cielab计算结果的基础上,在l、a、b三个分量上均加上c,并进行取整。经过这样处理后,l、a、b三个分量的值均落在区间(0,255)内,更有利于直接进行阈值选取和图像处理操作。
[0075]
c的计算公式如下:
[0076]
‑
min(l
min
,a
min
,b
min
)≤c≤255
‑
man(l
min
,a
min
,b
min
)
[0077]
其中,l
min
表示rgb色彩在标准cie lab色彩空间中l分量的最小值,a
min
表示rgb色彩在标准cie lab色彩空间中a分量的最小值,b
min
表示rgb色彩在标准cie lab色彩空间中b分量的最小值,l
max
表示rgb色彩在标准cie lab色彩空间中l分量的最大值,a
max
表示rgb色彩在标准cie lab色彩空间中a分量的最大值,b
max
表示rgb色彩在标准cie lab色彩空间中b分量的最大值。
[0078]
s2023:基于前时相lab图像和后时相lab图像计算l、a、b各图层的差值特征图层。
[0079]
也就是说,计算后时相lab图像中l层与前时相lab图像中l层的差值特征图层l_diff,计算后时相lab图像中a图层与前时相lab图像中a图层的差值特征图层a_diff,以及计算后时相lab图像中b图层与前时相lab图像中b图层的差值特征图层b_diff。
[0080]
s2024:对前时相lab图像和后时相lab图像进行边缘检测。
[0081]
图像的边缘是指图像局部区域亮度变化显著的部分,该部分的灰度剖面一般可以看作是一个阶跃,即从一个较小的灰度值急剧变化到一个相对较大的灰度值。通过对前时相lab图像和后时相lab图像进行边缘检测,能够便于后续对前时相lab图像和后时相lab图像进行分割。
[0082]
在具体实施过程中,在对前时相lab图像和后时相lab图像进行高斯去噪后,可以基于lee sigma算子和canny算子对前时相lab图像和后时相lab图像的l图层进行边缘检测,分别得到:qsx_lee_sigma、qsx_l_canny、hsx_lee_sigma和hsx_l_canny。
[0083]
最后,将s2022
‑
s2024得到的结果整合在一起,就得到了像元级特征集合,以备后续使用。
[0084]
s203:基于基础矢量排除不会出现新增建设用地的区域。
[0085]
在具体实施过程中,根据基础矢量确定前时相lab图像中不会出现新增建设用地的区域,例如:铁路用地、公路用地、河流水面、风景名胜及特殊用地。通过棋盘分割按照矢量图斑的边界生成影像对象,如果对象在对应的矢量图斑中的地类名称为以上不会出现新增建设用地的类型,则将对象的类别赋为“不找变化的区域”,仅类别为未分类(unclassified)的对象参与后续的分割。
[0086]
s204:自适应多尺度、多阈值分割。
[0087]
具体的,s204可以包括:
[0088]
s2041:基于区域内异质性最小的区域合并算法对未分类对象范围内的前时相lab图像和后时相lab图像进行多尺度分割,得到小尺度参数影像对象层和大尺度参数影像对象层。
[0089]
通过设置参与分割的图层的权重以及分割后图斑的形状异质性、光谱异质性、紧凑度将图像分割成不同尺度的对象。分割后的对象与对象之间的平均异质性最大、对象内部像元之间的同质性最大。
[0090]
通过基于区域内异质性最小的区域合并算法,从最初的单个像元逐渐合并成较小的影像对象,再逐渐合并成较大的影像对象,最终通过设置的最优的分割尺度完成影像分割。
[0091]
例如:将s1和s2合并成s,那么,s的区域异质性公式如下:
[0092]
f=w
color
h
color
+(1
‑
w
color
)h
shape
[0093]
其中,w
c
olor为合并后图斑的光谱权重,h
color
为合并后图斑的光谱异质性,h
shape
为
合并后图斑的形状异质性。
[0094]
在确定最优的分割尺度时,首先计算不同分割尺度下影像对象同质性的变化率(rates of change of lv,roc
‑
lv),然后,当roc
‑
lv达到最大,即出现峰值时,该点对应的分割尺度就是最优的分割尺度,从而实现自适应多尺度分割。
[0095]
在使用最优的分割尺度进行多尺度分割后,仍可能会存在细小建设用地没有与背景完美分割开的情况。这时,可以继续采用自适应多阈值分割的方式进行进一步分割。
[0096]
s2042:采用自适应多阈值分割的方式对小尺度参数影像对象层内的对象进行分割,得到对象仍保存在于小尺度参数影像对象层。
[0097]
所谓自适应多阈值分割,是通过合理的阈值直接将图像分割成若干对象区域,不需要先验知识。当目标区域的灰度值与周围相差很大时,能够有效地进行分割。具体来说,根据影像特征对形态滤波后的邻域平均直方图进行峰谷检出,并快速拟合出高斯函数参数。对各峰区数据单独进行截断数据、统计分析确定拟合参数,较好地避免多峰交叠所带来的干扰,能够实现复杂图像的自适应多阈值分割。
[0098]
举例来说,将一幅m
×
n的数字图像表示为一个二维灰度函数f(x,y),则(x,y)点的局部灰度平均值g(x,y)为:
[0099][0100]
通过样本计算偏度,取绝对最小偏度确定该区域的峰值,并拟合分布的概率密度函数为:
[0101][0102][0103]
最后,通过约束条件:
[0104]
pi(ti)=pi+1(ti)
[0105]
得到各个峰区的正态拟合函数{pi(x)}和{ti}。从而基于确定出的多个阈值进行自适应分割。
[0106]
仍以从北京二号卫星采集的遥感影像数据中监测新增建设用地为例,采用步骤s2041确定的最优的分割尺度为10。形状参数为0.1,紧实度参数为0.5。采用步骤s2042确定的后时相b图层的阈值为139。
[0107]
s205:基于限定条件采用多尺度分割合并算法合并邻域图斑。
[0108]
在进行完小尺度影像分割后,会存在一个完整的地物被分割成多个对象的现象。故而,还需要继续将相邻的、特征相对一致的相邻对象进行合并。
[0109]
在具体实施过程中,结合改进lab色彩空间的l、a、b图层,分析邻域范围内对象的差异性,将差异小于一定阈值的对象在较大尺度参数条件约束进行合并。其中,较大尺度参数的值是通过以5为步长逐渐递增的方式确定的。最终确定的多尺度分割合并算法中差异阈值的约束条件为:
[0110]
abs_hsx_l_mean_diff_to_unclassified<5
[0111]
abs_hsx_a_mean_diff_to_unclassified<5
[0112]
abs_hsx_b_mean_diff_to_unclassified<5
[0113]
abs_qsx_a_mean_diff_to_unclassified<5
[0114]
其中,abs_hsx_l_mean_diff_to_unclassified表示分割对象在hsx_l上与周边unclassified地类的均值之差的绝对值,hsx_l为后时相图像中的l图层。abs_hsx_a_mean_diff_to_unclassified、abs_hsx_b_mean_diff_to_unclassified、abs_qsx_a_mean_diff_to_unclassified的含义与abs_hsx_l_mean_diff_to_unclassified相似。hsx_a为后时相图像中的a图层,hsx_b为后时相图像中的b图层,qsx_a为前时相图像中的a图层。
[0115]
其中,上述约束条件中阈值的取值为反复试验后确定的。这样,就完成了多尺度对象的合并。
[0116]
仍以从北京二号卫星采集的遥感影像数据中监测新增建设用地为例,采用步骤s205确定的最优的分割尺度为80。形状参数为0.1,紧实度参数为0.5。
[0117]
这里需要说明的是:在通过多尺度分割形成小尺度参数对象层和大尺度参数对象层之后,还需要预先提取两个影像对象层内对象的空间特征,从而通过这些空间特征来判断对象类别是否是由非建设用地变为了建设用地。
[0118]
表1示出了待提取的空间特征。
[0119]
表1待提取的空间特征
[0120]
[0121][0122]
本申请在进行特征选取时,有别于通常的基于统计方法的特征优选方法,而是充分借助lab色彩空间可直接表现地物特点的优势,依据目标地物的视觉特性来选取的。结合lab色彩空间中l、a、b三个分量的具体物理意义,从颜色、亮度、密度、与周围环境的对比关系等方面,主要以l、a、b三个分量的均值或标准差,以及其他在表1中的空间特征来描述目
标地物。
[0123]
接下来,就是基于目标对象的空间特征进行地物识别,进而监测新增建设用地。
[0124]
这里还需说明的是,在确定后续的各约束条件的阈值时,主要采用样本极值法。在选取样本时,尽量选取靠近目标与非目标的临界点的样本(每类约十几个即可)。根据l图层、a图层和b图层表示的色彩特征,直接根据样本的最大值或最小值确定阈值。描述高亮目标时,l阈值应该取样本中l的最小值;描述红色目标时,a阈值应该取样本中a的最小值;描述蓝色目标时,b阈值应该取样本中b的最大值。样本极值法的计算公式如下:
[0125]
q=max(k1,k2,
…
,k
n
)或min(k1,k2,
…
,k
n
)
[0126]
其中,q表示确定的阈值,k1,k2…
,k
n
表示样本1,样本2,
…
,样本n在某一特征上的值,max()表示取最大值函数,min()表示取最小值函数。
[0127]
这里还需说明的是,大尺度参数影像对象层中的对象,是由小尺度参数影像对象层中的若干对象按照一定的规则合并得到的。因此,大尺度影像对象层更适合用来提取面积较大的地物或形状、纹理等特征更突出的地物。而小尺度影像对象层更适合用来提取面积较小的地物或光谱特征更突出而形状、纹理等特征不是很重要的地物。
[0128]
s206:在大尺度参数影像对象层提取新增建设用地。
[0129]
具体来说,基于对象在前时相和后时相的空间特征,确定对象在前时相和后时相上的土地利用类型,进而确定对象是否为新增建设用地。其中,包括提取新增蓝顶房、新增植被变为疑似建设用地和排除新增农业设施这一干扰地物。
[0130]
(1)提取新增蓝顶房
[0131]
具体来说,根据对象在后时相b图层的均值(mean hsx_b)与蓝顶房b阈值的对比结果,确定对象在后时相是否为蓝顶房;对后时相为蓝顶房的对象,后时相b图层均值与前时相b图层的差值(b_diff)与蓝色变化阈值对比,确定对象在前时相是否已经是蓝顶房。后时相是蓝顶房且前时相不是蓝顶房的对象,即为新增蓝顶房。其中,蓝顶房b阈值为所有后时相为蓝顶房的样本在后时相b图层均值上的最大值;蓝色变化阈值为所有新增蓝顶房样本中,后时相b图层均值与前时相b图层均值之差的最大值,该值为一个负数。
[0132]
在具体实施过程中,b图层能够最大程度地反应出蓝顶房的变化,因此,采用最大类间方差计算前景“蓝顶房”和背景的最佳阈值,确定为139,并以此阈值在大尺度对象上进行蓝顶房分割。
[0133]
选择一定数量的蓝顶房样本,在样本中尽可能包括各种类型的情况,例如:淡蓝色房顶、深蓝色房顶等。获取样本在后时相b波段、前时相b波段和后时相l波段上的阈值范围,例如:后时相b波段值域在130至138,前时相b波段值域在140至150,后时相l波段值域在170至190。通过这3个空间特征及确定的阈值,完成新增蓝顶房的特征描述,具体如下:
[0134]
mean hsx_b<138and mean qsx_b>150and mean hsx_l>188
[0135]
mean hsx_b<131and mean qsx_b>145and mean hsx_l>188
[0136]
mean hsx_b<136and mean qsx_b>140and mean hsx_l>188
[0137]
mean hsx_b<137and mean qsx_b>145and mean hsx_l>195
[0138]
mean hsx_b<130and mean qsx_b>140and mean hsx_l>170
[0139]
(2)提取植被变为疑似建设用地
[0140]
具体来说,根据对象在前时相a图层的均值、后时相a图层的均值、后时相l图层的
边缘特征,分别与对应的植被变为疑似建设用地阈值的对比结果,确定对象是否为植被变为疑似建设用地,其中,对应的植被变为疑似建设用地阈值基于植被变为疑似建设用地样本对象中前时相lab图像中a图层的最大值、后时相lab图像中a图层的最小值、后时相lab图像中l图层边缘特征的最小值。
[0141]
在具体实施过程中,在真彩色图像上,植被表现为绿色,相应的a值比较低。而疑似建设用地一般不再为绿色,相应的a值就比较高。因此,初步确定阈值为142至148,将满足条件“mean qsx_a<142and mean hsx_a>147”的对象标记为“植被_建设用地”类。
[0142]
以前后时相的影像为基础,选取一定量的植被变为建设用地的样本,将样本的各个空间特征集进行变异系数计算并对其进行排序,最终获得植被变建设用地的最优空间特征集及其阈值区域,并根据样本统计结果进行目标地物提取。从样本统计结果中可以看出,lab色彩空间变换后的a波段、l波段以及边缘检测运算后的candy波段能够较大程度上对其进行识别,因此,首先将满足条件“mean hsx_a>141and mean hsx_l_canny>0.3”或“mean hsx_a>138and mean diff.to hsx_a,hsx_植被>13”的对象分类为“植被_建设用地”类。其中,“mean diff.to hsx_a,hsx_植被>13”表示对象在后时相a图层均值上比周围后时相为植被类别的对象大13以上。
[0143]
最后,在“植被_建设用地”地类的周边循环搜索与其边界重合度最大的对象,保证新增建设用地的对象完整合理。将循环搜索满足“rel.border to植被_建设用地>0.8”的对象赋值为“植被_建设用地”类,循环次数为5次。
[0144]
(3)提取新增农业设施
[0145]
具体来说,根据前时相对象和后时相对象所处区域的图斑数、前时相对象与相邻对象在l图层上的差值、后时相对象与相邻对象在l图层上的差值,与农业设施阈值的对比结果,确定后时相对象是否为新增农业设施。
[0146]
其中,农业设施阈值为农业设施样本所在区域的图斑数的最小值,前、后时相的l图层差值的最小值。
[0147]
在具体实施过程中,由于新增农业设施与建设用地在光谱信息的变化上较为一致,因此,新增农业设施需要单独作为一个特征地类进行提取。通过分析影像上目标地物的特点,申请人发现设施大棚或中小棚一般会成片出现,在使用小尺度参数进行分割后,表现为对象密度大的特点。因此,这里需要构建区域性的特征,即建立“对象特征缓冲30m的区域”,进而获得图斑数量,以快速提取新增农业设施。分别选取新增农业设施和非新增农业设施200个样本,采用seath方法计算“缓冲30m范围内的图斑数量”特征的分类阈值,最终确定阈值为15,即将“新增农业设施潜在区域”中“number of新增农业设施潜在区域(30)<15”的对象赋值为“非新增农业设施”类。
[0148]
在“新增农业设施潜在区域”中,计算图斑与新增农业设施潜在区域在后时相亮度波段的平均差值特征(mean diff.to hsx_l,新增农业设施潜在区域),并通过算法获取最佳分割阈值6。同样的方法获取图斑与新增农业设施潜在区域在前时相亮度波段的平均差值特征的阈值为3。因此,将“新增农业设施潜在区域”中“mean diff.to hsx_l,新增农业设施潜在区域>6and mean diff.to qsx_l,新增农业设施潜在区域<3”的对象赋值为“新增农业设施”类。
[0149]
这里需要说明的是,目标地物的提取整体是“提取结合逐步排除”的思路,通过最
优空间特征确定主要新增农业设施后,需要在新增农业设施的周边进行搜索,保证新增农业设施提取率。采用循环提取的方式将满足条件“mean diff.to hsx_l,新增农业设施潜在区域>4and mean diff.to qsx_l,新增农业设施潜在区域<2and rel.border to l1_新增农业设施>0.1”的对象赋值为“新增农业设施”类。循环搜索条件“rel.border to l1_新增农业设施>0.9”的对象,分类为“新增农业设施”类。至此,完成新增农业设施的提取工作,保证了新增农业设施的检测率。
[0150]
接下来,综合考虑目标提取物相对偏小对象的大小及分割效果,在以10为分割尺度分割出来的小尺度影像对象层中,在大尺度参数分割图层提取出来的新增蓝顶房、新增农业设施范围以外,即父对象不为新增蓝顶房、新增农业设施的对象,将面积在10个像元以上的目标新增建设用地划分成“新增红顶房、新增蓝顶房、新增绿顶房、新增灰顶房、新增高亮地表和新增其他建设用地”6大类,以及前面在大尺度参数分割图层提取出来的“植被变为疑似新增建设用地”类别(仅在不包含以上6类新增建设用地时予以保留,能够保证提取的“植被变为疑似新增建设用地”图斑中不包含大片的非变化部分),结合已经建立像元级别和对象级别的特征集,以样本极值法确定各目标地类在各空间特征上的最佳阈值,进行新增建设用地的提取。
[0151]
s207:在小尺度参数影像对象层提取新增建设用地。
[0152]
具体来说,小尺度参数影像对象层中,基于对象在前时相和在后时相的空间特征分别确定前时相和后时相对应的土地利用类型是否为目标类型,进而确定对象是否是新增建设用地。其中,目标类型包括新增红顶房、新增蓝顶房、新增绿顶房、新增灰顶房、新增高亮地表和新增其它建设用地。在提取这些目标类型以前,先把在大尺度影像对象层中已经确定为新增蓝顶房、新增农业设施的对象所对应的小尺度影像对象层中的对象相应地赋为新增蓝顶房、新增农业设施,其它对象保持为未分类(unclassified)。
[0153]
(1)提取新增红顶房
[0154]
具体来说,根据未分类对象在后时相a图层的均值(mean hsx_a)、前时相a图层的均值(mean qsx_a),与红顶房阈值的对比结果,确定后时相小尺度对象和新增植被变为疑似建设用地区域是否为新增红顶房。
[0155]
其中,红顶房阈值为新增红顶房样本在后时相a图层上的最小值和在前时相a图层上的最大值。
[0156]
在具体实施过程中,红顶房在影像a图层上表现为明显的高亮特征。选择红顶房样本约300个进行特征筛选和确定前期的特征值域区间,最终通过特征筛选的a波段均值(mean a)和亮度均值(mean l)能够最大程度地提取出红顶房。首先,对对象在后时相a图层上进行阈值分割,阈值156;然后,通过逐步逼近最优阈值区间的方法确定提取阈值,通过阈值区间提取出红顶房。
[0157]
具体的,先排除前后时相上均为红顶房的对象,即将满足约束条件“mean hsx_a>159and mean qsx_a>159”的未分类对象赋值为“l2_qsx_hsx_均为红顶房”。然后,在未分类对象中提取新增红顶房,约束条件如下:
[0158]
条件1:mean hsx_a>156and mean qsx_a<153and mean hsx_l>=184
[0159]
条件2:mean hsx_a>160and mean qsx_a<153and rel.border to l2新增红顶房>0.01
[0160]
(2)提取新增蓝顶房
[0161]
由于一些比较小的新增蓝顶房在大尺度参数影像对象层中可能没有分割出来,因此,在小尺度参数影像对象层中,对前面大尺度参数影像对象层提取出来的新增蓝顶房、新增农业设施以外的区域,还需要再次提取新增蓝顶房。
[0162]
具体来说,在小尺度参数影像对象层中,根据未分类对象在后时相b图层的均值、后时相b图层均值与前时相b图层均值的差值,与蓝顶房阈值的对比结果,确定后时相小尺度对象和新增植被变为疑似建设用地区域是否为新增蓝顶房。这里的蓝顶房阈值与步骤s206(1)中地蓝顶房阈值相同。
[0163]
在具体实施过程中,首先,排除前后时相上均为蓝顶房的对象,即将满足约束条件“mean hsx_b<138and mean qsx_b<138”的未分类对象赋值为“l2_qsx_hsx_均为蓝顶房”。
[0164]
然后,提取新增蓝顶房,将满足以下任何一项约束条件的未分类对象,都标记为潜在新增蓝顶房:
[0165]
条件1:mean hsx_b<138and mean qsx_b>150and mean hsx_l>188
[0166]
条件2:mean hsx_b<131and mean qsx_b>145and mean hsx_l>188
[0167]
条件3:mean hsx_b<130and mean qsx_b>140and mean hsx_l>188and mean qsx_l<180
[0168]
条件4:mean hsx_b<135and mean qsx_b>140and mean hsx_l>188and mean qsx_l<180and rel.border to l2新增蓝顶房>0
[0169]
条件5:mean hsx_b<136and mean qsx_b>140and mean hsx_l>188
[0170]
条件6:mean hsx_b<137and mean qsx_b>145and mean hsx_l>195
[0171]
条件7:mean hsx_b<130and mean qsx_b>140and mean hsx_l>170
[0172]
(3)提取新增绿顶房
[0173]
具体来说,根据未分类对象在所述前时相a、b各图层的均值分别与前时相绿顶房的a和b阈值的对比结果,确定对象在前时相上不是绿顶房,再根据对象在所述后时相a、b各图层的均值分别与后时相绿顶房a和b阈值的对比结果,确定是否为新增绿顶房。
[0174]
其中,前时相绿顶房a阈值为前时相绿顶房样本在前时相a图层上的最大值,所述前时相绿顶房b阈值为前时相绿顶房样本在前时相b图层上的最大值,所述后时相绿顶房a阈值为后时相绿顶房样本在后时相a图层上的最大值,所述后时相绿顶房b阈值为后时相绿顶房样本在后时相b图层上的最大值。
[0175]
在具体实施过程中,由于在基础矢量“耕地”中提取绿顶房,绿顶房的数量较少,因此,除了采用绿顶房样本确定绿顶房阈值,进而提取新增绿顶房之外,还可以不采用样本确定特征和阈值的方式进行提取,而是直接采用约束条件描述的方式进行。即,将满足约束条件“mean hsx_b<149and mean hsx_a<138and mean qsx_b>153and mean qsx_a>145”的对象标记为“新增绿顶房”。在合并“新增绿顶房”对象后,还可以根据图斑大小对提取对象进行规整。
[0176]
(4)提取新增灰顶房
[0177]
由于目标为灰色,不具备明显的颜色特征,因此,需要借助房子的阴影来进行灰顶房的判断。
[0178]
具体来说,将后时相l图层均值小于指定阈值的对象,赋为阴影类别。对于后时相
表现为灰色而前时相不为灰色的未分类对象,根据对象向北平移指定像元数后与阴影的重叠指数,与灰顶房阴影重叠阈值的对比结果,确定该对象是否为新增灰顶房。
[0179]
其中,灰顶房阴影重叠阈值为预设重叠指数参数,所述灰色采用对象a均值介于一定的区间且b均值介于一定的区间范围的方式来确定;
[0180]
在具体实施过程中,由于灰顶房主要分布在农林地周边,因此,直接在基础矢量上确定灰顶房的提取范围,将满足约束条件“"dlmc":thematic layer 1="旱地"or"dlmc":thematic layer 1="水浇地"or"dlmc":thematic layer 1="设施农用地"or"dlmc":thematic layer 1="有林地"”的“unclassified”的对象赋值为“l2_找小灰顶房的范围”。
[0181]
借用房子与其西北方向的建筑物阴影之间的关系,首先,根据hsx_l值区分出hsx_阴影;然后,定义移动后与hsx_阴影的重叠关系。对象向北移动3个像元后与hsx_阴影的重叠度,即shift_north_overlap_hsx_阴影=[overlap of two objects overlap of object with other(class=hsx_阴影,shift=0x3x0x0,mode=relative to larger object[0..1]]。在此基础上,将满足“mean hsx_a>143and mean hsx_a<148and mean hsx_b>148and mean hsx_b<154and mean hsx_l>190and mean hsx_l<205and shift_north_overlap_hsx_阴影>0.001”的“l2_找小灰顶房的范围”赋值为“l2_小灰顶房”。
[0182]
(5)提取新增高亮地表
[0183]
具体来说,在小尺度参数影像对象层中,根据未分类对象在前时相l图层上的均值与前时相高亮地表阈值的对比结果,以及在后时相l图层上的均值与后时相高亮地表阈值的对比结果,确定对象是否为新增高亮地表。
[0184]
其中,前时相高亮地表阈值为新增高亮地表样本在前时相l图层的最大值、所述后时相高亮地表阈值为新增高亮地表样本在后时相l图层的最小值;
[0185]
在具体实施过程中,首先,排除前、后时相上均为高亮地表的对象,即将满足约束条件“mean hsx_l>215and mean qsx_l>215”的对象赋值为“l2_qsx_hsx_均为高亮地表”。然后,基于后时相l图层,采用最大类间方差法确定图像分割阈值为219,进而采用阈值分割方法将对象再次进行分割,最大程度上完成高亮地表与其他地物的分离。
[0186]
接着,通过选取的高亮地表样本进行样本特征统计,在新增高亮地表的提取中,最优空间特征为l图层均值、b图层均值和经过lee sigma边缘检测后的图层均值。通过上述几个图层在前、后时相上的阈值初步确定“新增高亮地表”,具体约束条件如下:
[0187]
mean hsx_l>218and mean qsx_l<201
[0188]
mean hsx_l>202and mean qsx_l<201and mean hsx_lee_sigma>5
[0189]
mean hsx_l>202and mean qsx_l<203and mean hsx_lee_sigma>7
[0190]
在初步确定“新增高亮地表”后,通过周边未分类的地物与“新增高亮地表”之间的邻域关系,再提取一部分遗漏的“新增高亮地表”,使得在目标提取时尽可能的保证“新增高亮地表”的提取率。具体约束条件如下:
[0191]
①
mean hsx_l>200and mean qsx_l<195and mean hsx_lee_sigma>5.5and mean qsx_b>157and mean hsx_b<156and mean diff.to hsx_l,unclassified>10
[0192]
②
mean hsx_l>212and mean diff.to hsx_l,unclassified>15
[0193]
在确定“新增高亮地表”的区域后,根据提取对象的几何特征(紧致度、图斑狭长指数等)及与周边相邻对象的空间关系进行“新增高亮地表”的确定,排除符合如下约束条件
的对象:
[0194]
compactness>2and rel.border to l2_qsx_hsx_均为高亮地表>0.1
[0195]
shape index>2.5and mean diff.to qsx_l,unclassified>3and length/width<5
[0196]
p_a_rate>0.7或者p_a_rate>0.1and rel.border to l2_qsx_hsx_高亮地表>0.1
[0197]
(6)提取新增其它建设用地
[0198]
具体来说,根在小尺度参数影像对象层中,根据未分类对象在前时相l图层的标准差与新增其它建设用地前时相l标准差阈值的比较结果、后时相l图层的标准差与新增其它建设用地后时相l标准差阈值的比较结果、后时相a图层的均值与新增其它建设用地后时相a阈值的比较结果,对象的狭长指数与狭长指数阈值的比较结果,确定对象是否为新增其它建设用地。
[0199]
其中,其它建设用地前时相l标准差阈值为新增其它建设用地样本在前时相上l标准差的最大值,其它建设用地后时相l标准差阈值为新增其它建设用地样本在后时相上l标准差的最小值,其它建设用地后时相a阈值为新增其它建设用地样本在后时相上a均值上的最小值;狭长指数阈值为新增其它建设用地样本在狭长指数上的最大值。
[0200]
在具体实施过程中,由于新增其他建设用地数量很少,因此,除了采用样本极值法确定阈值,进而提取其它建设用地之外,还可以直接描述约束条件进行提取。具体的约束条件为:将满足“standard deviation qsx_l>12and standard deviation hsx_l<6and mean hsx_a>148and p_a_rate<=0.4”的对象,赋值为新增其他建设用地。
[0201]
这里需要说明的是,在提取的新增建设用地中,还可能混入一些非新增建设用地。为了确保新增建设用地监测的准确性,在提取出新增建设用地后,还需要对提取的新增建设用地进行剔除优化。
[0202]
具体来说,基于小尺度参数影像对象层的图斑狭长指数,删除小尺度参数影像对象层中的非目标对象。其中,非目标对象为非新增建设用地对应的对象。
[0203]
(1)优化新增蓝顶房(对于大尺度参数分割对象层)
[0204]
通过特征描述确定新增蓝顶房中存在细长条、面积较小的不规则对象,因此,构建“狭长指数”特征:p_a_rate=([border length]
‑
[area])/[area],用以描述窄条形栅格对象,进而优化新增蓝顶房。通过空间逻辑和构建的p_a_rate等几何特征指数对新增蓝顶房进行剔除优化,对“新增蓝顶房”集合中的“非新增蓝顶房”的描述如下:
[0205]
p_a_rate>0.7
[0206]
area<50pxl and mean hsx_l<190
[0207]
(2)优化植被变为疑似建设用地
[0208]
主要通过几何特征和后时相颜色特征进行剔除。具体如下:
[0209]
排除“area<100pxl or p_a_rate>0.5or mean hsx_l<187”的对象。
[0210]
排除“mean hsx_l<193and mean hsx_a<147and mean hsx_b<159”的对象。
[0211]
(3)优化新增农业设施
[0212]
主要从对象几何特征、边缘特征、密度特征、亮度特征等方面上进行排除。具体如下:
[0213]
排除“新增农业设施”中满足条件“mean qsx_l_canny>0.15”的对象。
[0214]
排除“新增农业设施”中满足条件“area<2000pxl and number of l1_新增农业设施(500)<2”的对象。
[0215]
排除“mean hsx_l<190”的“新增农业设施”对象。
[0216]
农业设施用地在影像纹理上表现为边缘清晰,再结合农业设施用地的颜色特征,确定将“mean hsx_l_canny<0.03and mean hsx_b>160”的“新增农业设施”排除。将满足条件“area>1000pxl and mean hsx_b>160”的“新增农业设施”排除。
[0217]
合并相邻的“新增农业设施”类对象。
[0218]
(4)优化新增红顶房
[0219]
由于红顶房识别在a图层上容易受到暗红色地物干扰,因此,需要从提取的“新增红顶房”中剔除一些由于受到暗红色地物干扰而被误提的对象。例如:耕地中满足约束条件“mean hsx_a<161and mean diff.to hsx_l,l2耕地<6”的对象。还有其它的约束条件如下:
[0220]
mean hsx_l<184or p_a_rate>0.5or mean qsx_l>212
[0221]
mean hsx_a<167and rel.border to l2_qsx_hsx_均为红顶房>0
[0222]
p_a_rate>0.2and mean diff.to hsx_a,unclassified<6
[0223]
mean diff.to hsx_a,unclassified<5
[0224]
mean qsx_l>205and mean qsx_a>145
[0225]
最后,结合专题矢量中的原地类属性进行特殊排除。主要依靠基础地类的描述特征,具体如下:当原来为“村庄、建制镇”的对象满足条件“standard deviation qsx_l>10”或者“mean hsx_l<190”时,则为非“新增红顶房”。
[0226]
(5)优化新增蓝顶房(对于小尺度参数分割对象层)
[0227]
在潜在新增蓝顶房中,还存在干扰地物需要排除,还需排除的对象的约束条件如下:
[0228]
rel.border to l2_qsx_hsx_均为蓝顶房>0and p_a_rate>=
‑
0.4
[0229]
p_a_rate>0.7
[0230]
area<50pxl and mean hsx_l<190
[0231]
(6)优化新增灰顶房
[0232]
结合对象的大小特征,亮度特征,前、后时相上的色彩差异特征等进行对象排除,具体如下:
[0233]
排除对象条件为“area<xiaotuban or mean qsx_l<180”的对象。
[0234]
排除对象条件为“abs_a_diff<5and abs_b_diff<5and abs_l_diff<5”的对象。
[0235]
其中,xiaotuban为预设的表示小图斑阈值的参数。
[0236]
(7)优化新增高亮地表
[0237]
以构建的x_interval和y_interval特征结合与“l2_qsx_hsx_均为高亮地表”泪奔对象的相邻关系、与周围未分类对象的亮度差异等特征进行排除,将满足以下条件的“新增高亮地表”进行排除,具体如下:
[0238]
排除“新增高亮地表”中“y_interval<5and rel.border to l2_qsx_hsx_均为高亮地表>0”的对象。
[0239]
排除“新增高亮地表”中“x_interval<5and rel.border to l2_qsx_hsx_均为高亮地表>0”的对象。
[0240]
排除“新增高亮地表”中“x_interval<4and mean diff.to hsx_l,unclassified<10”的对象。
[0241]
排除“新增高亮地表”中“y_interval<4and mean diff.to hsx_l,unclassified<10”的对象。
[0242]
s208:整合多维度提取结果。
[0243]
为最大程度保证提取对象的完整性,需要对各部分提取出的结果进行整合。具体来说,基于预设距离数对提取出来的各种新增建设用地类别的图斑进行缓冲;将缓冲后图斑重叠部分合并。例如:将上述两个维度提取出的“新增蓝顶房”、“新增红顶房”、“新增灰顶房”、“新增绿顶房”、“新增高亮地表”、“新增其他建设用地”以及“植被变为疑似建设用地”缓冲4个像元并进行合并。这样,能够解决密集图斑的问题,同时能够去除图斑中“岛”的情况。
[0244]
至此,输出整合后的提取结果,即可实现新增建设用地的监测。
[0245]
由上述内容可知,本申请实施例提供的新增建设用地监测方法,其一,针对新增建设用地的多样性,将新增建设用地进行细化分类并逐一进行描述提取,确保了新增建设用地的漏检率稳定在1%以内。其二,提出了适用于描述窄条形地物的对象狭长指数,对提取该类对象具有很好的效果。其三,直接利用l、a、b三个分量的值来描述对象在前、后两时相影像上是否发生颜色特征的变化,以及与周围对象的差异程度,同构建特征图像方法相比,具有更强的稳定性、普适性和易扩展性,同时也解决了深度学习方法对样本依赖性高的问题。其四,在对图层对象进行分割、合并的基础上,利用对象密度、canny图层上的均值、亮度对比差异等特征,识别并剔除新增建设用地干扰地类,即新增农业设施(连栋大棚或中小棚),提升目标地物的提取精度。
[0246]
基于同一发明构思,作为对上述方法的实现,本申请实施例还提供了一种新增建设用地监测装置。图3示意性地示出了新增建设用地监测装置的结构图,参见图3所示,该装置可以包括:
[0247]
接收模块301,用于接收前时相真彩色正射影像图、后时相真彩色正射影像图和基础矢量,所述前时相真彩色正射影像图和所述后时相真彩色正射影像图为同一地区不同时相的真彩色正射影像图,所述基础矢量用于表征所述前时相真彩色正射影像图获取时间或比所述前时相真彩色正射影像图获取时间早的某一时段各区域的土地利用类型;
[0248]
转换模块302,用于将所述前时相真彩色正射影像图和所述后时相真彩色正射影像图分别从rgb色彩空间变换到lab色彩空间,得到前时相lab图像和后时相lab图像;
[0249]
所述转换模块302,用于将所述基础矢量转为基础影像对象层,在所述基础影像对象层中,每个矢量图斑对应一个影像对象,每个影像对象都继承了对应矢量图斑的所有属性信息;
[0250]
分割模块303,用于在所述基础影像对象层的约束下,对所述前时相lab图像和所述后时相lab图像先以小尺度参数进行分割,得到小尺度参数影像对象层;将小尺度参数影像对象层复制一份,对其中与周围对象在前时相lab特征和后时相lab特征的差异均小于限定阈值的对象,以大尺度参数按照同质性规则进行合并,得到大尺度参数影像对象层;所述大尺度参数影像对象层中的对象,是由所述小尺度参数影像对象层中的对象按照同质性规则合并得到的,且合并后的影像对象边界不超出所述基础影像对象层内对应对象的边界;
[0251]
特征计算模块304,用于分别提取所述大尺度参数影像对象层内和所述小尺度参数影像对象层内对象的空间特征;
[0252]
监测模块305,用于基于所述大尺度参数影像对象层内对象的空间特征和所述小尺度参数影像对象层内对象的空间特征确定所述小尺度参数影像对象层对象的土地利用类型是否由非建设用地变为了建设用地,以监测新增建设用地。
[0253]
基于前述实施例,所述转换模块,用于将所述前时相真彩色正射影像图和所述后时相真彩色正射影像图分别从rgb色彩空间变换到xyz色彩空间,得到前时相过渡图像和后时相过渡图像;
[0254]
分别对所述前时相过渡图像和所述后时相过渡图像进行标准cie lab变换,然后在变换后图层中加入预设参数并进行向下取整操作,得到所述前时相lab图像和所述后时相lab图像。所述前时相lab图像和所述后时相lab图像的值域与8比特值域一致。
[0255]
基于前述实施例,所述装置还包括:数据准备模块,用于基于所述基础矢量,将所述得到前时相lab图像和后时相lab图像的作业区域中不会出现新增建设用地的区域排除,得到基础区域。
[0256]
基于前述实施例,所述分割模块,用于基于区域内异质性最小的区域合并算法对所述前时相lab图像和所述后时相lab图像以不同的尺度参数进行分割,得到所述小尺度参数影像对象层和所述大尺度参数影像对象层。
[0257]
基于前述实施例,所述分割模块,用于在所述基础区域范围内,在所述基础影像对象层的约束下,对所述前时相lab图像和所述后时相lab图像以小尺度参数进行分割,得到小尺度参数影像对象层;
[0258]
复制所述小尺度参数影像对象层;
[0259]
在复制出来的小尺度参数影像对象层上,采用基于区域内异质性最小的区域合并算法对所述前时相lab图像和所述后时相lab图像以大尺度参数进行合并,得到所述大尺度参数影像对象层。
[0260]
基于前述实施例,所述特征计算模块,用于分别提取所述大尺度参数影像对象层内所有对象和所述小尺度参数影像对象层内所有对象的空间特征。
[0261]
基于前述实施例,所述大尺度参数影像对象层中的对象由若干个小尺度参数影像对象层中的对象合并而成,大尺度参数影像对象层中的对象为小尺度参数影像对象层中对应对象的父对象,小尺度参数影像对象层中的对象为对应大尺度参数影像对象层中对应对象的子对象;
[0262]
所述监测模块,用于基于所述大尺度参数影像对象层中对象的空间特征,若确定所述大尺度参数影像对象层中对象在后时相上为蓝顶房,而在前时相上不是蓝顶房,则判定所述大尺度参数影像对象层中对象属于新增蓝顶房;
[0263]
若确定所述大尺度参数影像对象层中对象在后时相上不表现为植被状态且对象内纹理不平滑,而在前时相上表现为植被状态,则判定所述大尺度参数影像对象层中对象属于新增植被变为疑似建设用地;
[0264]
若确定所述大尺度参数影像对象层中对象在基础矢量的属性中,属于可能出现新增农业设施的类别,且对象密集,且在后时相上亮度明显比周围高,且在前时相上亮度与周围对象差异小于预设值,则判定所述大尺度参数影像对象层中对象属于新增农业设施;
[0265]
在所述小尺度参数影像对象层中,将父对象类别为新增蓝顶房的对象赋为新增蓝顶房,将父对象类别为新增农业设施的对象赋为新增农业设施,其余对象类别保持为未分类;
[0266]
基于所述小尺度参数影像对象层中对象的空间特征,结合对象从所述基础矢量中继承的土地利用类型的属性信息,若确定所述其余对象在前时相的土地利用类型不属于建设用地,而在后时相的土地利用类型为红顶房、蓝顶房、绿顶房、灰顶房、高亮地表或其它建设用地,则对应的对象类别分别判定为新增红顶房、新增蓝顶房、新增绿顶房、新增灰顶房、新增高亮地表和新增其它建设用地;将判定出的新增红顶房、新增蓝顶房、新增绿顶房、新增灰顶房、新增高亮地表和新增其它建设用地统称为新增建设用地;
[0267]
在所述大尺度参数影像对象层中,对象类别为新增植被变为疑似建设用地,且不包含新增建设用地子对象,则将其所对应的所有子对象类别赋为新增植被变为疑似建设用地。
[0268]
基于前述实施例,所述监测模块,用于在所述大尺度参数影像对象层中,根据对象在所述后时相lab图像中b图层的均值与蓝顶房b阈值的对比结果,确定对象在所述后时相lab图像中是否为蓝顶房;对所述后时相lab图像中为蓝顶房的对象,将所述后时相lab图像中b图层均值与所述前时相lab图像中b图层均值的差值,与蓝色变化阈值对比,确定对象在所述前时相lab图像中是否已经是蓝顶房;所述后时相lab图像中是蓝顶房且所述前时相lab图像中不是蓝顶房的对象,即为新增蓝顶房;所述蓝顶房b阈值为所有后时相为蓝顶房的样本在后时相b图层均值上的最大值;所述蓝色变化阈值为所有新增蓝顶房样本中,后时相b图层均值与前时相b图层均值之差的最大值,为一个负数;
[0269]
在所述大尺度参数影像对象层中,根据对象在所述前时相lab图像中a图层的均值、所述后时相lab图像中a图层的均值、所述后时相lab图像中l图层的边缘特征,分别与对应的植被变为疑似建设用地阈值的对比结果,确定对象是否为植被变为疑似建设用地,所述对应的植被变为疑似建设用地阈值为植被变为疑似建设用地样本对象中前时相a图层的最大值、后时相a图层的最小值、后时相l图层边缘特征的最小值;
[0270]
在所述大尺度参数影像对象层中,根据所述基础矢量确定排查新增农业设施的范围,在所述范围内,根据对象的密度与农业设施密度阈值的比较结果,对象与周围相邻对象在前时相l图层均值上的差值与农业设施前时相l差异阈值的比较结果,对象在后时相l图层的均值与周围相邻对象在后时相l图层均值的差值与农业设施后时相l差异阈值的比较结果,确定对象是否为新增农业设施;所述农业设施密度阈值基于新增农业设施样本对象的密度最小值确定,所述农业设施前时相l差异阈值基于新增农业设施样本对象与相邻对象在前时相l图层均值上的差值的最大值确定,所述农业设施后时相l差异阈值基于新增农业设施样本对象与相邻对象在后时相l图层均值上的差值的最小值确定;
[0271]
在所述小尺度参数影像对象层中,根据未分类对象在后时相a图层的均值与后时相红顶房阈值的对比结果,确定对象在后时相是否为红顶房;对后时相为红顶房的对象,根据对象在前时相a图层的均值与前时相红顶房阈值的对比结果,确定对象在前时相是否已经是红顶房;后时相是红顶房且前时相不是红顶房的对象,即为新增红顶房;所述前时相红顶房阈值为所有新增红顶房样本在前时相a图层均值上的最大值,所述后时相红顶房阈值为所有新增红顶房样本在后时相a图层均值上的最小值;
[0272]
在所述小尺度参数影像对象层中,对于后时相l图层均值大于后时相蓝顶房亮度阈值的未分类对象,根据对象在后时相b图层的均值与后时相蓝顶房阈值的对比结果,确定对象在后时相是否为蓝顶房;对后时相为蓝顶房的对象,根据对象在前时相b图层的均值与前时相蓝顶房阈值的对比结果,确定对象在前时相是否已经是蓝顶房;后时相是蓝顶房且前时相不是蓝顶房的对象,即为新增蓝顶房;所述后时相蓝顶房亮度阈值为所有新增蓝顶房样本在后时相l图层均值的最小值,所述前时相蓝顶房阈值为所有新增蓝顶房样本在前时相b图层均值上的最小值,所述后时相蓝顶房阈值为所有新增蓝顶房样本在后时相b图层均值上的最大值;
[0273]
在所述小尺度参数影像对象层中,对类别为未分类的对象,根据对象在前时相a、b各图层的均值分别与前时相绿顶房a、b阈值的对比结果,确定对象在前时相上不是绿顶房,再根据对象在后时相a、b各图层的均值分别与后时相绿顶房a、b阈值的对比结果,确定是否为新增绿顶房,前时相绿顶房a阈值为前时相绿顶房样本在前时相a图层上的最大值,前时相绿顶房b阈值为前时相绿顶房样本在前时相b图层上的最大值,后时相绿顶房a阈值为后时相绿顶房样本在后时相a图层上的最大值,后时相绿顶房b阈值为后时相绿顶房样本在后时相b图层上的最大值;
[0274]
将后时相l图层均值小于指定阈值的对象,赋为阴影类别;对于后时相表现为灰色而前时相不为灰色的未分类对象,根据对象向北平移后与阴影的重叠指数,与灰顶房阴影重叠阈值的对比结果,确定对象是否为新增灰顶房,所述灰顶房阴影重叠阈值为预设重叠指数参数,灰色采用对象a均值位于预设区间且b均值位于预设区间范围的方式来确定;
[0275]
在所述小尺度参数影像对象层中,根据未分类对象在前时相l图层上的均值与前时相高亮地表阈值的对比结果,以及在后时相l图层上的均值与后时相高亮地表阈值的对比结果,确定对象是否为新增高亮地表,所述前时相高亮地表阈值为新增高亮地表样本在前时相l图层的最大值、所述后时相高亮地表阈值为新增高亮地表样本在后时相l图层的最小值;
[0276]
在所述小尺度参数影像对象层中,根据未分类对象在前时相l图层的标准差与新增其它建设用地前时相l标准差阈值的比较结果、后时相l图层的标准差与新增其它建设用地后时相l标准差阈值的比较结果、后时相a图层的均值与新增其它建设用地后时相a阈值的比较结果,对象的狭长指数与狭长指数阈值的比较结果,确定对象是否为新增其它建设用地,所述新增其它建设用地前时相l标准差阈值为新增其它建设用地样本在前时相上l标准差的最大值,所述新增其它建设用地后时相l标准差阈值为新增其它建设用地样本在后时相上l标准差的最小值,所述新增其它建设用地后时相a阈值为新增其它建设用地样本在后时相上a均值上的最小值,所述狭长指数阈值为新增其它建设用地样本在狭长指数上的最大值;
[0277]
在所述小尺度参数影像对象层中,将仍为未分类且父对象类别为新增植被变为疑似建设用的对象,赋为新增植被变为疑似建设用地。
[0278]
基于前述实施例,所述空间特征包括图斑狭长指数,所述图斑狭长指数为以像元数表达的周长与面积的比值;
[0279]
所述装置还包括:优化模块,用于在确定所述小尺度参数影像对象层的土地利用类型由非建设用地变为建设用地的情况下,基于所述小尺度参数影像对象层的图斑狭长指
数,删除所述小尺度参数影像对象层中的非目标对象,所述非目标对象为非新增建设用地对应的对象。
[0280]
基于前述实施例,所述装置还包括:合并模块,用于基于预设距离数对提取出来的各种新增建设用地类别的图斑进行缓冲;将缓冲后图斑重叠部分合并。
[0281]
这里需要指出的是,以上装置实施例的描述,与上述方法实施例的描述是类似的,具有同方法实施例相似的有益效果。对于本申请装置实施例中未披露的技术细节,请参照本申请方法实施例的描述而理解。
[0282]
基于同一发明构思,本申请实施例还提供了一种电子设备。图4示意性地示出了电子设备的结构图,参见图4所示,该电子设备可以包括:至少一个处理器401;至少一个存储器402;总线403;其中,处理器401、存储器402通过总线403完成相互间的通信;处理器401用于调用存储器402中的程序指令,以执行上述一个或多个实施例中的方法。
[0283]
这里需要指出的是,以上电子设备实施例的描述,与上述方法实施例的描述是类似的,具有同方法实施例相似的有益效果。对于本申请电子设备实施例中未披露的技术细节,请参照本申请方法实施例的描述而理解。
[0284]
基于同一发明构思,本申请实施例还提供了一种计算机可读存储介质,该存储介质包括存储的程序,其中,在程序运行时控制存储介质所在设备执行上述一个或多个实施例中的方法。
[0285]
这里需要指出的是,以上存储介质实施例的描述,与上述方法实施例的描述是类似的,具有同方法实施例相似的有益效果。对于本申请存储介质实施例中未披露的技术细节,请参照本申请方法实施例的描述而理解。
[0286]
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1