一种多元退化设备剩余寿命预测方法
1.本发明涉及设备监测技术,具体涉及多元退化设备剩余寿命预测方法。
背景技术:
2.预测与健康管理技术通过实时监测的健康状态信息评估设备的可靠性,预测设备的剩余使用寿命,并在此基础上制定合理的维修策略,从而保证设备安全可靠运行。对于工作在复杂环境下的多元退化设备,仅依靠单一传感器的监测数据并不能准确掌握其运行情况,需要根据多个传感器的性能监测数据来评估其健康状态,为设备后续的运行规划和维修决策提供支持。
3.深度学习由于具有强大的数据分析和学习能力,在预测与健康管理领域得到了快速发展。相较于浅层网络以及单一传感器表征的设备健康状态,深度学习更能对大规模的多元退化设备性能监测数据进行深度特征提取。在工程实际中,多元退化设备的运行状态通常受多种操作条件和复杂环境变化影响,退化建模和推导困难,使得多元设备的剩余寿命预测精度难以保证。
技术实现要素:
4.针对现有技术中的上述不足,本发明提供的多元退化设备剩余寿命预测方法能够挖掘多元退化设备的深层退化趋势,以解决现有多元退化设备剩余寿命预测不准确的问题。
5.为了达到上述发明目的,本发明采用的技术方案为:
6.提供一种多元退化设备剩余寿命预测方法,其包括步骤:
7.s1、获取多元退化设备的监测数据,并对监测数据进行预处理;
8.s2、将预处理后的监测数据输入已训练的连续深度置信网络,提取多元退化设备的实时退化特征;
9.s3、采用多元退化设备的初始健康特征和实时退化特征,计算衡量多元退化设备退化偏离初始健康状态程度的健康指标:
[0010][0011]
其中,hi为健康指标;f
t
为t时刻的实时退化特征,f
health
为初始健康特征, k为健康指标序列长度;
[0012]
s4、将健康指标用滑动时间窗处理后输入已训练且含dropout的双向长短期记忆网络对多元退化设备的剩余寿命进行预测;
[0013]
s5、重复步骤s4预设次数,之后采用蒙特卡洛仿真方法对所有预测的剩余寿命分布进行拟合,得到多元退化设备剩余寿命的区间估计结果。
[0014]
本发明的有益效果为:本方案通过连续深度置信网络对监测数据进行自动有效的深度特征提取,通过提取的退化特征构造反映设备退化偏离初始健康程度的健康指标,进
而通过双向长短期记忆网络进行剩余寿命预测,能够大幅度提高剩余寿命预测精度。
[0015]
两种神经网络的组合方法无需推导构造的健康指标对应的失效阈值,并且能够大幅提升计算和预测的效率;本方案在此基础上,通过蒙特卡洛仿真方法对预测的剩余寿命分布进行拟合,能有效解决常见深度学习模型中预测结果不确定性难以度量的问题,保证了预测的剩余寿命的准确性,为后续设备健康管理提供可靠依据。
附图说明
[0016]
图1为多元退化设备剩余寿命预测方法的流程图。
[0017]
图2为连续受限玻尔兹曼机的网络架构。
[0018]
图3为双向长短期记忆网络bilstm的网络架构。
[0019]
图4为lstm的记忆单元的网络架构。
[0020]
图5为连续深度置信网络提取的健康指标。
[0021]
图6为单个航空发动机剩余寿命预测结果。
[0022]
图7为测试集中100台航空发动机剩余寿命预测结果。
[0023]
图8为第76号航空发动机剩余寿命区间估计,其中(a)为剩余寿命概率密度曲线,(b)为剩余寿命区间估计。
[0024]
图9为第100号航空发动机剩余寿命区间估计,其中(a)为剩余寿命概率密度曲线,(b)为剩余寿命区间估计。
具体实施方式
[0025]
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人元理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人元来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
[0026]
参考图1,图1示出了多元退化设备剩余寿命预测方法的流程图;如图1所示,该方法包括步骤s1至步骤s5。
[0027]
在步骤s1中,获取多元退化设备的监测数据,并对监测数据进行预处理;本方案提到的多元退化设备为航空发动机、伺服机构或轴承;对于航空发动机,其对应监测数据包括航空发动机重要截面气流的压力、温度、发动机转速和耗油率;对于伺服机构,其对应监测数据包括伺服机构中传感器零位、角位移、电压、电机相电流和旋变位置信号;对于轴承,其对应监测数据包括轴承的温度及各个方向上的振动信号。
[0028]
实施时,本方案优选对监测数据进行预处理的方法包括:
[0029]
采用卡尔曼滤波对监测数据进行降噪处理,并采用min
‑
max归一化方法对降噪后的数据进行处理,将监测数据缩放至0~1之间。
[0030]
由于在工程实际中,受到外部扰动,获得的多元退化设备的监测数据往往包含大量随机噪声,本方案采用卡尔曼滤波处理后,能够提高监测数据的平滑度。min
‑
max归一化方法能够提高神经网络的训练精度。
[0031]
在步骤s2中,将预处理后的监测数据输入已训练的连续深度置信网络,提取多元退化设备的实时退化特征。
[0032]
在本方案中,连续深度置信网络由多个连续受限玻尔兹曼机堆叠而成,如图2所示,连续受限玻尔兹曼机包括可视层、隐藏层以及层间连接,其层内无连接,通过在可视层添加一个均值为零的高斯噪声从而引入一个连续随机单元;连续受限玻尔兹曼机的隐藏层神经元个数小于可视层神经元个数。
[0033]
连续受限玻尔兹曼机crbm的可视层用于接收输入数据,隐藏层用于提取特征,通过最小化对比散度算法将隐藏层数据重构回可视层,计算输入数据与重构数据之间的误差,根据误差值调整网络参数,通过逐层训练对原始数据特征进行深度挖掘。对于连续深度置信网络crbm,其隐藏层中每个神经元的输入与可视层中所有神经元的状态相关,按可视层神经元的贡献赋以相应权值。
[0034]
在本发明的一个实施例中,连续深度置信网络的训练方法包括:
[0035]
采用仿真实验或实际监测获取预设数量(预设数量指代的是监测数据的数量)的多元退化设备在不同工作模式下从正常运行至失效的监测数据,并对监测数据进行预处理;
[0036]
将预处理后的监测数据中的失效数据作为训练集a,退化数据作为测试集a;
[0037]
采用训练集a对连续深度置信网络进行无监督训练,得到已训练的连续深度置信网络。
[0038]
连续深度置信网络提取多元退化设备的实时退化特征的方法包括:
[0039]
采用最小化对比散度算法逐层对连续受限玻尔兹曼机的连接权重和噪声控制项参数进行迭代更新:
[0040][0041]
其中,η
w
和η
a
分别为连接权重和噪声控制参数的学习率;s
j
为神经元j的输出;s
i
为其他神经元对神经元j的输入;为神经元j一步重构后的状态;为神经元i一步重构后的状态;δw
ij
为连接权重的变化量;w
ij
为连接权重;δa
j
为噪声控制项参数的变化量;a
j
为噪声控制项参数;<
·
>为数据期望;
[0042]
根据更新后的连接权重和噪声控制项参数,计算各层神经元的输出:
[0043][0044][0045]
其中,为渐近线在θ
l
和θ
h
处的sigmoid函数;θ
l
和θ
h
分别为φ
j
函数的下渐近线和上渐近线;exp(
·
)为指数函数;x
j
为神经元j的所有输入;σ为常数项; n
j
(0,1)为均值为0,方差为1的高斯噪声,其概率分布为:
[0046][0047]
其中,p(n
j
)为噪声输入部分n
j
的概率密度分布;n
j
为噪声输入部分。
[0048]
采用连续深度置信网络得到实时退化特征,实现了高维原始监测数据到低维退化
特征的抽象表示,充分挖掘多元退化设备运行期间的健康状态信息。
[0049]
在步骤s3中,采用多元退化设备的初始健康特征和实时退化特征,计算衡量多元退化设备退化偏离初始健康状态程度的健康指标:
[0050][0051]
其中,hi为健康指标;f
t
为t时刻的实时退化特征,f
health
为初始健康特征, k为健康指标序列长度。
[0052]
在步骤s4中,将健康指标用滑动时间窗处理后输入已训练且含dropout的双向长短期记忆网络对多元退化设备的剩余寿命进行预测;dropout作用于同一时间步中双向长短期记忆网的各层神经元的信息传递过程,按照一定概率让神经元随机失活。
[0053]
在本发明的一个实施例中,含dropout的双向长短期记忆网络的训练方法包括:
[0054]
将训练集a和测试集a分别输入已训练的连续深度置信网络提取实时退化特征,得到实时退化特征集a和实时退化特征集b;
[0055]
分别计算实时退化特征集a和实时退化特征集b对应的健康指标,并利用滑动时间窗处理健康指标,得到反映设备退化趋势的时间序列;
[0056]
将训练集a对应的时间序列作为训练集b,将测试集a分对应的时间序列作为测试集b;
[0057]
将训练集b中每组时间序列的下一个监测点所对应的剩余寿命值作为训练标签;
[0058]
将训练集b输入双向长短期记忆网络,通过监督学习,对其输出与训练标签进行对比得到输出误差;
[0059]
当输出误差大于预设误差或迭代次数小于预设迭代次数时,将每次迭代得到的输出误差进行反向传播更新网络门控节点的权重矩阵;
[0060]
当输出误差小于等于预设误差或迭代次数等于预设迭代次数时,得到已训练的双向长短期记忆网络。
[0061]
如图3所示,本方案的双向长短期记忆网络bilstm由前向长短期记忆(long short
‑
term memory,lstm)网络和后向lstm共同构成,能够沿着两个时间方向处理输入时间序列。前向lstm获取输入序列的过去信息,后向lstm 获取输入序列的未来信息,因此能够更加深入的挖掘设备监测数据所包含的时序信息,实现过去和未来信息的充分利用。
[0062]
前向lstm和后向lstm的记忆单元主要包括遗忘门、输入门和输出门,具体结构如图4所示。记忆单元实现数据处理的过程为:
[0063]
首先利用上一时刻的输出状态h
t
‑1和当前时刻的输入x
t
,计算出遗忘门f
t
、输入门i
t
、输出门o
t
以及候选状态然后,结合遗忘门f
t
和输入门i
t
来更新记忆单元c
t
,其中,遗忘门用于控制上一时刻的单元状态c
t
‑1传递至当前时刻单元状态c
t
需要遗忘多少信息,输入门控制当前时刻的候选状态有多少需要保存至单元状态c
t
;最后,利用输出门o
t
将当前时刻的单元状态c
t
传递给输出状态h
t
,该过程可以表达如下:
[0064]
f
t
=σ(w
f
·
[h
t
‑1,x
t
]+b
f
),i
t
=σ(w
i
·
[h
t
‑1,x
t
]+b
i
),
[0065]
o
t
=σ(w
o
·
[h
t
‑1,x
t
]+b
o
),
[0066]
其中,w
f
、w
i
、w
o
、w
c
分别为遗忘门、输入门、输出门和单元状态的权重矩阵;b
f
、b
i
、b
o
、b
c
分别为遗忘门、输入门、输出门和单元状态的偏置;σ和φ分别是sigmoid激活函数和tanh激活函数。
[0067]
实施时,本方案优选步骤s4进一步包括:
[0068]
对健康指标进行滑动时间窗处理,得到时间序列;
[0069]
双向长短期记忆网络的前向长短期记忆网络和后向长短期记忆网络分别根据输入的时间序列得到前向输出状态和后向输出状态:
[0070][0071]
其中,和分别为前向输出状态和后向输出状态;x
t
为t时刻的时间序列数值;
[0072]
连接前向输出状态和后向输出状态,预测得到多元退化设备的剩余寿命:
[0073][0074]
其中,y
t
为预测的剩余寿命;和分别为前向长短期记忆网络和后向长短期记忆网络到输出层的连接权重;b
y
为输出层的偏置。
[0075]
在步骤s5中,重复步骤s4预设次数,之后采用蒙特卡洛仿真方法对所有预测的剩余寿命分布进行拟合,得到多元退化设备剩余寿命的区间估计结果。
[0076]
下面以多元退化设备航空发动机为例,对本方案的剩余寿命预测方法的预测效果进行说明:
[0077]
航空发动机结构复杂,状态监测变量类型多,获得的监测数据维度高、数量大。以nasa经过仿真实验获取的航空发动机从正常运行至失效的cmapss数据集为例对所提方法进行验证。该数据集共有航空发动机在不同工作状态和故障模式下的4组监测数据,其中包含21个能够表征航空发动机工作状态的典型指标。每组数据包括训练集、测试集以及剩余寿命标签三部分,训练集为航空发动机的失效数据,测试集为测试航空发动机的退化数据,剩余寿命标签与测试集相对应,为每个测试航空发动机最后监测时刻的剩余寿命。
[0078]
实验过程中,选取单工况和单故障模式下的fd001数据集,训练集和测试集分别包含100台航空发动机的状态监测数据,筛选出14个变化较明显的变量数据作为输入进行多元退化设备的剩余寿命预测。
[0079]
1、构造反映多元退化设备隐含深层特征的健康指标
[0080]
在构造连续深度置信网络时,其网络参数参见表1,通过无监督训练方法对连续深度置信网络进行训练。根据测试集和训练集输出的退化特征和初始健康特征,计算得到测试集和训练集对应的健康指标。
[0081]
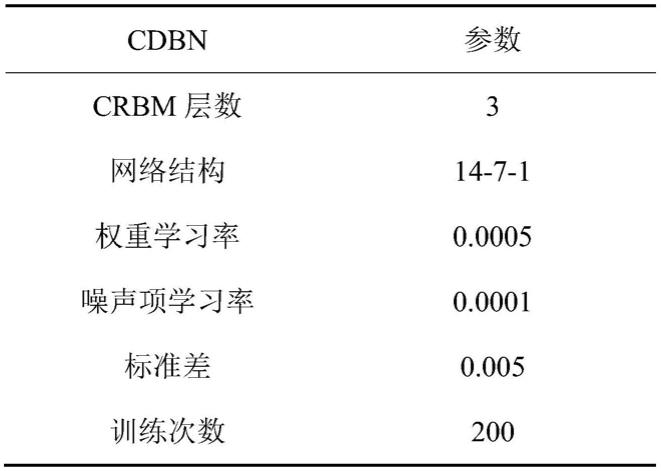
表1 cdbn网络参数
[0082][0083]
如图5所示,其为100台航空发动机训练集和测试集数据构建出的健康指标,刻画航空发动机随着运行周期的增加偏离初始健康状态的程度。通过图5可以看出,在性能退化前期,曲线斜率平缓,健康指标变化较慢,而随着运行时间的累积,健康指标偏离初始健康状态的速率逐渐加快,与实际设备的运行退化趋势相符。
[0084]
由于测量不确定性、退化过程的随机性以及设备运行状态受环境影响产生的变化,健康指标曲线通常包含随机波动,并且,设备的退化特征与运行时间相关。基于此,选用鲁棒性和趋势性两种指标来评价所构造健康指标的优劣,对比了主成分分析、深度置信网络和本方案所提方法(连续深度置信网络),测试集平均评价指标结果对比如表2。
[0085]
从表2可以看出,通过连续深度置信网络提取的健康指标,鲁棒性和趋势性均优于其他常用的降维方法,因此本方案能更好的挖掘性能监测数据中隐含的设备退化深层特征。
[0086]
表2健康指标hi评价指标对比
[0087][0088]
2、基于健康指标预测多元退化设备的剩余寿命
[0089]
将连续深度置信网络的训练集及测试集对应的健康指标分别作为双向长短期记忆网络的训练集及测试集;为满足双向长短期记忆网络对输入数据的要求,利用滑动时间窗处理健康指标,得到反映设备退化趋势的时间序列训练集和测试集。采用训练集对应的每组时间序列的下一个监测点所对应的剩余寿命值作为训练标签。将训练集输入双向长短期记忆网络进行训练,其输出与训练标签进行对比,将每次迭代得到的输出误差进行反向
传播从而更新网络门控节点的权重矩阵,最后得到训练好的网络模型。
[0090]
航空发动机各性能监测变量在退化初期均变化较小,因此提取的健康指标在退化初期变化也比较缓慢。为了提高模型预测的准确性,假定设备在运行初期无退化,将设备剩余寿命标签设为分段线性,最大值设为125。由于1号航空发动机仅有31个测试循环,为充分利用所有测试数据,将滑动时间窗设置为30。
[0091]
为防止过拟合,同时得到由随机权重系数引入的剩余寿命预测不确定性,设置dropout为0.2,蒙特卡洛仿真的采样次数设置为1000。bilstm网络参数设置如表3所示,此时得到的评分函数和均方根误差最小,因此基于以上网络参数,将测试集代入训练好的双向长短期记忆网络,得到航空发动机的剩余寿命预测结果。
[0092]
表3bilstm网络参数
[0093][0094]
为了衡量所提预测模型的优劣,选取常用的两个性能度量:评分函数和均方根误差对剩余寿命预测效果进行评价。表4给出了五种方法的预测效果对比,相较于浅层机器学习方法和单一有监督的深度学习模型,本方案所提方法考虑到融合无监督与有监督学习模型的优越性,结合连续深度置信网络和双向长短期记忆网络的优势,预测结果得到进一步改善。
[0095]
表4不同方法剩余寿命预测结果对比
[0096][0097]
由于航空发动机的性能退化状态与实时有效的监测数据有关,监测数据越全,预测效果越好,因此本实例选取测试循环比较多的4台航空发动机实例,分别为第24台、34台、76台和第100台,给出其一次全测试循环的剩余寿命预测结果如图6所示。
[0098]
由图6可以观察到,尽管在测试循环前期预测值与实际剩余寿命之间存在一定误差,但随着航空发动机单元运行时间的累积,本方案所提方法的预测结果较准确,具有一定的工业参考价值,因此对航空发动机的后期状态进行准确评估,可以有效保障飞机的飞行安全,降低运行维护成本。
[0099]
3、通过蒙特卡洛仿真获得剩余寿命的区间估计
[0100]
剩余寿命的不确定性度量对于保障设备安全有效运行至关重要,贝叶斯神经网络方法假设神经网络模型内部连接权重为服从某一分布的随机变量而非固定系数,通过权重的随机性刻画出预测结果的不确定性。在本方案所提网络模型中引入dropout,等价实现模型随机权重系数变分推理过程,并通过蒙特卡洛仿真技术得到由随机权重系数引入的剩余寿命预测结果不确定性。
[0101]
根据测试数据集中各航空发动机最后监测点处剩余寿命标签值,按照从大到小顺序排列,可得如图7中的预测结果。在图7中,虚线为100台发动机的真实剩余寿命,加号线为经过分段线性处理后的剩余寿命标签,通过蒙特卡洛仿真技术对预测结果进行区间估计,得到预测剩余寿命均值为图中圆圈线所示,并给出了预测结果95%的置信区间。
[0102]
由图7可以看出,本方案所提方法得到的剩余寿命预测均值与真实剩余寿命基本吻合,预测结果的95%置信区间基本能覆盖真实剩余寿命,并且置信区间的宽度随着航空发动机真实剩余寿命变小而有逐渐变窄的趋势,是因为航空发动机随着运行时间的累积,故障特征逐渐增强,其退化特征和趋势能更好的被本方案所提网络捕获,因此预测结果更好。
[0103]
在航空发动机退化初期,由于性能监测数据较少,航空发动机的退化趋势并不明显,图7中前一部分所示的预测结果,对于监测数据较少的测试航空发动机,预测的剩余寿命均值与真实剩余寿命之间存在一定偏差,当测试集监测数据越来越充分时,预测效果越来越好。
[0104]
表5给出测试集中不同监测数据量下4台航空发动机的剩余寿命预测结果,结果表明,获得的监测数据越充分,退化趋势越明显,本方案所提方法的预测效果越好。此外,通过
蒙特卡洛仿真技术给出预测剩余寿命95%置信区间,可以帮助运维人员对预测结果的可信度进行衡量。
[0105]
表5不同运行周期剩余寿命预测结果对比
[0106][0107][0108]
如图7和图8所示,分别给出了第76台航空发动机和第100台航空发动机通过蒙特卡洛仿真技术得到最后6个监测点处剩余寿命的概率密度曲线,以及剩余寿命预测全测试循环95%置信区间。
[0109]
从图中可以看出,随着航空发动机运行周期的增加,故障特征不断增强,本方案所提预测方法可获得更精确的剩余寿命预测结果及分布形式,该结果可直接用于航空发动机后续的运行规划、维修决策等健康管理活动中。
[0110]
综上所述,本方案提供的多元退化设备剩余寿命预测方法能够通过多元健康状态特征,挖掘多元退化设备的深层退化趋势,以解决监测数据呈现大规模、非线性、高维化等特点的多元退化设备剩余寿命预测不准确的问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1