一种柔性触觉式移动机器人操作输入装置及交互方法
1.本发明涉及移动机器人交互控制领域,特别是涉及一种柔性触觉式移动机器人操作输入装置及交互方法。
背景技术:
2.触觉感知是虚拟现实、遥操作等许多应用中运动捕捉模块的重要工具之一,可实现对真实世界人物交互的接触感知,在如电影、游戏、运动、生物力学、机器人控制等领域有着诸多应用。传统的移动机器人交互式输入装置多为方向盘、手柄等形式,一方面此类输入装置多以输入移动机器人运动方向为主,另一方面此类装置需要安装于固定基座,不便于形成穿戴式的交互装置。近年来也出现了基于计算机视觉的移动机器人操作输入方法,这就需要一定的基础架构,摄像头需要妥善安装以保证交互操作的可见性,因此主要在实验室或工作室环境内使用。针对不适合使用固定式摄像头的场景,本发明提出一种柔性触觉式移动机器人输入装置。
技术实现要素:
3.为了解决上述问题,本发明一种柔性触觉式移动机器人操作输入装置及交互方法,该装置可以识别阵列式的力触觉信号并且可以实现较大幅度的弯曲和拉伸。基于该装置所获得的力触觉信号,进一步提出了一种抚摸式交互输入方法,提出了解码抚摸式交互下阵列式力触觉信号的方法,获得移动机器人矢量速度输入以控制机器人的运动。
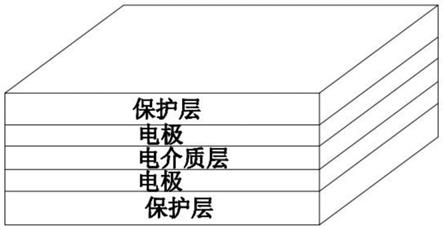
4.本发明提供一种柔性触觉式移动机器人操作输入装置,包括电容测量模块和传感器模块,所述传感器模块是包括两层屏蔽层,两层导电层和一层介电层的五层电容结构,所述介电层在最中间的位置,两层导电层分居于介电层的两层,最外面被两层屏蔽层包裹;
5.所述电容测量模块包括ne555电容测量电路,控制开关电路及频率测量电路且通过连接线相连。
6.作为本发明传感器进一步改进,所述传感器模块的介电层部分由pdms构成,导电层由导电硅胶构成,屏蔽层由硅胶材料构成,粘黏剂由pmds主剂及固化剂按10:1的比例配置而成,可以实现很大程度内的弯曲和拉伸。
7.作为本发明传感器进一步改进,所述传感器模块的介电层部分由50um的pdms构成,导电层由0.5mm的导电硅胶构成,屏蔽层由0.1mm的硅胶材料构成,可以实现较高的灵敏度。
8.作为本发明传感器的进一步改进,所述控制开关模块利用4053模拟开关按照一定的规律对行列分别进行通高低电平,以保证每次进行电容测量时,所有两极板间有压差的电容都是并联的,可以减少各电容单元之间的耦合问题。
9.本发明提供一种柔性触觉式移动机器人操作输入装置的交互方法,具体步骤如下:
10.用户沿着给定方向以不同速度抚摸柔性触觉传感器,通过解码柔软可拉伸的电容
式传感器获得的阵列式力触觉信号,估计出抚摸动作的速度方向及大小,形成矢量v作为移动机器人的速度控制输入;
11.所述柔软可拉伸的电容式传感器获取阵列式力触觉的步骤如下:
12.1)外界对传感器施加压力场,如手指在传感器上输入变速的滑动力,该力会导致传感器的局部电容发生变化;
13.2)stm32 mini控制4053模拟开关按照一定的规律对行列分别进行通高低电平;
14.3)ne555电容测量模块uo引脚输出一定频率的方波,stm32 mini的pa0口与uo引脚相连,用于接收方波;
15.4)利用输出方波的频率f和ne555电路中的测量电容cmeasured、电阻r1,r2间的函数映射关系:反解出传感器各电容单元的电容值;
16.5)stm32 mini对求得的电容单元电容值进行组帧,再通过usb串口将数据帧发送到上位机,进行可视化处理;
17.6)子线程用于接收串口数据,同时对数据解析,再发送到主线程;主线程在接收到子线程发送到的数据后,会清除窗口重新绘图,同时更新计算移动机器人控制参数;
18.所述估计出抚摸动作的速度方向及大小,形成矢量v作为移动机器人的速度控制输入具体解算方式如下:
19.(1)记柔性触觉传感器在t时刻获得的阵列式力触觉信号为f
t
,为获得t时刻的输入速度v
t
首先计算当前阵列式力触觉信号的变化d
t
=f
t
‑
f
t
‑1,之后计算阵列式力触觉信号的变化d
t
的梯度场梯度场g
t
是一个定义在二维空间的矢量场,记录了柔性触觉传感器每一个电容节点处在t时刻力触觉信号的空间变化;
20.(2)分析梯度场g
t
以获得输入速度v
t
,在对计算速度要求高的情况下,直接求和gt内的梯度矢量获得输入速度v
t
;
21.(3)为排除噪声对结果的影响,提出使用投票策略确定输入速度v
t
,计算每个电容节点 (i,j)处的梯度方向g
ij
以及梯度大小r
ij
,将梯度方向量化为n个等级,以梯度大小r
ij
为权重进行投票,统计n个方向的加权票数,选取加权票数最大的方向为输出速度方向,加权票数为输出速度大小;
22.(4)最后可以设置缩放系数k,将kv
t
作为最终提供给移动机器人的速度控制。
23.作为本发明方法进一步改进,柔软可拉伸的电容式传感器获取阵列式力触觉的步骤的步骤(6)中,可对外界传感器输入运动的方向及速度进行可视化显示,具体为:实时对传感器电容进行扫描,按照时间顺序依次对峰值电容单元进行显示,由此可判断外界输入运动的方向,同时可根据峰值电容的大小判断外界输入力量的强弱,根据各电容单元峰值显示的时间差判断外界输入的速度大小,最后由python端将控制参数输入给后续的机器人设备。
24.相比于现有分析方法,本发明的特点及其有益效果为:
25.(1)本输入装置由电容阵列组成,可以获取高维信号,实现对移动机器人的多维控制,而无需分散部署,进而可以提高工作效率。(2)本输入装置由柔软的有机硅材实现较大幅度的弯曲和拉伸,相比于传统的手柄、键盘等具有即贴即用,可放于任意曲面同时质量轻体积小等优点。
26.(2)所提出的移动机器人控制新型输入方法允许用户采用抚摸形式进行,提取出抚摸动作的速度方向和大小作为移动机器人速度输入,交互方式直观简便。
27.(3)绝大多数柔性传感器材料是基于原材料进行加工制作,制作工艺较为复杂且所涉及材料成本较高,而本发明中所涉及的材料可在市面上直接获取且成本低廉。
附图说明
28.图1为本发明的传感器结构示意图;
29.图2为本发明的电容测量电路示意图;
30.图3为本发明的移动机器人控制输入流程示意图。
具体实施方式
31.下面结合附图与具体实施方式对本发明作进一步详细描述:
32.本发明提供一种柔性触觉式移动机器人操作输入装置,该装置可以识别高维的力信号并且可以实现较大幅度的弯曲和拉伸。
33.作为本发明具体实施例,本发明提供一种柔软可拉伸的电容式传感器,包括电容测量模块和传感器模块。所述传感器模块具体如图1所示,包括两层屏蔽层,两层导电层和一层介电层的五层电容结构,其中介电层在最中间的位置,两层导电层分居与介电层的两层,最外面被两层屏蔽层包裹;介电层部分由50unpdms构成,导电层由0.5mm导电硅胶构成,0.1mm 屏蔽层由硅胶材料构成,粘黏剂由pmds主剂及固化剂按10:1的比例配置而成。
34.所述电容测量模块如图2所示,包括ne555电容测量电路,控制开关电路及频率测量电路。stm32 mini控制4053模拟开关按照一定的规律对行列分别进行通高低电平。ne555可以根据外接的电阻电容大小,调整输出方波的频率,即输出方波的频率和ne555电路中的电容、电阻大小有对应的函数映射关系。我们固定除待测电容以外的电阻大小(r1,r2),就可以得到待测电容和输出方波频率的单变量函数,从而可以根据输出方波的频率求得待测电容的大小。
35.所述移动机器人控制输入流程如图3所示,stm32 mini的计数器2以1mhz的频率对输入方波的高电平时长进行计数,当输入方波由高电平转低电平时,计数结束。计数值与计数器2的周期相乘可以得到输入方波的高电平持续时间。由于ne555电容测量模块输出的方波的占空比为50%,可以根据方波的高电平时长计算出方波的频率,从而计算出一次测量电容值。每次测量电容为四个电容单元的电容值之和。重复对电容测量五次后,进行去极值平均滤波,将结果存入到测量电容数组cm。对4053的控制线进行修改,进行下一次测量。测量完九组测量电容后,可以得到测量电容向量cm。
[0036][0037]
记电容单元向量cc为c
c
=[c
1a
,c
2a
,c
3a
,c
1b
,c
2b
,c
3b
,c
1γ
,c
2γ
,c
3γ
]
t
[0038]
可以由cm和cc之间的关系得到对应的方程组c
c
=m
×
c
m
[0039]
其中m为
[0040][0041]
解该方程组即可获得各电容单元的值。
[0042]
stm32 mini对求得的电容单元电容值进行组帧,方便上位机进行后续的数据可视化处理。实现方法:
[0043]
1)组帧,制定数据帧的格式,以7e02127为例:
[0044]
0x7e(flag)+02(电容单元序号)+127(电容值,十进制)
[0045]
flag为固定的分割符。电容单元序号用于指定当前电容值所属的电容单元,以1a,2a,3a, 1b,2b,3b,1γ,2γ,3γ顺序排列。
[0046]
在发送完九个电容单元的数据帧后,发送停止帧(7efffff)以通知上位机一次数据传输完毕
[0047]
2)发送,stm32通过usb串口将上述数据帧发送到上位机,进行可视化处理。
[0048]
上位机数据接收即可视化通过使用python的pyserial库对usb串口的数据进行接收,并使用matplotlib进行数据的可视化。实现方法:
[0049]
1)主线程用于可视化,首先定义可视化图像的相关参数,然后创建子线程用于串口数据的接收。使用pipe()函数进行线程间的通信。
[0050]
2)子线程使用serial.serial()函数创建串口通信对象。当串口接收线程接收到数据帧,先判断数据帧是否正常。若正常,则将其暂存。收到停止帧后,再统一对九个数据帧进行解析和处理。根据分割符(0x7e)对接收到的字符串进行分割,提取电容值,将电容值存储到对应的电容单元数组元素。提取完毕的电容单元数组通过pipe()函数传递给主线程。
[0051]
3)主线程收到电容单元数组后,先对画布上原有的图像进行擦除,再使用ax.bar3d()函数对接收到的电容数组单元进行可视化,以实现帧数较低的动画效果。绘图结束后等待子线程再次发送电容单元数组。
[0052]
最后python程序对电容值进行解耦后,在本示例中获得3x3的阵列式力触觉信号f,f 表示存储为3x3的矩阵。本发明提出的抚摸式交互输入下,假设t时刻的力触觉信号为f
t
,计算力触觉信号的时间变化d
t
=f
t
‑
f
t
‑1,之后计算梯度场求和梯度场以得到求和梯度场以得到其中为第(i,j)个电容节点处的梯度值。为降低噪声的影响,也可将平面运动方向划分为n个等级,如以每30度为间隔,划分成12个方向。计算的方向落在所划分的哪个区间,以的大小为权重为该区间投票。使用累计票数最多的区间所代表的方向为输入速度方向,累计票数为速度大小设定所提取的t时刻的速度v
t
。
[0053]
最后可以设置缩放系数k,将kv
t
作为最终提供给移动机器人的速度控制,输入给后续的移动机器人设备。
[0054]
本发明能够获取高维信号,实现对移动机器人的多维控制,并且可以实现较大幅度的弯曲和拉伸,即贴即用。
[0055]
以上所述,仅是本发明的较佳实施例之一,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1