一种空间目标纳米级精度成像定位方法与流程
1.本发明涉及空间极高精度指向测量技术、空间遥感以及星敏感器领域。特别涉及一种空间目标纳米级精度成像定位方法。
背景技术:
2.高精度星点质心定位方法是空间光学敏感器指向测量的关键技术,星点质心定位精度在空间光学敏感器测量过程中直接影响测量结果,且在敏感器的标定和测试中,星点质心定位精度同样会直接影响标定结果和光学敏感器指向测量精度,而纳米级成像定位精度是极高精度指向测量的基础。随着空间探测任务的多样性和高精度探测任务需求的发展,如何进行实现空间目标的纳米级成像定位精度探测至关重要。
3.光学敏感器为了进行指向测量,需要对恒星的空间目标进行成像,空间目标的质心定位精度对光学敏感器的指向测量精度有着至关重要的作用。在光学敏感器对空间目标进行探测时,受到探测器的分辨率的制约,敏感器对空间目标的成像结果为亚采样图像,在对亚采样图像进行质心定位时,传统的质心法的质心定位精度不能满足极高精度指向测量需求。因此需要针对空间极高精度指向测量需求,实现空间目标的纳米级成像定位方法。
技术实现要素:
4.本发明的目的在于:补充现有技术中对于空间目标极高精度成像定位方法的缺失,提供一种空间目标纳米级精度成像定位方法,适用于实际工程应用。本发明原理:首先采集用于建立精细化psf模型的图像数据,根据epsf方法建立极高精度的精细化psf模型;然后以高精度的精细化psf建模结果为模板,进行空间目标的高精度成像定位;
5.本发明技术方案:一种空间目标纳米级精度成像定位方法,包括高精度全视场psf建模方法,以及空间目标成像定位方法;
6.所述高精度psf建模方法的具体过程为:
7.11)首先获取用于建模的m个质心位置亚像素分布不同的图像,每个位置采集n张图像;
8.12)对每个位置的n张图像进行平均处理,降低探测器噪声的影响;
9.13)利用平均处理的图像数据,根据epsf方法建立高精度精细化psf模型;
10.所述空间目标成像定位方法的具体过程为:
11.以高精度精细化psf模型为模板,基于newton_raphson方法对空间目标进行高精度成像定位。
12.所述根据epsf方法建立高精度精细化psf模型的具体方法为:
13.131)对所有用于epsf建模的星象提取窗口大小为n*n的窗口图,获得图像模型,并在图像模型上建立psf模型,在psf模型上建立坐标系,以星象中心为原点,建立新的网格,且与图像模型中每个像素的大小相同,将图像中多个星点图像的psf模型的零点重合,置于同一个坐标系下;
14.132)对网格以一定的过采样系数oversampling进一步细分,获取每个格点周围所有采样点的epsf值的集合,将集合内的平均值作为格点的epsf值;所述epsf值与像素值的关系为:
[0015][0016]
其中,为点(i
‑
x
c
,j
‑
y
c
)处的epsf值,i、j分别为uv方向像素坐标,x
c
、y
c
分别为星点质心uv方向坐标,p
ij
为(i,j)处的像素位置的灰度值,s*为天空背景值,f*为星点通量;
[0017]
133)利用所有格点的epsf值对所有采样点进行插值,根据每个采样点的插值结果对上一次迭代得到的epsf值求残差,剔除残差大于阈值范围的采样点,多次迭代至没有需要剔除的采样点;
[0018]
134)对得到的epsf模型进行平滑滤波处理;
[0019]
135)求出星象中心坐标的偏移量之后,平移epsf模型以保证psf模型的准确;移动时对网格进行整体移动,然后求出新的网格点的epsf值;星象中心x坐标的平移方式和偏移量由式(2)和式(3)给出,y方向的偏移和x方向同理;
[0020][0021][0022]
其中,为星点质心x坐标值,δx
*
为星点质心x坐标值偏移量,w
ij
为像素灰度值权重分布,q
ij
=1/p
ij
,其中p
ij
为(i,j)处的像素位置的灰度值,r
ij
=p
ij
‑
s
*
‑
f
*
×
ψ
ij
,r
ij
表示图像(i,j)处的像素位置的灰度值,其中f
*
为星点通量,ψ
ij
为(i,j)处的epsf值;
[0023]
136)经过多次迭代和平滑的过程,得到一组平滑的网格点的值,完成epsf模型的建立;
[0024]
137)对以n*n的星点窗口,当过采样系数oversampling=n时,得到的epsf模型为(n*n)+1*(n*n)+1的二维数组,以得到的epsf模型即可进行对星点进行极高精度成像定位;n为正整数。
[0025]
所述以高精度精细化psf模型为模板,基于newton_raphson方法对空间目标进行高精度成像定位,具体过程为:
[0026]
141)根据获得的epsf模型提供的epsf及其偏导信息,对提取出来的星点窗口starwin进行newton
‑
raphson迭代,迭代方法为:
[0027][0028]
其中(x,y)为星点质心位置的迭代初值,q
11
(x1,y1),q
21
(x2,y1),q
12
(x1,y2),q
22
(x2,y2)为根据双线性差值方法计算得到的四个插值点,其中x2>x1,y2>y1;上述公式为双线性插
值得到的(x,y)位置的epsf值;同样的方法对epsf的偏导信息depx和depy进行双线性插值;
[0029]
142)根据插值的结果进行星点质心位置(x,y)和星点总能量flux的迭代求解:
[0030][0031]
r
ij
=p
ij
‑
bkg
‑
flux*epsf
ij
[0032]
其中,flux表示星点通量,r
ij
表示图像(i,j)处的像素位置的灰度值,w
ij
为像素灰度值权重分布,q
ij
=1/p
ij
,其中p
ij
为(i,j)处的像素位置的灰度值,ψ
ij
为(i,j)处的epsf值,s*为天空背景值;
[0033][0034][0035]
其中a
ij
表示对应星点窗口(i,j)位置的灰度值,bkg表示图像背景值,w
ij
表示灰度值对应的权重信息,q
ij
=1/k/a
ij
,k为探测器增益;根据上述公式计算对星点质心位置进行迭代,每次质心位置移动的距离为dx和dy,迭代若干次得到根据epsf模型拟合得到的星点质心位置,depx和depy分别为epsf值在图像两个方向的偏导值。
[0036]
本发明与现有技术相比的优点在于:
[0037]
本发明提出了一种空间目标纳米级精度成像定位方法,a)建模方法简单,容易实现,成像定位所需要的epsf模型数据可线下完成,可以满足实时性要求;b)建模数据采集方法简单,易于实现;c)依据本发明提供的psf模型,可以将星点质心定位精度提高到优于1/100pixel的水平,相比传统的质心法和高斯拟合法有明显提升。
附图说明
[0038]
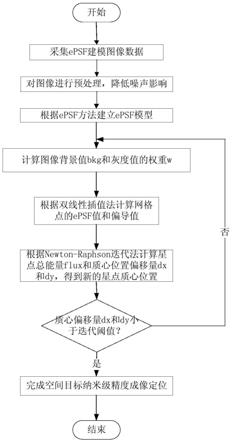
图1是空间目标纳米级精度成像定位方法实现流程图;
[0039]
图2是psf模型示意图;
[0040]
图3是仿真分析的psf模型真值(右)和epsf模型(左);
[0041]
图4是星点质心成像定位精度误差曲线;
具体实施方式
[0042]
如图1
‑
4所示,本发明一种空间目标纳米级精度成像定位方法,包括高精度全视场psf建模方法,以及空间目标成像定位方法;
[0043]
所述高精度psf建模方法的具体过程为:
[0044]
11)首先获取用于建模的m个质心位置亚像素分布不同的图像,每个位置采集n张图像;
[0045]
12)对每个位置的n张图像进行平均处理,降低探测器噪声的影响;
[0046]
13)利用平均处理的图像数据,根据epsf方法建立高精度精细化psf模型;
[0047]
所述空间目标成像定位方法的具体过程为:
[0048]
以高精度精细化psf模型为模板,基于newton_raphson方法对空间目标进行高精
度成像定位。
[0049]
精细化psf建模方法。
[0050]
首先对所有用于epsf建模的星象提取窗口图(窗口大小为n*n),获得图像模型,并在图像模型上建立psf模型,在psf模型上建立坐标系,以星象中心为原点,建立新的网格,且与图像模型中每个像素的大小相同,。将图像中多个星点图像的psf模型的零点重合,置于同一个坐标系下。
[0051]
对网格以一定的过采样系数oversampling进一步细分,获取每个格点周围一定范围内所有采样点的epsf值的集合,将集合内的平均值作为格点的epsf值。式(1)给出了epsf值与像素值的关系。
[0052][0053]
其中,为点(i
‑
x
c
,j
‑
y
c
)处的epsf值,i、j分别为uv方向像素坐标,x
c
、y
c
分别为星点质心uv方向坐标,p
ij
为(i,j)处的像素位置的灰度值,s*为天空背景值,f*为星点通量。
[0054]
利用所有格点的epsf值对所有采样点进行插值,根据每个采样点的插值结果对上一次迭代得到的epsf值求残差(第一次迭代时没有上一次epsf值作为参考,因此第一次的残差即为计算得到的epsf值本身),剔除残差大于一定范围(2.5σ)的采样点,多次迭代至没有需要剔除的采样点。
[0055]
得到所有格点的epsf值之后,对得到的epsf模型进行平滑滤波处理。
[0056]
求出星象中心坐标的偏移量之后,需要平移epsf模型以保证psf模型的准确。移动时只需要对网格进行整体移动,然后求出新的网格点的epsf值。星象中心x坐标的平移方式和偏移量由式(2)和式(3)给出,y方向的偏移和x方向具有相似的结果。
[0057][0058][0059]
其中,为星点质心x坐标值,δx
*
为星点质心x坐标值偏移量,w
ij
为像素灰度值权重分布,q
ij
=1/p
ij
,其中p
ij
为(i,j)处的像素位置的灰度值,r
ij
=p
ij
‑
s
*
‑
f
*
×
ψ
ij
,r
ij
表示图像(i,j)处的像素位置的灰度值,其中f*为星点通量,,ψ
ij
为(i,j)处的epsf值。
[0060]
经过多次迭代和平滑的过程,就可以得到一组平滑的网格点的值,完成epsf模型的建立。
[0061]
对以n*n的星点窗口,当过采样系数oversampling=n时,得到的epsf模型为(n*n)+1*(n*n)+1的二维数组,以得到的epsf模型即可进行对星点进行极高精度成像定位。
[0062]
空间目标纳米级精度成像定位
[0063]
空间目标纳米级精度成像定位方法基于epsf及其导数信息,利用newton
‑
raphson迭代法计算特定视场内星点的质心位置。
[0064]
首先根据获得的epsf模型提供的epsf及其偏导信息,对提取出来的星点窗口starwin进行newton
‑
raphson迭代,迭代方法为:
[0065][0066]
其中(x,y)为星点质心位置的迭代初值,q
11
(x1,y1),q
21
(x2,y1),q
12
(x1,y2),q
22
(x2,y2)为根据双线性差值方法计算得到的四个插值点,其中x2>x1,y2>y1;上述公式为双线性插值得到的(x,y)位置的epsf值;同样的方法对epsf的偏导信息depx和depy进行双线性插值;
[0067]
其中(x,y)为星点质心位置的迭代初值,q
11
(x1,y1),q
21
(x2,y1),q
12
(x1,y2),q
22
(x2,y2)(x2>x1,y2>y1)为根据双线性差值方法计算得到的四个插值点,上述公式为双线性插值得到的(x,y)位置的epsf值。同样的方法对epsf的偏导信息depx和depy进行双线性插值;
[0068]
根据插值的结果进行星点质心位置(x,y)和星点总能量flux的迭代求解:
[0069][0070]
r
ij
=a
ij
‑
bkg
‑
flux*epsf
ij
[0071]
其中,flux表示星点通量,r
ij
表示图像(i,j)处的像素位置的灰度值,w
ij
为像素灰度值权重分布,q
ij
=1/p
ij
,其中p
ij
为(i,j)处的像素位置的灰度值,ψ
ij
为(i,j)处的epsf值,s*为天空背景值。
[0072][0073][0074]
其中aij表示对应星点窗口(i,j)位置的灰度值,bkg表示图像背景值,wij表示灰度值对应的权重信息,qij=1/k/aij,k为探测器增益;根据上述公式计算对星点质心位置进行迭代,每次质心位置移动的距离为dx和dy,迭代若干次得到根据epsf模型拟合得到的星点质心位置,depx和depy分别为epsf值在图像两个方向的偏导值。
[0075]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
[0076]
本发明未详细说明部分属本领域技术人员公知常识。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1