一种微型高速泵空化诊断方法、装置、设备及存储介质
1.本发明涉及流体机械技术领域,尤其涉及一种微型高速泵空化诊断方法、装置、设备及存储介质。
背景技术:
2.作为重要的流体运输设备,简易微型高速离心泵越来越广泛应用于汽车、电子和医学等领域。与传统的大型离心泵相比,简易微型高速离心泵采用高转速可以有效地提高效率性能,但运行在高速下,泵内过流部件极易发生空化。空化发生以后造成泵性能下降、产生较大的振动噪声并破坏材料,影响设备运行。
3.在现有技术中,常用的空化诊断通过采集噪声、压力脉动、振动等信号来提取状态特征,往往需要大量传感器安装在泵体上来采集信号。诊断成本高,安装复杂,并且在微型高速泵上不易实现。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种微型高速泵空化诊断方法、装置、设备及存储介质,具有简洁性好、高效性和稳定性强、准确性高的优点。
5.一方面,本发明实施例提供了一种微型高速泵空化诊断方法,包括:
6.s1:获取已训练的空化诊断模型;
7.s2:从待诊断的未知运行状态的微型高速泵中获取当前运行状态下的驱动电机瞬态电流信号;
8.s3:对电流信号采用hilbert
‑
huang变换,并进行特征提取,得到特征向量;
9.s4:根据空化诊断模型对特征向量进行识别,得到空化诊断结果。
10.可选的,空化诊断模型为svm模型;获取已训练的空化诊断模型,包括:
11.s11:选择已公开若干实验采集数据作为训练样本集;训练样本集包括训练集和测试集;
12.s12:将训练集中的样本数据进行hilbert
‑
huang变换分析,并对变换后的样本数据进行特征向量提取;
13.s13:将样本数据的特征向量输入未训练的svm模型,通过交叉验证和粒子群优化算法确定svm模型参数;
14.s14:使用测试集测试svm模型,进行调整后得到已训练的svm模型。
15.可选的,将训练集中的样本数据进行hilbert
‑
huang变换分析,并对变换后的样本数据进行特征向量提取,包括:
16.s121:对输入的训练集中的样本数据原始电流信号x(t),确定该信号的局部极大值序列x
max
和局部极小值序列x
min
;
17.s122:依据x
max
和和x
min
作三次样条插值确定信号的上、下包络线以及局部均值 m(t)=(x
max
+x
min
)/2;
18.s123:将原始信号与局部均值的差记为h
1t
=x(t)
‑
m(t);
19.s124:以h
1t
代替,重复步骤(1)~(3),直到h
1t
满足imf的基本条件,令c1=h1,r1= x(t)
‑
c1,依次可得:
20.s125:对所得c
i
(t)进行hilbert变换,得到信号幅值在时间
‑
频率内的函数分布,即 hilbert时频谱:其中,h(ω,t)表示信号的hilbert时频谱,re表示取实部,a
i
(t)表示瞬时幅值,ω
i
(t)表示瞬时频率;
21.s126:对hilbert谱进行时间积分,得到hilbert边际谱:
22.s127:通过以下公式求出反应微型高速泵运行状态的特征向量:
23.ifm能量:
24.能量比p
i
,表示第i个imf分量所占所有ifm分量能量和的百分比:其中, e为所有imf分量能量和。
25.可选的,将样本数据的特征向量输入未训练的svm模型,通过交叉验证和粒子群优化算法确定svm模型参数,包括:
26.s131:设置初始化参数:初始化参数粒子种群规模、粒子维数、最大迭代次数、惯性权重最大值和最小值、指数值、加速因子初始值和迭代最终值、随机产生粒子初始位置和速度、个体极值和全局极值;
27.s132:更新每个粒子的速度和位置,计算粒子适应度值;
28.s133:将粒子的当前适应度值和粒子个体极值进行比较;若当前适应度值优于粒子个体极值,则进行替换;
29.s134:若当前粒子的适应度值优于全局极值的适应度值,则用当前粒子适应度值替换全局极值;
30.s135:若达到最大迭代次数,则输出迭代出的最优解(c,g),否则返回至步骤s132;
31.s136:将优化后的c和g利用svm模型进行训练。
32.可选的,使用测试集测试svm模型,进行调整后得到已训练的svm模型,包括:
33.使用测试集测试svm模型,确定svm模型准确率;
34.若准确率小于预设准确率,对svm模型进行调整;或,若准确率大于等于预设准确率,则得到已训练的svm模型。
35.另一方面,本发明实施例提供了一种微型高速泵空化诊断装置,包括:
36.获取单元,用于获取已训练的空化诊断模型;
37.数据采集单元,用于获取目标微型高速泵电机当前运行数据;当前运行数据包括驱动电机瞬态电流信号;
38.信号处理单元,用于对电流信号采用hilbert
‑
huang变换,并进行特征向量提取;
39.空化诊断单元,用于根据空化诊断模型对特征向量进行识别,得到空化诊断结果。
40.可选的,数据采集单元包括ni数据采集卡;
41.数据采集单元,用于通过ni数据采集卡和相匹配的数据采集程以获取微型高速泵的电机瞬时电流信号。
42.可选的,信号处理单元包括dsp信号处理器;
43.信号处理单元,用于通过预设有编写好程序的dsp信号处理器对电流信号进行 emd分解,进行hilbert变换,进行特征提取。
44.另一方面,本发明实施例提供了一种设备,设备包括处理器和存储器,存储器中存储有至少一条指令或至少一段程序,至少一条指令或至少一段程序由处理器加载并执行上述微型高速泵空化诊断方法。
45.另一方面,本发明实施例提供了一种计算机存储介质,存储介质中存储有至少一条指令或至少一段程序,至少一条指令或至少一段程序由处理器加载并执行以实现上述微型高速泵空化诊断方法。
46.本发明实施例提供的一种微型高速泵空化诊断方法、装置、设备及存储介质具有如下有益效果:
47.1、本发明微型高速泵空化诊断方法,通过微型高速泵驱动电机既有的电流信号,通过对电流信号进行特征提取,对提取的特征向量进行识别,得到空化诊断结果,不需要额外加装传感器,安装使用方便灵活;
48.2、本发明装置价格十分低廉,同时微型高速泵的运行特征信息可以实时反映在电流信号中,信息集成度高;
49.3、本发明引入粒子群优化算法对所构建的支持向量机参数进行优化,提高了模型整体的诊断正确率,缩短诊断时间。
附图说明
50.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
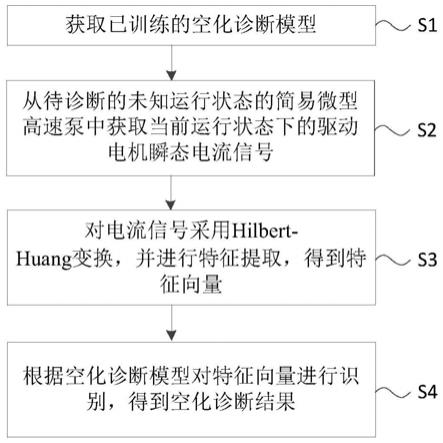
51.图1为本发明所提供的一种微型高速泵空化诊断方法流程图;
52.图2为本发明所提供的一种获取已训练的空化诊断模型的流程图;
53.图3为本发明所提供的一种hilbert
‑
huang变换流程图;
54.图4为本发明所提供的一种svm模型参数优化流程图;
55.图5为本发明所提供的一种微型高速泵空化诊断装置的示意图;
56.图6为本发明所提供的一种微型高速泵空化诊断装置的具体结构示意图;
57.图7为本发明所提供的一种微型高速泵空化诊断方法的服务器的硬件结构框图;
58.附图标记说明:
[0059]1‑
终端设备;2
‑
dsp信号处理器;3
‑
ni数据采集卡;4
‑
直流电源;5
‑
微型高速泵。
具体实施方式
[0060]
以下结合附图对本发明实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明实施例,并不用于限制本发明实施例。
[0061]
本发明考虑到微型高速泵通常采用直流电机驱动的方式,电机运行靠pwm控制,当微型高速泵运行状态发生变化时常反映在负载变化,进而影响电机的转速扰动和电流变化,因而,通过检测直流电机的电流变化,并做系列处理,进而可以判断出是否出现空化故
障。
[0062]
本发明实施例提供的一种微型高速泵空化诊断方法,如图1所示,包括以下步骤:
[0063]
s1:获取已训练的空化诊断模型;
[0064]
s2:从待诊断的未知运行状态的微型高速泵中获取当前运行状态下的驱动电机瞬态电流信号;
[0065]
s3:对电流信号采用hilbert
‑
huang变换,并进行特征提取,得到特征向量;
[0066]
s4:根据空化诊断模型对特征向量进行识别,得到空化诊断结果。
[0067]
本发明实施例中,通过上述步骤s1
‑
s4,根据微型高速泵运行时电机电流信号,通过对电流信号进行特征向量提取,通过空化诊断模型对特征向量进行分类,得到特征向量所属类别对应的空化状态。本发明可以有效分析微型高速泵运行趋势,提前预测设备性能状况,有助于及时发现和更正隐患。
[0068]
一种可选的实施方式中,空化诊断模型可以是svm模型;对应的,如图2所示,上述步骤s1可以包括:
[0069]
s11:选择已公开若干实验采集数据作为训练样本集;训练样本集包括训练集和测试集;
[0070]
s12:将训练集中的样本数据进行hilbert
‑
huang变换分析,并对变换后的样本数据进行特征向量提取;
[0071]
s13:将样本数据的特征向量输入未训练的svm模型,通过交叉验证和粒子群优化算法确定svm模型参数;
[0072]
s14:使用测试集测试svm模型,进行调整后得到已训练的svm模型;
[0073]
上述步骤s11中,选择已公开若干实验采集数据作为训练样本集,训练样本集分为训练集和测试集;具体的,实验采集数据包括微型高速泵运行状态下不同空化类型以及在对应空化状态下驱动电机的瞬态电流信号;所述微型高速泵空化类型包括:亚空化(液体内部或液固交界面上没有空泡)、临界空化(液固交界面上开始出现空泡)、局部空化(固体局部边界面上和邻近液体内部出现空泡)和超空化(固体整个边界面上和靠近固体尾端的液体中都出现空泡)。
[0074]
一种具体的实施方式中,如图3所示,步骤s12可以包括:
[0075]
s121:对输入的训练集中的样本数据原始电流信号x(t),确定该信号的局部极大值序列x
max
和局部极小值序列x
min
;
[0076]
s122:依据x
max
和和x
min
作三次样条插值确定信号的上、下包络线以及局部均值 m(t)=(x
max
+x
min
)/2;
[0077]
s123:将原始信号与局部均值的差记为h
1t
=x(t)
‑
m(t);
[0078]
该实施方式中,考虑到由于非线性非平稳信号中非对称波的存在,m(t)并非真实的局部均值。因此,执行下述步骤s124;
[0079]
s124:以h
1t
代替,重复步骤(1)~(3),直到h
1t
满足imf的基本条件,令c1=h1,r1= x(t)
‑
c1,依次可得:
[0080]
s125:对所得c
i
(t)进行hilbert变换,得到信号幅值在时间
‑
频率内的函数分布,即 hilbert时频谱:其中,h(ω,t)表示信号的hilbert时
频谱,re表示取实部,a
i
(t)表示瞬时幅值,ω
i
(t)表示瞬时频率;
[0081]
s126:对hilbert谱进行时间积分,得到hilbert边际谱:
[0082]
s127:通过以下公式求出反应微型高速泵运行状态的特征向量:
[0083]
ifm能量:
[0084]
能量比p
i
,表示第i个imf分量所占所有ifm分量能量和的百分比:其中, e为所有imf分量能量和。
[0085]
一种具体的实施方式中,svm模型参数可以包括惩罚因子c和核参数g,如图4所示,步骤s13可以包括:
[0086]
s131:设置初始化参数:初始化参数粒子种群规模、粒子维数、最大迭代次数、惯性权重最大值和最小值、指数值、加速因子初始值和迭代最终值、随机产生粒子初始位置和速度、个体极值和全局极值;
[0087]
s132:更新每个粒子的速度和位置,计算粒子适应度值;
[0088]
s133:将粒子的当前适应度值和粒子个体极值进行比较;若当前适应度值优于粒子个体极值,则进行替换;
[0089]
s134:若当前粒子的适应度值优于全局极值的适应度值,则用当前粒子适应度值替换全局极值;
[0090]
s135:若达到最大迭代次数,则输出迭代出的最优解(c,g),否则返回至步骤s132;
[0091]
s136:将优化后的c和g利用svm模型进行训练。
[0092]
本发明通过引入粒子群优化算法对所构建的支持向量机参数进行优化,提高了模型整体的诊断正确率,缩短诊断时间。
[0093]
一种具体的步骤s14的实施方式中,使用测试集测试svm模型,看是否达到预期的准确率,如若没有就继续调整svm模型,直至达到预期准确率,则获得已训练的svm 模型。其中,预期的准确率可以是90%。
[0094]
本发明实施例还提供一种微型高速泵空化诊断装置,如图5所示,包括:
[0095]
获取单元501,用于获取已训练的空化诊断模型;
[0096]
数据采集单元502,用于获取目标微型高速泵电机当前运行数据;所述当前运行数据包括驱动电机瞬态电流信号;
[0097]
信号处理单元503,用于对所述电流信号采用hilbert
‑
huang变换,并进行特征向量提取;
[0098]
空化诊断单元504,用于根据空化诊断模型对特征向量进行识别,得到空化诊断结果。
[0099]
本发明实施例中,如图6所示,数据采集单元502包括ni数据采集卡3,通过ni 数据采集卡3和相匹配的数据采集程序来实现获取微型高速泵的电机瞬时电流信号。
[0100]
本发明实施例中,如图6所示,信号处理单元503包括dsp信号处理器2,通过预设有编写好程序的dsp信号处理器2来处理和分析信号,dsp信号处理器2对所述数据采集单元502传递过来的电机电流信号先进行emd分解,再进行hilbert变换,最后进行特征向量提取。
[0101]
本发明实施例中,空化诊断单元504通过matlab数据处理程序实现对输入电流信
号的特征向量进行空化诊断。
[0102]
本发明实施例中,如图6所示,微型高速泵空化诊断装置还包括一台终端设备1,终端设备1上存储有数据采集单元502、信号处理单元503及空化诊断单元504所需要的程序。可选的,终端设备1可以是桌上型计算机、笔记本、掌上电脑及云端服务器等计算设备。
[0103]
本发明实施例中,直流电源4两端分别与微型高速泵5和ni数据采集卡3相连, ni数据采集卡3另一端与dsp信号处理器2相连,dsp信号处理器2另一端与装有信号处理程序的终端设备1相连。
[0104]
本发明装置价格十分低廉,微型高速泵的运行特征信息可以实时反映在电流信号中,信息集成度高。
[0105]
本发明实施例中的装置与方法实施例基于同样地申请构思。
[0106]
本发明实施例所提供的方法实施例可以在计算机终端、服务器或者类似的运算装置中执行。以运行在服务器上为例,图7是本发明实施例提供的一种微型高速泵空化诊断方法的服务器的硬件结构框图。如图7所示,该服务器700可因配置或性能不同而产生比较大的差异,可以包括一个或一个以上中央处理器(central processing units,cpu) 710(处理器710可以包括但不限于微处理器ncu或可编程逻辑器件fpga等的处理装置)、用于存储数据的存储器730,一个或一个以上存储应用程序723或数据722的存储介质720(例如一个或一个以上海量存储设备)。其中,存储器730和存储介质720 可以是短暂存储或持久存储。存储在存储介质720的程序可以包括一个或一个以上模块,每个模块可以包括对服务器中的一系列指令操作。更进一步地,中央处理器710可以设置为与存储介质720通信,在服务器700上执行存储介质720中的一系列指令操作。服务器700还可以包括一个或一个以上电源760,一个或一个以上有线或无线网络接口 750,一个或一个以上输入输出接口740,和/或,一个或一个以上操作系统721,例如 windows,mac os,unix,linux,freebsd等等。
[0107]
输入输出接口740可以用于经由一个网络接收或者发送数据。上述的网络具体实例可包括服务器700的通信供应商提供的无线网络。在一个实例中,输入输出接口740包括一个网络适配器(network interface controller,nic),其可通过基站与其他网络设备相连从而可与互联网进行通讯。在一个实例中,输入输出接口740可以为射频(radio frequency,rf)模块,其用于通过无线方式与互联网进行通讯。
[0108]
本领域普通技术人员可以理解,图7所示的结构仅为示意,其并不对上述电子装置的结构造成限定。例如,服务器700还可包括比图7中所示更多或者更少的组件,或者具有与图7所示不同的配置。
[0109]
本发明的实施例还提供了一种存储介质,所述存储介质可设置于服务器之中以保存用于实现方法实施例中一种微型高速泵空化诊断方法相关的至少一条指令、至少一段程序、代码集或指令集,该至少一条指令、该至少一段程序、该代码集或指令集由该处理器加载并执行以实现上述微型高速泵空化诊断方法。
[0110]
可选地,在本实施例中,上述存储介质可以位于计算机网络的多个网络服务器中的至少一个网络服务器。可选地,在本实施例中,上述存储介质可以包括但不限于:u盘、只读存储器(rom,read
‑
only memory)、随机存取存储器(ram,random access memory)、移动硬盘、磁碟或者光盘等各种可以存储程序代码的介质。
[0111]
本发明实施例中,所述作为分离部件说明的单元可以是或者也可以不是物理上分
开的,作为单元显示的部件可以是或者也可以不是物理单元,可以位于一个地方,也可以分布到多个单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0112]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1