一种深海Argo浮标能耗参数灵敏度分析方法与流程
一种深海argo浮标能耗参数灵敏度分析方法
技术领域
1.本发明属于深海浮标的能耗控制技术领域,具体涉及一种深海argo浮标能耗参数灵敏度分析方法。
背景技术:
2.argo浮标是一种可以在海洋中自由漂移,以净浮力为驱动力完成下潜、上浮剖面运动,并基于搭载的传感器采集海水温度、电导率(盐度)和压力等参数的自主水下航行器。argo浮标具有能耗低,续航能力强,探测范围广,原理简单,噪声低等优点,已成为一种重要的海洋观测平台。
3.深海argo浮标将argo剖面浮标的探测范围扩大到海底,并能准确测量深海区域海水参数的变化。与其他自主水下航行器一样,深海argo浮标的性能也受到能源问题的制约。ifremer开发的新型深海deep
‑
arvor剖面浮标将当前作业深度延伸至4000米,海上试验的结果表明,浮标可以以每两天为一个剖面周期工作9个月。深海argo剖面浮标的能量来源于携带的一次性或可充电电池。由于深海argo浮标的体积和有效搭载能力有限,导致携带的电池数量有限,限制了深海argo浮标的工作时间,且其工作环境复杂,更换电池或进行充电极为不便,低功耗技术已成为自主水下航行器的研究热点。因此,有必要提出一种深海argo浮标能耗参数灵敏度分析方法,在深海argo浮标的设计优化过程中,分析决定浮标单剖面能耗的主要参数,降低浮标剖面运动的功耗,提高深海argo浮标的续航能力。
技术实现要素:
4.本发明为解决现有技术中存在的缺陷,提出一种深海argo浮标能耗参数灵敏度分析方法,基于得到的各参数对浮标单剖面能耗的影响程度,为前期浮标设计中降低浮标能耗、提高浮标续航能力提供基础和参考,并为后期优化指明优化方向。
5.本发明是采用以下的技术方案实现的:一种深海argo浮标能耗参数灵敏度分析方法,包括以下步骤:
6.步骤1、确定深海argo浮标单剖面工作流程及对应各子系统的运行状态;
7.步骤2、建立深海argo浮标在垂直面内的稳态运行模型,即基于动量定理和动力学定律,确定深海argo浮标在垂直面的平衡方程;
8.步骤3、建立深海argo浮标单剖面能耗模型:建立浮力调节系统能耗模型、通讯和定位单元能耗模型以及传感器与主控板的总功耗模型,并将其综合得到浮标单剖面能耗模型;
9.步骤4、根据所构建的浮标单剖面能耗模型确定常量参数和非常量参数;
10.步骤5、根据步骤4确定的常量参数和非常量参数确定进行灵敏度分析的参数及分布方式;
11.步骤6、基于所构建的单剖面能耗模型和所确定的参数进行能耗参数灵敏度分析。
12.进一步的,所述步骤1中,单剖面工作流程包括数据传输与定位阶段、准备下潜阶
段、下潜阶段、准备上浮阶段、上浮阶段以及准备下一个剖面运动阶段;argo浮标各子系统包括浮力调节系统、通讯和定位单元、主控板、全程开启传感器以及深度控制传感器,各子系统的运行状态包括开启和关闭两种状态:
13.数据传输与定位阶段:浮力调节系统关闭,通讯和定位单元开启,主控板开启,全程开启传感器关闭,深度控制传感器关闭;
14.准备下潜阶段:浮力调节系统开启,通讯和定位单元关闭,主控板开启,全程开启传感器开启,深度控制传感器关闭;
15.下潜阶段:浮力调节系统关闭,通讯和定位单元关闭,主控板开启,全程开启传感器开启,深度控制传感器开启;
16.准备上浮阶段:浮力调节系统开启,通讯和定位单元关闭,主控板开启,全程开启传感器开启,深度控制传感器关闭;
17.上浮阶段:浮力调节系统关闭,通讯和定位单元关闭,主控板开启,全程开启传感器开启,深度控制传感器开启;
18.准备下一个剖面运动阶段:浮力调节系统关闭,通讯和定位单元开启,主控板开启,全程开启传感器开启,深度控制传感器关闭。
19.进一步的,所述步骤2中深海argo浮标在垂直面的平衡方程为:
[0020][0021][0022]
(m
f3
‑
m
f1
)v1v3+m
dl2
+(m
e
r
e
‑
m
w
r
w
‑
m
b1
r
b1
‑
m
b2
r
b2
)g sinθ
[0023]
‑
m
s
gr
s
sin(ω
‑
θ)=0
ꢀꢀꢀꢀ
(3)
[0024]
其中,为浮标的净浮力质量,θ为浮标俯仰角,α为浮标攻角,ω为温盐深传感器的位置角,l为浮标所受的升力,d为浮标所受的阻力,m
f1
和m
f3
为广义附加质量矩阵中的量,v1和v3为浮标在机体坐标系中的平移线速度,m
dl2
为速度坐标系下的水动力矩,m
e
为能源模块质量,m
w
为配平质量,m
b1
为内油囊质量,m
b2
为外油囊质量,m
s
为温盐深传感器质量,r
e
为能源模块质心在机体坐标系中的矢量表达,r
w
为配平质量质心在机体坐标系中的矢量表达,r
b1
为内油囊质心在机体坐标系中的矢量表达,r
b2
为外油囊质心在机体坐标系中的矢量表达,r
s
为温盐深传感器质心在机体坐标系中的矢量表达。
[0025]
进一步的,所述步骤3中,建立深海argo浮标单剖面能耗模型q如下:
[0026][0027]
其中,q
n
为浮力调节系统的总功耗,q
f
为通讯和定位单元的能耗,q
t
为传感器与主控板的总功耗,k
l0
,k
l
,k
d0
,k
d
为水动力系数,p
hydra0
为浮标在海面回油时液压系统的功率,q
pump0
为浮标在海面回油时柱塞泵的流量,h为浮标的下潜深度,p
hydra
(h)为浮标在工作深度打油时液压系统的功率,q
pumph
为浮标在工作深度打油时柱塞泵的流量,t
f
为通信与定位时间,p
f
为通信与定位单元运行时的平均功率,全程开启的传感器平均功率和记为p
t1
,设浮标
共搭载j个深度控制的传感器,δh
i
为第i个传感器两次运行之间的深度间隔,δt
i
为第i个传感器单个周期的运行时间,p
si
为第i个传感器运行时的平均功率,v为航行速度,ξ为滑翔角。
[0028]
进一步的,所述步骤3中,在浮标的一个剖面内,浮力调节系统的总功耗为:
[0029]
q
n
=p
hydra0
·
t1+p
hydra
(h)
·
t2ꢀꢀ
(5)
[0030]
其中,t1为浮标在下潜准备阶段液压系统工作的时间,且有t2为浮标在上浮准备阶段液压系统工作的时间,且有δv为浮标体积的变化量,则式(5)写为:
[0031][0032]
基于式(1)(2)及浮标净浮力与体积变化量的关系ρ
water
为海水密度,进一步可得:
[0033][0034]
进一步的,所述步骤3中,t
f
为通信与定位时间,p
f
为通信与定位单元运行时的平均功率,则单剖面通讯和定位单元的功耗为:
[0035]
q
f
=p
f
t
f
。
ꢀꢀ
(8)
[0036]
进一步的,所述步骤3中传感器与主控板的总功耗通过以下方式获得:
[0037]
全程开启的传感器平均功率和记为p
t1
,运行时间为t2,则单剖面内该部分能耗:
[0038][0039]
设浮标共搭载j个深度控制的传感器,δh
i
为第i个传感器两次运行之间的深度间隔,δt
i
为第i个传感器单个周期的运行时间,p
si
为第i个传感器运行时的平均功率,得到深度控制的传感器在单剖面内的总能耗为:
[0040][0041]
设主控板平均功率为p
t3
,运行时间为(t2+t
f
),则该部分功耗:
[0042][0043]
进而得到传感器与主控板的总功耗:
[0044][0045]
进一步的,所述步骤4中,常量参数包括全程开启的传感器平均功率p
t1
,主控板平均功率p
t3
,通信与定位单元平均功率p
f
,高度计运行时的平均功率p
s1
,海水密度ρ
water
和重力加速度g,非常量参数包括液压系统参数,浮标耐压壳体水动力系数,航行参数,通信与定位时间t
f
,深度控制的传感器开启深度间隔δh
i
与运行时间δt
i
;
[0046]
在确定液压系统参数时,利用液压仿真软件amesim开展仿真分析,获取浮力调节系统在不同工作压力下的打油功率随海水深度变化规律:
[0047]
p
hydra
(h)=7.08h2+4.36h+11.96
ꢀꢀꢀꢀ
(14)
[0048]
通过仿真分析获得液压系统在不同工作压力下的流量;
[0049]
在确定浮标耐压壳体水动力系数时,在fluent软件中,利用cfd数值计算方法计算浮标定常运动时的阻力、升力与力矩,并在matlab中利用最小二乘法得到浮标定常运动时的水动力系数;
[0050]
所述航行参数包括航行速度v,滑翔角ξ和下潜深度h;通信与定位时间t
f
根据数据传输速度和单剖面采集的数据量确定。
[0051]
进一步的,所述步骤5中,所确定的灵敏度分析的参数包括水动力系数k
d0
,水动力系数k
d
,水动力系数k
l0
,水动力系数k
l
,航行速度v,滑翔角ξ,下潜深度h,通信与定位时间t
f
,高度计开启深度间隔δh1和高度计运行时间δt1,其分布方式均为均匀分布。
[0052]
进一步的,所述步骤6中,基于sobol’方法进行能耗参数灵敏度分析,基于步骤5所确定的10个确定的灵敏度分析参数作为输入,得到argo单剖面能耗模型的一阶灵敏度系数和总灵敏度系数均值,并按总灵敏度系数大小顺序排列,得到深海argo浮标单剖面能耗参数的一阶灵敏度系数和总灵敏度系数均值。
[0053]
与现有技术相比,本发明的优点和积极效果在于:
[0054]
本方案通过建立深海argo浮标的单剖面能耗模型,并基于sobol’全局灵敏度分析方法计算单剖面能耗参数的一阶灵敏度系数和总灵敏度系数,得到各参数对浮标单剖面能耗的影响程度,为设计人员在前期浮标设计与后期优化过程中降低浮标能耗,提高浮标续航能力提供了基础和参考,并指明了优化方向;同时对于其他类似欠驱动水下航行器的能耗优化也具有一定的指导意义。
附图说明
[0055]
图1为本发明实施例所述分析方法流程示意图;
[0056]
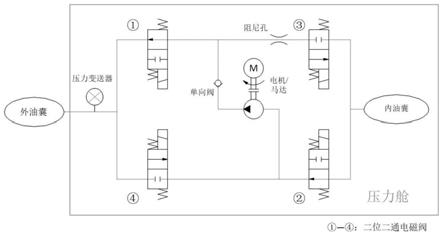
图2为深海argo浮标液压原理示意图;
[0057]
图3为单剖面能耗参数的一阶灵敏度系数和总灵敏度系数均值示意图。
具体实施方式
[0058]
为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图及实施例对本发明做进一步说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用不同于在此描述的其他方式来实施,因此,本发明并不限于下面公开的具体实施例。
[0059]
实施例,本方案提出一种深海argo浮标能耗参数灵敏度分析方法,如图1所示,为深海argo浮标能耗参数灵敏度分析方法的流程图,包括以下步骤:
[0060]
步骤1、确定深海argo浮标单剖面工作流程及各子系统运行状态;
[0061]
步骤2、建立深海argo浮标在垂直面内的稳态运行模型;
[0062]
步骤3、建立深海argo浮标单剖面能耗模型;
[0063]
步骤4、确定常量参数和非常量参数;
[0064]
步骤5、确定进行灵敏度分析的参数及分布方式;
[0065]
步骤6、基于sobol’方法开展能耗参数灵敏度分析。
[0066]
具体的,下面对本方案做详细的介绍:
[0067]
步骤1中,在确定深海argo浮标单剖面工作流程及各子系统运行状态时,具体通过
以下方式确定:
[0068]
(1)本实施例所述argo浮标的一个剖面运动流程主要包括数据传输并接受指令、液压回油准备下潜、下潜、液压打油准备上浮、上浮等多个阶段。实际上,典型的argo浮标剖面运动包括悬停阶段,本实例的argo浮标在悬停阶段处于待机状态,能耗可忽略不计,因此从能耗分析角度的来看,悬停阶段被忽略;
[0069]
(2)浮标入水后进行数据传输与指令接收,动作结束后,浮标在海面回油,外油囊体积减小,浮标的净浮力方向向下并开始下潜,当压力变送器检测到浮标到达下潜深度时,伺服电机驱动柱塞泵将液压油从内油囊打到外油囊,外油囊体积增大,浮标净浮力方向向上并开始上浮,在上浮的过程中ctd进行数据采集,当浮标到达水面后完成一个剖面运动,并开始准备下一个剖面运动;
[0070]
(3)深海argo浮标各子系统主要包括:浮力调节系统、通讯和定位单元、主控板、全程开启的传感器以及深度控制的传感器,各子系统在一个剖面运动周期内的运动状态如表1所示。
[0071]
表1浮标各子系统在一个运动周期内的运行状态
[0072][0073]
步骤2:建立深海argo浮标在垂直面内的稳态运行模型;
[0074]
(1)基于动量定理和动力学定律,确定深海argo浮标在垂直面的平衡方程为:
[0075][0076][0077]
(m
f3
‑
m
f1
)v1v3+m
dl2
+(m
e
r
e
‑
m
w
r
w
‑
m
b1
r
b1
‑
m
b2
r
b2
)g sinθ
[0078]
‑
m
s
gr
s
sin(ω
‑
θ)=0
ꢀꢀꢀꢀ
(3)
[0079]
其中,本实例定义:为浮标的净浮力质量,θ为浮标俯仰角,α为浮标攻角,ω为外置传感器的位置角,l为浮标所受的升力,d为浮标所受的阻力,流体动力学中一般用非粘性水动力表征浮标带动其周围的流体运动时所需要的能量,因此用附加质量的形式表征非粘性水动力并借鉴sname记号法以定义浮标的广义附加质量矩阵,其中,m
f1
和m
f3
为所定义的广义附加质量矩阵中的量,v1和v3为浮标在机体坐标系中的平移线速度,m
dl2
为速度坐标系下的水动力矩,m
e
为能源模块质量,m
w
为配平质量,m
b1
为内油囊质量,m
b2
为外油囊质量,m
s
为
外置传感器质量,r
e
为能源模块质心在机体坐标系中的矢量表达,r
w
为配平质量质心在机体坐标系中的矢量表达,r
b1
为内油囊质心在机体坐标系中的矢量表达,r
b2
为外油囊质心在机体坐标系中的矢量表达,r
s
为外置传感器质心在机体坐标系中的矢量表达。
[0080]
定义滑翔角ξ=θ
‑
α及浮标所受的阻力d=(k
d0
+k
d
α2)v2,并基于式(1)(2)推导,可得在稳定状态下:
[0081][0082]
由式(4)可知,攻角α是关于滑翔角ξ和水动力系数k
l0
,k
l
,k
d0
,k
d
的函数。
[0083]
步骤3:建立深海argo浮标单剖面能耗模型:
[0084]
(1)建立浮力调节系统能耗模型:浮力调节系统的功耗主要包括驱动伺服电机以及电磁阀启闭时的功耗,主要包括两个浮力调节阶段,一是下潜准备阶段,浮标在海面时液压系统回油,浮标开始下潜,二是到达指定深度时的上潜准备阶段,伺服电机驱动柱塞泵将液压油从内油囊打到外油囊,浮标开始上浮。本浮标的液压原理图如图2所示,在浮标的一个剖面内,浮力调节系统的总功耗为:
[0085]
q
n
=p
hydra0
·
t1+p
hydra
(h)
·
t2ꢀꢀꢀꢀ
(5)
[0086]
其中,t1为浮标在下潜准备阶段液压系统工作的时间,且有t2为浮标在上浮准备阶段液压系统工作的时间,且有δv为浮标体积的变化量,则式(5)可写作:
[0087][0088]
其中,
[0089]
h为浮标的下潜深度;
[0090]
p
hydra0
为浮标在海面回油时液压系统的功率;
[0091]
q
pump0
为浮标在海面回油时柱塞泵的流量;
[0092]
p
hydra
(h)为浮标在工作深度打油时液压系统的功率;
[0093]
q
pumph
为浮标在工作深度打油时柱塞泵的流量;
[0094]
基于式(1)(2)及浮标净浮力与体积变化量的关系(p
water
为海水密度),进一步推导可得:
[0095][0096]
(2)建立通讯和定位单元的能耗模型:浮标在通讯和定位阶段的能耗只与相关电子设备运行时的功率和运行时间有关,卫星信号强度由于受天气等因素的影响具有很大的不确定性,且操作人员会根据实时任务需求对浮标下发指令,导致通信与定位时间具有一定的随机性,设t
f
为通信与定位时间,p
f
为通信与定位单元运行时的平均功率,则单剖面通讯和定位单元的功耗为:
[0097]
q
f
=p
f
t
f
ꢀꢀ
(8)
[0098]
(3)建立全程开启的传感器的能耗模型:本浮标全程开启的传感器包括压力变送器全程监测深度变化,直线位移传感器全程开启监测外油囊的体积,漏液监测传感器全程
开启监测壳体是否漏水,按照国际argo组织的规范,温、盐、深传感器(ctd)仅在上浮阶段开启采集数据,但为简化计算,将ctd纳入全程开启的传感器,但在计算时其平均功率减半。将全程开启的传感器平均功率和记为p
t1
,运行时间为t2,则单剖面内该部分能耗:
[0099][0100]
(4)建立深度控制的传感器的能耗模型:深度控制的传感器根据测量要求,间隔一定的深度运行一段时间,可在完成测量要求的前提下节省能耗。设浮标共搭载j个深度控制的传感器,δh
i
为第i个传感器两次运行之间的深度间隔,δt
i
为第i个传感器单个周期的运行时间,p
si
为第i个传感器运行时的平均功率,可得深度控制的传感器在单剖面内的总能耗为:
[0101][0102]
(5)建立主控板能耗模型:主控板在浮标的整个剖面运动周期中一直保持开启的状态,包括剖面运动以及通信与定位的时间,设该部分的平均功率为p
t3
,运行时间为(t2+t
f
),则该部分功耗:
[0103][0104]
(6)传感器与主控板的总功耗:
[0105][0106]
(7)基于各子系统能耗模型,可得深海argo浮标单剖面能耗模型:
[0107][0108]
步骤4:确定常量参数和非常量参数:
[0109]
(1)部分参数在浮标设计时便已确定,可记为常量,见表2:
[0110]
表2浮标系统确定的常量参数值
[0111][0112][0113]
(2)确定非常量参数(确定不确定参数)
[0114]
1)某些参数在设计时不是已知的,且部分变量会随浮标运行环境的改变呈现出一
定的变化规律,因此需要通过实验或者仿真求得。
[0115]
2)液压系统参数的确定:利用液压仿真软件amesim开展仿真分析,获取浮力调节系统在不同工作压力下的打油功率随海水深度变化规律:
[0116]
p
hydra
(h)=7.08h2+4.36h+11.96
ꢀꢀꢀꢀ
(14)
[0117]
通过仿真分析获得液压系统在不同工作压力下的流量:液压系统在不同工作压力下以800r/min的转速打油时,流量q
pumph
稳定在0.06l/min;柱塞泵在1500r/min的转速下回油时泵的流量q
pump0
约为0.119l/min。
[0118]
3)浮标耐压壳体水动力系数的确定
[0119]
在fluent软件中,利用cfd数值计算方法计算了在攻角分别为0
°
,2
°
,4
°
,航行速度分别在0.1m/s,0.3m/s,0.5m/s下,浮标定常运动时的阻力、升力与力矩,在matlab中利用最小二乘法得到浮标定常运动时的水动力系数,结果可见表3:
[0120]
表3粘性水动力系数计算结果
[0121][0122]
4)航行参数的确定,包括:
[0123]
航行速度v:deep
‑
solo型浮标稳定状态下的速度约为0.6m/s,deep
‑
solo 2型浮标稳定状态下的速度约为0.12m/s,arvor
‑
c型浮标稳定状态下的速度约为0.15
‑
0.20m/s。因此规定本浮标在稳定状态下速度为0.05
‑
0.20m/s,且在此区间内服从均匀分布。
[0124]
滑翔角ξ:经式(1)(2)推导计算,浮标滑翔角的范围为:(
‑
7.76
°
,0)∪(0,7.51
°
)。在洋流速度一定的情况下,浮标的滑翔角在上述范围内均匀分布。
[0125]
下潜深度h:下潜深度由操作人员根据实际的工作需求确定,本浮标的工作范围为0~4000m,h在此范围内服从均匀分布。
[0126]
5)通信与定位时间t
f
[0127]
由于卫星信号强度的不确定性和实际的通信需求,浮标的通信与定位时间具有一定的随机性,根据数据传输速度和单剖面采集的数据量,t
f
为600s~1200s,在该范围内为均匀分布。
[0128]
6)深度控制的传感器开启深度间隔δh
i
与运行时间δt
i
[0129]
本浮标搭载的深度控制的传感器只有防止浮标触底的高度计,开启深度间隔最少为0,高度计全程开启会大大增加能耗;开启深度间隔过大易造成浮标触底,综合考虑浮标的下潜速度与浮力调节速度,认为高度计开启深度间隔δh1在0~50m之间服从均匀分布。
[0130]
高度计单次运行时间δt1过短会造成误判致使浮标触底,运行时间过长会增加功耗,综合考虑浮标的垂直下潜速度以及高度计安装位置,高度计的单次运行时间δt1在2~10s内服从均匀分布。
[0131]
步骤5:确定进行灵敏度分析的参数及分布方式
[0132]
(1)由于实例建立的能耗与航程模型较为复杂,不可能对每一个参数进行灵敏度分析,且部分参数为常量,因此只选取一部分研究人员更为关心的参数进行灵敏度分析。
[0133]
(2)水动力系数k
d0
,k
d
,k
l0
,k
l
是衡量浮标水动力性能的重要参数,因此水动力系数的变化对于浮标的能耗与航程有着非常重要的影响,需要进行灵敏度分析。在设计时各水
动力系数可较样机上下波动20%,并服从均匀分布。
[0134]
(3)高度计开启深度间隔δh
i
与单次运行时间δt
i
对浮标的能耗与航程以及触底判断有重要的影响,需要进行灵敏度分析。通讯和定位单元的平均功率p
f
视为一定值,但是通讯和定位时间t
f
受环境、数据量等因素影响较大,导致其变化范围较大,无法视为常量,因此要对其进行灵敏度分析。
[0135]
(4)航行参数是操作人员需要直接或者间接设定的量,对于浮标的能耗与航程有非常重要的影响,本实例对滑翔角ξ,速度v,下潜深度h三个量进行灵敏度分析。
[0136]
(5)综上分析,10个需要进行灵敏度分析的参数的取值范围与分布方式已确定,见表4。
[0137]
表4进行灵敏度分析的参数及分布方式
[0138][0139][0140]
步骤6:基于sobol’方法开展能耗参数灵敏度分析
[0141]
(1)灵敏度分析是指定性或定量地研究模型输入的不确定性对模型输出不确定性的影响,可用于确定模型的各参数对输出结果影响的大小,有利于后期的模型校正。基于方差的sobol’方法因其适用于非线性、多输入变量及稳定性强的特点,近年来在包括海洋工程在内的众多领域得到了广泛应用,由于该方法适用于本文建立的浮标能耗和航程模型,因此选择sobol’方法进行全局灵敏度分析。
[0142]
(2)输入变量个数m=10,经过测试,取样次数n=9600时可保证结果稳定,评估总数n=115200,试验在配置为2.80ghz i7
‑
7700hq 16gb ram的电脑中进行,使用软件为matlab 2019awith safe toolbox,总共耗时150s。
[0143]
(3)得到上述10个参数对于argo单剖面能耗模型的一阶灵敏度系数和总灵敏度系数均值,并按总灵敏度系数大小顺序排列,得到图3所示的深海argo浮标单剖面能耗参数的一阶灵敏度系数和总灵敏度系数均值。
[0144]
结果分析:
[0145]
在深海argo浮标正常工作范围内,浮标的单剖面能耗参数中的滑翔角ξ,下潜深度h和航行速度v的一阶灵敏度系数和总灵敏度系数均较大,表明这三个参数对浮标的单剖面能耗影响较大。其中,航行速度v决定浮标受到的阻力,从而决定浮标浮力调节系统的输出功率,滑翔角ξ与下潜深度h决定浮标的航行时间,分析结果与实际工作状况较符合。其他参数的灵敏度系数均较小,说明其对单剖面能耗及航程的影响可忽略不计。
[0146]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1