反推蜗壳的二维气动型面设计方法与流程
1.本技术主要涉及发动机试验技术领域,尤其涉及一种反推蜗壳的二维气动型面设计方法。
背景技术:
2.近年来,随着国产大涵道比涡扇发动机的加速研制,发动机试验任务日益增多,其中发动机反推试验是为了验证发动机的反推功能是否满足适航标准,是发动机型号性能验证的重要试验之一。当发动机在室内试车台进行反推试验时,由于反推气流的出射方向与主流相反,有可能被正在试验的发动机重新吸入,这会导致发动机额外的振动或超温现象,这不利于反推试验的正常进行,也会带来安全隐患,因此需要设计反推蜗壳将反推气流导至发动机后方排出。
3.反推蜗壳是一种反推试验时需要的防发动机再吸入反推气流的装置。反推蜗壳的气动型面应满足:对发动机反推出口背压影响小、泄漏量小、排气顺畅这三个特点,因此在气动型面设计时需要进行大量的造型验证和优化,并且由于反推蜗壳在一定周向范围内有轴对称的特性,因此构造一种反推蜗壳二维气动型面设计方法是十分必要的。
4.根据反推试验要求,反推蜗壳二维气动型面设计方法应解决以下问题:
5.1.在短时间内构造出气动性能相对较好的气动型面,这有利于后期对验证结果的择优选择;
6.2.设计得到的反推蜗壳气动型面需要量化表征,这有利于气动设计优化;
7.3.设计方法应满足不同气流角度下的型面设计;
8.4.设计方法应适用于不同试车台。
技术实现要素:
9.本技术要解决的技术问题是提供一种反推蜗壳的二维气动型面设计方法,能够在短时间内构造出气动性能较好的气动型面,气动型面为量化表征,满足不同气流角度下的型面设计,并且适用于不同试车台。
10.为解决上述技术问题,本技术提供了一种反推蜗壳的二维气动型面设计方法,反推蜗壳具有二维内侧气动型面和二维外侧气动型面,所述方法包括:获取反推气流出口宽度、反推气流径向速度、反推气流总压、反推气流轴向速度和反推气流未紊乱时的高度;基于所述反推气流径向速度和所述反推气流轴向速度计算第一方向参数、第二方向参数和第三方向参数;基于所述第一方向参数、所述反推气流出口宽度和所述反推气流未紊乱时的高度确定第一特征点;基于所述反推气流总压、所述第一特征点、所述第一方向参数、所述第二方向参数和所述第三方向参数确定第二特征点、第三特征点和第四特征点;基于所述第一特征点、所述第二特征点、所述第三特征点和所述第四特征点,根据四阶贝塞尔曲线确定所述二维内侧气动型面;以及基于所述二维内侧气动型面和所述反推气流出口宽度确定所述二维外侧气动型面。
11.在本技术的一实施例中,所述第一方向参数通过以下方式计算:
[0012][0013]
其中,t1为所述第一方向参数,vr为所述反推气流径向速度,va为所述反推气流轴向速度;
[0014]
所述第二方向参数通过以下方式计算:
[0015]
t2=tan(a+arctant1)
[0016]
其中,t1为所述第一方向参数,t2为所述第二方向参数,a为预设的第一系数;
[0017]
所述第三方向参数通过以下方式计算:
[0018]
t3=tan(arctant
2-b)
[0019]
其中,t2为所述第二方向参数,t3为所述第三方向参数,b为预设的第二系数。
[0020]
在本技术的一实施例中,所述第一特征点通过以下方式计算:
[0021][0022]
p
0y
=h
[0023]
其中,p
0x
为所述第一特征点的横坐标,p
0y
为所述第一特征点的纵坐标,w为所述反推气流出口宽度,c为预设的第三系数,d为预设的第四系数,t1为所述第一方向参数,h为所述反推气流未紊乱时的高度;
[0024]
所述第二特征点通过以下方式计算:
[0025][0026][0027]
其中,p
1x
为所述第二特征点的横坐标,p
1y
为所述第二特征点的纵坐标,p
0x
为所述第一特征点的横坐标,p
0y
为所述第一特征点的纵坐标,e为预设的第五系数,t1为所述第一方向参数,p
t
为所述反推气流总压;
[0028]
所述第三特征点通过以下方式计算:
[0029][0030][0031]
其中,p
2x
为所述第三特征点的横坐标,p
2y
为所述第三特征点的纵坐标,p
1x
为所述第二特征点的横坐标,p
1y
为所述第二特征点的纵坐标,f为预设的第六系数,t2为所述第二方向参数,p
t
为所述反推气流总压;
[0032]
所述第四特征点通过以下方式计算:
[0033]
[0034][0035]
其中,p
3x
为所述第四特征点的横坐标,p
3y
为所述第四特征点的纵坐标,p
2x
为所述第三特征点的横坐标,p
2y
为所述第三特征点的纵坐标,g为预设的第七系数,t3为所述第三方向参数,p
t
为所述反推气流总压。
[0036]
在本技术的一实施例中,该方法还包括:获取所述反推蜗壳正截面的最大面积所对应的沿程距离;其中所述基于所述二维内侧气动型面和所述反推气流出口宽度确定所述二维外侧气动型面的步骤包括:基于所述反推气流出口宽度确定所述反推蜗壳的入口直径和出口直径;基于所述入口直径和所述出口直径,根据双三次曲线构造所述二维外侧气动型面的流通面积变化曲线,其中所述反推蜗壳正截面的最大面积所对应的沿程距离为所述双三次曲线的极值;以及基于所述流通面积变化曲线和所述二维内侧气动型面确定所述二维外侧气动型面。
[0037]
在本技术的一实施例中,所述基于所述二维内侧气动型面和所述反推气流出口宽度确定所述二维外侧气动型面的步骤包括:基于所述反推气流出口宽度确定所述反推蜗壳的入口直径和出口直径;基于所述入口直径和所述出口直径,根据维辛斯基曲线、五次曲线或移轴维氏曲线构造所述二维外侧气动型面的流通面积变化曲线;以及基于所述流通面积变化曲线和所述二维内侧气动型面确定所述二维外侧气动型面。
[0038]
在本技术的一实施例中,该方法还包括:验证具有所述二维内侧气动型面和所述二维外侧气动型面的反推蜗壳是否满足反推试验要求;以及若不满足反推试验要求,利用正态分布取值方法重新确定所述第一特征点、所述第二特征点、所述第三特征点和所述第四特征点。
[0039]
在本技术的一实施例中,该方法还包括:若不满足反推试验要求,重新设置所述正态分布取值方法的标准差。
[0040]
在本技术的一实施例中,该方法还包括:获取试车台的空间限制参数,并使所述反推蜗壳的尺寸不大于所述试车台的空间限制参数。
[0041]
在本技术的一实施例中,所述反推蜗壳为c字状反推蜗壳。
[0042]
与现有技术相比,本技术的反推蜗壳的二维气动型面设计方法通过四阶贝塞尔曲线可以生成二阶连续且光滑的气动型面,为后期的结构设计所留的裕度更大;通过使用四个特征点的位置、反推气流出口宽度来量化反推蜗壳的二维表征气动型面,使得气动型面可以被量化控制或优化。本技术的反推蜗壳的二维气动型面设计方法,能够在短时间内构造出气动性能较好的气动型面,气动型面为量化表征,满足不同气流角度下的型面设计,并且适用于不同试车台。
附图说明
[0043]
包括附图是为提供对本技术进一步的理解,它们被收录并构成本技术的一部分,附图示出了本技术的实施例,并与本说明书一起起到解释本技术原理的作用。附图中:
[0044]
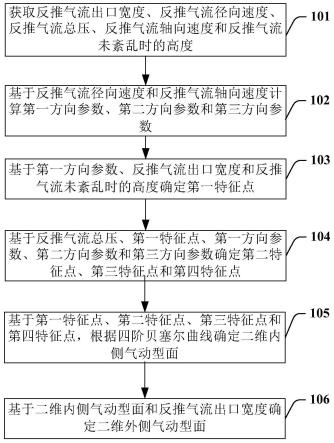
图1是根据本技术一实施例示出的反推蜗壳的二维气动型面设计方法的流程示意图。
[0045]
图2是根据本技术一实施例示出的反推蜗壳在径向截面上的气动型面示意图。
[0046]
图3是根据本技术一实施例示出的利用正态分布取值方法确定四个特征点的示意图。
[0047]
图4是根据本技术一实施例示出的反推蜗壳的二维外侧气动型面的生成过程示意图。
具体实施方式
[0048]
下面结合具体实施方式和附图对本发明作进一步说明,在以下的描述中阐述了更多的细节以便于充分理解本发明,但是本发明显然能够以多种不同于此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下根据实际应用情况作类似推广、演绎,因此不应以此具体实施方式的内容限制本发明的保护范围。
[0049]
例如,在说明书中随后记载的第一特征在第二特征上方或者上面形成,可以包括第一和第二特征通过直接联系的方式形成的实施方式,也可包括在第一和第二特征之间形成附加特征的实施方式,从而第一和第二特征之间可以不直接联系。另外,这些公开内容中可能会在不同的示例中重复附图标记和/或字母。该重复是为了简要和清楚,其本身不表示要讨论的各实施方式和/或结构间的关系。进一步地,当第一元件是用与第二元件相连或结合的方式描述的,该说明包括第一和第二元件直接相连或彼此结合的实施方式,也包括采用一个或多个其他介入元件加入使第一和第二元件间接地相连或彼此结合。
[0050]
如本发明所示,除非上下文明确提示例外情形,“一”、“一种”和/或“该”等词并非特指单数,也可包括复数。一般说来,术语“包括”与“包含”仅提示包括已明确标识的步骤和元素,而这些步骤和元素不构成一个排它性的罗列,方法或者设备也可能包含其他的步骤或元素。
[0051]
为了方便描述,此处可能使用诸如“之下”、“下方”、“低于”、“下面”、“上方”、“上”等等的空间关系词语来描述附图中所示的一个元件或特征与其他元件或特征的关系。将理解到,这些空间关系词语意图包含使用中或操作中的器件的、除了附图中描绘的方向之外的其他方向。例如,如果翻转附图中的器件,则被描述为在其他元件或特征“下方”或“之下”或“下面”的元件的方向将改为在所述其他元件或特征的“上方”。因而,示例性的词语“下方”和“下面”能够包含上和下两个方向。器件也可能具有其他朝向(旋转90度或处于其他方向),因此应相应地解释此处使用的空间关系描述词。此外,还将理解,当一层被称为在两层“之间”时,它可以是所述两层之间仅有的层,或者也可以存在一个或多个介于其间的层。
[0052]
需要注意的是,这些以及后续其他的附图均仅作为示例,其并非是按照等比例的条件绘制的,并且不应该以此作为对本发明实际要求的保护范围构成限制。此外,不同实施方式下的变换方式可以进行适当组合。
[0053]
本技术提供了一种反推蜗壳的二维气动型面设计方法。反推蜗壳作为一种反推试验时需要的防发动机再吸入反推气流的装置,具有二维内侧气动型面和二维外侧气动型面。在本技术的一实施例中,反推蜗壳可以为c字状反推蜗壳。
[0054]
图1是根据本技术一实施例示出的反推蜗壳的二维气动型面设计方法的流程示意图。图2是根据本技术一实施例示出的反推蜗壳在径向截面上的气动型面示意图。如图1所示,本实施例的反推蜗壳的二维气动型面设计方法包括以下步骤101-106:
[0055]
步骤101,获取反推气流出口宽度、反推气流径向速度、反推气流总压、反推气流轴
向速度和反推气流未紊乱时的高度。其中,反推气流未紊乱时的高度可以通过在气动型面入口处根据仿真或试验结果取得。以图2为例,反推气流出口宽度为a1点到a2点的距离。
[0056]
步骤102,基于反推气流径向速度和反推气流轴向速度计算第一方向参数、第二方向参数和第三方向参数。本实施例的反推蜗壳可以通过四个特征点来量化表征气动型面。以图2为例,本实施例中用来量化表征气动型面的四个特征点分别为图2中的p0、p1、p2、p3,其中p0为第一特征点,p1为第二特征点,p2为第三特征点,p3为第四特征点。第一方向参数可以用于计算第一特征点p0的横坐标以及表示从第一特征点p0到第二特征点p1的方向,第二方向参数可以用于表示从第二特征点p1到第三特征点p2的方向,第三方向参数可以用于表示从第三特征点p2到第四特征点p3的方向。
[0057]
步骤103,基于第一方向参数、反推气流出口宽度和反推气流未紊乱时的高度确定第一特征点。以图2为例,设坐标轴原点为a2,图2中x轴为与发动机轴线平行的方向,y轴为与发动机轴线垂直的方向。在一个示例中,第一特征点p0的y坐标可以为反推气流未紊乱时的高度。
[0058]
步骤104,基于反推气流总压、第一特征点、第一方向参数、第二方向参数和第三方向参数确定第二特征点、第三特征点和第四特征点。
[0059]
步骤105,基于第一特征点、第二特征点、第三特征点和第四特征点,根据四阶贝塞尔曲线确定二维内侧气动型面。所得到的二维内侧气动型面可以为如图2所示的内侧曲线。基于四个特征点来确定反推蜗壳的二维内侧气动型面,使得二维内侧气动型面可以被量化控制或优化。
[0060]
步骤106,基于二维内侧气动型面和反推气流出口宽度确定。在已经得到反推蜗壳的二维内侧气动型面的基础上,根据反推气流出口宽度确定反推蜗壳的二维外侧气动型面,使得二维外侧气动型面也可以被量化控制或优化。
[0061]
在本技术的一实施例中,本方法还可以包括获取试车台的空间限制参数,并使反推蜗壳的尺寸不大于试车台的空间限制参数这一步骤。通过将反推蜗壳的尺寸限制在试车台的空间大小范围内,能够确保设计出来的反推蜗壳可用于待试验的试车台。并且,可以通过改变对反推蜗壳的特征点取值范围的限制,得到或改进适用于不同试车台的反推蜗壳气动型面。
[0062]
综上所述,本实施例的反推蜗壳的二维气动型面设计方法通过四阶贝塞尔曲线可以生成二阶连续且光滑的气动型面,为后期的结构设计所留的裕度更大;通过使用四个特征点的位置、反推气流出口宽度来量化反推蜗壳的二维表征气动型面,使得气动型面可以被量化控制或优化。并且,能够在短时间内构造出气动性能较好的气动型面,气动型面为量化表征,满足不同气流角度下的型面设计,并且适用于不同试车台。
[0063]
在本技术的另一实施例中,反推蜗壳的二维气动型面设计方法包括以下步骤:
[0064]
获取反推气流出口宽度、反推气流径向速度、反推气流总压、反推气流轴向速度和反推气流未紊乱时的高度。其中,反推气流未紊乱时的高度可以是在气动型面入口处根据仿真或试验结果取得。以图2为例,反推气流出口宽度为a1到a2的距离。
[0065]
基于反推气流径向速度和反推气流轴向速度计算第一方向参数、第二方向参数和第三方向参数。本实施例的反推蜗壳可以通过四个特征点来量化表征气动型面。以图2为例,本实施例中用来量化表征气动型面的四个特征点分别为图2中的p0、p1、p2、p3,p0为第
一特征点,p1为第二特征点,p2为第三特征点,p3为第四特征点。第一方向参数可以是用于计算第一特征点p0的横坐标的参数以及表示从第一特征点p0到第二特征点p1的方向的参数,第二方向参数可以是用于表示从第二特征点p1到第三特征点p2的方向的参数,第三方向参数可以是用于表示从第三特征点p2到第四特征点p3的方向的参数。
[0066]
第一方向参数通过以下方式计算:
[0067][0068]
其中,t1为第一方向参数,vr为反推气流径向速度,va为反推气流轴向速度。
[0069]
第二方向参数通过以下方式计算:
[0070]
t2=tan(a+arctant1)
[0071]
其中,t1为第一方向参数,t2为第二方向参数,a为预设的第一系数。在一个示例中,a的取值可以为1.585。
[0072]
第三方向参数通过以下方式计算:
[0073]
t3=tan(arctant
2-b)
[0074]
其中,t2为第二方向参数,t3为第三方向参数,b为预设的第二系数。在一个示例中,b的取值可以为1.229。
[0075]
基于第一方向参数、反推气流出口宽度和反推气流未紊乱时的高度确定第一特征点。以图2为例,坐标轴原点为a2,图2中x轴为与发动机轴线平行的方向,y轴为与发动机轴线垂直的方向。第一特征点通过以下方式计算:
[0076][0077]
p
0y
=h
[0078]
其中,p
0x
为第一特征点的横坐标,p
0y
为第一特征点的纵坐标,w为反推气流出口宽度,c为预设的第三系数,d为预设的第四系数,t1为第一方向参数,h为反推气流未紊乱时的高度。在一个示例中,c的取值可以为0.523,d的取值可以为151.75。
[0079]
基于反推气流总压、第一特征点、第一方向参数、第二方向参数和第三方向参数确定第二特征点、第三特征点和第四特征点。
[0080]
第二特征点通过以下方式计算:
[0081][0082][0083]
其中,p
1x
为第二特征点的横坐标,p
1y
为第二特征点的纵坐标,p
0x
为第一特征点的横坐标,p
0y
为第一特征点的纵坐标,e为预设的第五系数,t1为第一方向参数,p
t
为反推气流总压。在一个示例中,e的取值可以为0.0198。
[0084]
第三特征点通过以下方式计算:
[0085][0086][0087]
其中,p
2x
为第三特征点的横坐标,p
2y
为第三特征点的纵坐标,p
1x
为第二特征点的横坐标,p
1y
为第二特征点的纵坐标,f为预设的第六系数,t2为第二方向参数,p
t
为反推气流总压。在一个示例中,f的取值可以为0.0068。
[0088]
第四特征点通过以下方式计算:
[0089][0090][0091]
其中,p
3x
为第四特征点的横坐标,p
3y
为第四特征点的纵坐标,p
2x
为第三特征点的横坐标,p
2y
为第三特征点的纵坐标,g为预设的第七系数,t3为第三方向参数,p
t
为反推气流总压。在一个示例中,g的取值可以为0.041。
[0092]
上述预设的第一至第七系数a-g,均可以根据实际需要进行设置,本技术对第一至第七系数a-g的取值不作限定。
[0093]
基于第一特征点、第二特征点、第三特征点和第四特征点,根据四阶贝塞尔曲线确定二维内侧气动型面。基于四个特征点来确定反推蜗壳的二维内侧气动型面,使得二维内侧气动型面可以被量化控制或优化。
[0094]
基于二维内侧气动型面和反推气流出口宽度确定二维外侧气动型面。
[0095]
在本技术的一实施例中,本方法还可以包括步骤:获取反推蜗壳正截面的最大面积所对应的沿程距离。基于二维内侧气动型面和反推气流出口宽度确定二维外侧气动型面的步骤可以通过双三次曲线来进行,具体包括以下步骤:基于反推气流出口宽度确定反推蜗壳的入口直径和出口直径。在本技术的一实施例中,入口直径可以为反推气流出口宽度与预设的入口直径系数的乘积,出口直径可以为反推气流出口宽度与预设的出口直径系数的乘积。在一示例中,入口直径系数可以为2.046,出口直径系数可以为0.33724。入口直径系数和出口直径系数均可以根据实际需要进行设置,本技术对此不作限定。基于入口直径和出口直径,根据双三次曲线构造二维外侧气动型面的流通面积变化曲线,其中反推蜗壳正截面的最大面积所对应的沿程距离为双三次曲线的极值。然后,根据流通面积变化曲线中各沿程距离所对应的内外侧型面直径,由内侧气动型面向外延伸,确定二维外侧气动型面。图4是根据本技术一实施例示出的反推蜗壳的二维外侧气动型面的生成过程示意图。
[0096]
通过使用双三次曲线来确定二维外侧气动型面,并将反推蜗壳正截面的最大面积所对应的沿程距离作为双三次曲线的极值,能够得到性能更好的二维外侧气动型面。
[0097]
在本技术的另一实施例中,基于二维内侧气动型面和反推气流出口宽度确定二维外侧气动型面的步骤可以通过维辛斯基曲线、五次曲线或移轴维氏曲线来进行,具体包括以下步骤:基于反推气流出口宽度确定反推蜗壳的入口直径和出口直径。在本技术的一实
施例中,入口直径可以为反推气流出口宽度与预设的入口直径系数的乘积,出口直径可以为反推气流出口宽度与预设的出口直径系数的乘积。在一示例中,入口直径系数可以为2.046,出口直径系数可以为0.33724。入口直径系数和出口直径系数均可以根据实际需要进行设置,本技术对此不作限定。基于入口直径和出口直径,根据维辛斯基曲线、五次曲线或移轴维氏曲线构造二维外侧气动型面的流通面积变化曲线。然后,根据流通面积变化曲线中各沿程距离所对应的内外侧型面直径,由内侧气动型面向外延伸,确定二维外侧气动型面。
[0098]
在已经得到反推蜗壳的二维内侧气动型面的基础上,根据反推气流出口宽度确定反推蜗壳的二维外侧气动型面,使得二维外侧气动型面也可以被量化控制或优化。
[0099]
在得到反推蜗壳的二维内侧气动型面和二维外侧气动型面,反推蜗壳的二维气动型面设计已完成。设计好的反推蜗壳还需要通过试验来验证其气动性能是否满足要求,若不满足要求,需要继续反复迭代来优化调整反推蜗壳。
[0100]
在本技术的一实施例中,本方法在初次确定反推蜗壳的二维内侧气动型面和二维外侧气动型面后,还可以包括以下步骤,以优化调整反推蜗壳:验证具有二维内侧气动型面和二维外侧气动型面的反推蜗壳是否满足反推试验要求。若不满足反推试验要求,利用正态分布(又称高斯分布)取值方法重新确定第一特征点、第二特征点、第三特征点和第四特征点。上述步骤可根据实际需要重复进行,直到反推蜗壳满足反推试验要求。
[0101]
图3是根据本技术一实施例示出的利用正态分布取值方法确定四个特征点的示意图。第一特征点p0所在的水平线段为p0点的正态分布取值范围。以p0点为起点,沿反推气流方向向上,取得p1点坐标,第二特征点p1所在的线段为p1点的正态分布取值范围。以p1点为起点做至y方向边界的扇形范围,该扇形范围为第三特征点p2的正态分布取值范围,得到p2点坐标。以p1点为起点做至x方向边界的矩形范围,该矩形范围为第四特征点p3的正态分布取值范围,得到p3点坐标。p1-p4的坐标可通过前述方式计算,在此不再赘述。通过改变特征点的相对位置,可以控制气动型面的造型并使其适用于不同反推气流角度下的工况,得到适用于多角度下的反推蜗壳气动型面。
[0102]
若不满足反推试验要求,在利用正态分布取值方法重新确定第一特征点、第二特征点、第三特征点和第四特征点时,可以重新设置正态分布取值方法的标准差。四个特征点p1-p4的正态分布取值范围的大小由正态分布方法的标准差控制,通过调整正态分布的标准差控制特征点的位置,从而改变内侧型面的造型。
[0103]
在本技术的一实施例中,本方法还可以包括获取试车台的空间限制参数,并使反推蜗壳的尺寸不大于试车台的空间限制参数这一步骤。如图3所示,最外围的方框为试车台的空间限制,x
max
和y
max
分别为x轴上的空间限制参数和y轴上的空间限制参数。
[0104]
通过将反推蜗壳的尺寸限制在试车台的空间大小范围内,能够确保设计出来的反推蜗壳可用于待试验的试车台。并且,可以通过改变对反推蜗壳的特征点取值范围的限制,得到或改进适用于不同试车台的反推蜗壳气动型面。
[0105]
综上所述,本技术的反推蜗壳的二维气动型面设计方法根据试车台的空间限制,并结合正态分布取值方法得到四个在径向分布的特征点,然后通过四阶贝塞尔曲线生成内侧型面。在内侧型面的反复优化中,可以通过调整正态分布的标准差控制特征点的位置,从而改变内侧型面的造型。通过对蜗壳进出口宽度的控制来控制气动型面流通面积规律,并
最终得到气动型面的面积变化趋势,构造生成外侧型面,最终得到完整的反推蜗壳的气动造型。
[0106]
本技术的反推蜗壳的二维气动型面设计方法可以在短时间内得到多组相对性能较好的气动型面,根据仿真模拟或缩比试验来验证其气动性能并进行择优选择,最后可以输出优化后的气动造型,这有利于与结构设计之间反复迭代中对气动造型的优化调整。
[0107]
本发明虽然以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以做出可能的变动和修改。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何修改、等同变化及修饰,均落入本发明权利要求所界定的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1