基于人工智能和计算机视觉的交通事故处理方法和系统与流程
1.本发明涉及一种基于人工智能和计算机视觉的交通事故处理方法和系统。
背景技术:
2.在发生交通事故时,通常需要交警去现场进行交通事故责任划分,但是,从发生交通事故到交警到达现场通常需要一定的时间,而且,若交通事故发生在上下班高峰期,则在等待交警的过程中,可能会严重堵塞交通,并且可能会引发二次交通事故。
技术实现要素:
3.为了解决上述技术问题,本发明提供一种基于人工智能和计算机视觉的交通事故处理方法和系统。
4.本发明采用以下技术方案:
5.一种基于人工智能和计算机视觉的交通事故处理方法,包括:
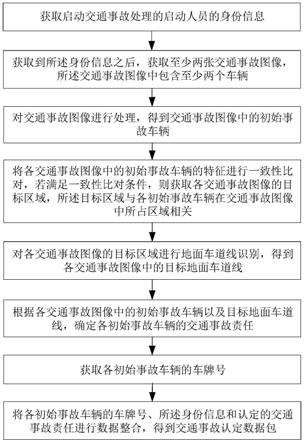
6.获取启动交通事故处理的启动人员的身份信息;
7.获取到所述身份信息之后,获取至少两张交通事故图像,所述交通事故图像中包含至少两个车辆;
8.对交通事故图像进行处理,得到交通事故图像中的初始事故车辆;
9.将各交通事故图像中的初始事故车辆的特征进行一致性比对,若满足一致性比对条件,则获取各交通事故图像的目标区域,所述目标区域与各初始事故车辆在交通事故图像中所占区域相关;
10.对各交通事故图像的目标区域进行地面车道线识别,得到各交通事故图像中的目标地面车道线;
11.根据各交通事故图像中的初始事故车辆以及目标地面车道线,确定各初始事故车辆的交通事故责任;
12.获取各初始事故车辆的车牌号;
13.将各初始事故车辆的车牌号、所述身份信息和认定的交通事故责任进行数据整合,得到交通事故认定数据包。
14.可选地,所述对交通事故图像进行处理,得到交通事故图像中的初始事故车辆,具体为:
15.获取各个车辆的特征数据,所述特征数据包括对应车辆在对应的交通事故图像中所占区域的图像数据;
16.将同一个交通事故图像中包含的各车辆中两两车辆的特征数据分别进行组合,得到多个特征集合数据;
17.将各特征集合数据进行分类,得到目标特征集合数据,并将所述目标特征集合数据对应的两个车辆确定为初始事故车辆,所述目标特征集合数据为各特征集合数据中属于预设目标类别的特征集合数据。
18.可选地,所述将各特征集合数据进行分类,得到目标特征集合数据,包括:
19.将各特征集合数据转换成特征集合矩阵;
20.将各特征集合矩阵通过预设的卷积神经网络,得到各全连接层矩阵;
21.基于全连接层矩阵和预设参数矩阵,计算各特征集合矩阵属于各个预设类别的概率值;
22.对于任意一个特征集合矩阵,获取最高的概率值,将所述最高的概率值对应的预设类别作为该特征集合矩阵对应的特征集合数据的类别;
23.获取各特征集合数据的类别中属于预设目标类别的特征集合数据,得到所述目标特征集合数据。
24.可选地,各交通事故图像中的初始事故车辆的特征为颜色特征;
25.所述将各交通事故图像中的初始事故车辆的特征进行一致性比对,包括:
26.对各交通事故图像中的各初始事故车辆的颜色进行识别,生成各交通事故图像对应的颜色集合,并比对各交通事故图像中对应的颜色集合是否一致,若一致,表示满足一致性比对条件。
27.可选地,所述对各交通事故图像的目标区域进行地面车道线识别,得到各交通事故图像中的目标地面车道线,包括:
28.获取交通事故图像的目标区域的目标区域图像;
29.对所述目标区域图像中的区别于所述目标区域图像背景的目标对象进行识别;
30.根据所述目标对象在目标区域图像中的相对位置,确定各个目标对象的表达式;
31.将各个目标对象的表达式输入至预设的地面车道线识别数据库中,获取地面车道线对应的表达式,得到所述目标地面车道线;其中,所述地面车道线识别数据库包括与地面车道线相对应的至少一个表达式,
32.可选地,所述根据各交通事故图像中的初始事故车辆以及目标地面车道线,确定各初始事故车辆的交通事故责任,包括:
33.根据交通事故图像中,两个初始事故车辆和目标地面车道线的相对位置,计算两个初始事故车辆各自对应的过线面积以及相对角度,其中,过线面积为初始事故车辆在已知行进方向上超过目标地面车道线的面积,相对角度为初始事故车辆的中轴线与目标地面车道线在已知行进方向上的夹角;
34.根据预设的责任类别数据库,确定各个交通事故图像中,两个初始事故车辆各自对应的过线面积以及相对角度所对应的交通事故责任类别;其中,责任类别数据库包括过线面积区间、相对角度区间以及交通事故责任类别的对应关系,
35.可选地,所述将各初始事故车辆的车牌号、所述身份信息和认定的交通事故责任进行数据整合,得到交通事故认定数据包之后,所述交通事故处理方法还包括以下步骤:
36.检测预设范围内的已开启蓝牙的智能手机,并进行蓝牙配对;
37.蓝牙配对完成之后,将所述交通事故认定数据包发送至所述智能手机。
38.一种基于人工智能和计算机视觉的交通事故处理系统,包括存储器和处理器,以及存储在所述存储器上并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的基于人工智能和计算机视觉的交通事故处理方法。
39.先获取启动交通事故处理的启动人员的身份信息,只有在获取到身份信息之后才
进行后续的操作,提升数据处理的可靠性;在获取到身份信息之后,获取至少两张交通事故图像,每一张交通事故图像中均包含至少两个车辆,然后对交通事故图像进行处理,得到交通事故图像中的初始事故车辆,接着将各交通事故图像中的初始事故车辆的特征进行一致性比对,若满足一致性比对条件,则获取各交通事故图像的目标区域,目标区域与各初始事故车辆在交通事故图像中所占区域具有关联,对各交通事故图像的目标区域进行地面车道线识别,得到各交通事故图像中的目标地面车道线,根据各交通事故图像中的初始事故车辆以及目标地面车道线,确定各初始事故车辆的交通事故责任,最后结合各初始事故车辆的车牌号、身份信息和认定的交通事故责任,得到交通事故认定数据包。因此,本发明提供的交通事故处理方法是一种自动处理方法,在发生交通事故之后,无需等待交警,直接就可以根据数据处理得到相关车辆的交通事故责任认定结果,提升交通事故处理效率,降低交通影响程度,进而降低引发二次交通事故的可能性,提升交通安全。
附图说明
40.图1是本发明提供的一种基于人工智能和计算机视觉的交通事故处理方法的流程图。
具体实施方式
41.本实施例提供一种基于人工智能和计算机视觉的交通事故处理方法,该交通事故处理方法的硬件执行主体可以为智能移动终端,比如智能手机。如图1所示,该交通事故处理方法包括:
42.步骤1:获取启动交通事故处理的启动人员的身份信息:
43.在发生交通事故之后,需要启动交通事故处理。硬件执行主体获取启动交通事故处理的启动人员的身份信息,启动人员可以是交通事故的任意一方当事人。作为一个具体实施方式,当打开与该交通事故处理方法相对应的app时,会出现一个身份信息采集界面,用于采集启动人员的身份信息,比如指纹信息、人脸图像信息等等。获取到启动人员的身份信息之后,才可以进行后续的交通事故处理过程。
44.步骤2:获取到所述身份信息之后,获取至少两张交通事故图像,所述交通事故图像中包含至少两个车辆:
45.获取到启动人员的身份信息之后,获取至少两张交通事故图像,交通事故图像的具体个数由实际需要进行设置。交通事故图像由摄像头拍摄得到。
46.由于通常情况下,交通事故由两个车辆产生,因此,本实施例中,交通事故图像中包含至少两个车辆。交通事故图像中包含至少两个车辆是因为:若交通事故图像的拍摄距离比较远,则除了出现交通事故的两个当事车辆之外,还可能包括其他的正常车辆。
47.应当理解,可以采用已有的目标检测算法对各交通事故图像中的各个车辆进行识别。
48.步骤3:对交通事故图像进行处理,得到交通事故图像中的初始事故车辆:
49.对交通事故图像进行处理,得到交通事故图像中的初始事故车辆,应当理解,初始事故车辆为两个。作为一个具体实施方式,以下给出一种具体处理过程:
50.(1)获取各个车辆的特征数据,特征数据包括对应车辆在对应的交通事故图像中
所占区域的图像数据。因此,图像数据为对应车辆在对应的交通事故图像中所占区域的位置数据,各车辆的特征数据根据车辆在对应的交通事故图像中的位置而确定。作为一个具体实施方式,可以给各个车辆设定用于限定对应车辆的边界框。边界框的设置方式属于常规技术手段,不再赘述。当然,车辆在对应的交通事故图像中所占区域不会超过该车辆的边界框所限定的范围,那么,车辆的图像数据就包括对应边界框的中心点以及边界框的各个边的各个点在对应交通事故图像中的坐标以及边界框的面积等。
51.(2)将同一个交通事故图像中包含的各车辆中两两车辆的特征数据分别进行组合,得到多个特征集合数据。特征集合数据是由对应的两个车辆的特征数据组合而成。作为一个具体实施方式,若交通事故图像中包含3个车辆,则总共有3种组合方式,分别是:第一个车辆与第二个车辆、第二个车辆与第三个车辆、第一个车辆和第三个车辆,就可以得到三个特征集合数据。
52.(3)将各特征集合数据进行分类,得到目标特征集合数据,即根据分类结果,从各特征集合数据中筛选得到所需的特征集合数据。作为一个具体实施方式,以下给出一种具体的处理过程:
53.采用预设的数据转换成矩阵的转换算法,将各特征集合数据转换成特征集合矩阵。应当理解,特征集合数据包括多种数据,因此,预设的数据转换成矩阵的转换方式中涉及各种数据与矩阵数据的对应关系。
54.将各特征集合矩阵通过预设的卷积神经网络,得到各全连接层矩阵。其中,卷积神经网络是事先通过多个训练数据训练得到,训练数据包括特征集合训练矩阵以及特征集合训练矩阵对应的类别。卷积神经网络包括卷积层、池化层和全连接层。各特征集合矩阵依次通过卷积层、池化层以及全连接层进行计算,得到各全连接层矩阵。
55.基于全连接层矩阵和预设参数矩阵,计算各特征集合矩阵属于各个预设类别的概率值。作为一个具体实施方式,采用如下计算公式进行计算:
[0056][0057]
其中,σ(k|j)为特征集合矩阵k属于预设类别j的概率分数,z
k
为特征集合矩阵k对应的全连接层矩阵,x
j
为预设类别j对应的预设参数矩阵,x
i
为预设类别i对应的预设参数矩阵,m为预设类别的总个数,e为自然常数。
[0058]
因此,通过上述计算公式,可以得到每一个特征集合矩阵属于各个预设类别的概率值,概率值表征每一个特征集合矩阵属于各个预设类别的可能性,概率值越大,可能性越高。对于任意一个特征集合矩阵,从得到的各个概率值中获取最高的概率值,将最高的概率值对应的预设类别作为该特征集合矩阵对应的特征集合数据的类别。
[0059]
本实施例中,特征集合数据分为两类,分别是:两个车辆均为事故车辆时两个车辆的特征数据组成的特征集合数据,以及两个车辆不全是事故车辆或者全不是事故车辆时两个车辆的特征数据组成的特征集合数据,相应地,预设类别有两个,分别是:两个车辆均为事故车辆,以及两个车辆不全是或者全不是事故车辆。那么,通过上述处理过程,可以得到各个特征集合矩阵分别属于上述两类的概率值,就可以两个概率值中的较大值,较大概率值对应的类别即为特征集合数据的类别,具体为:两个车辆均为事故车辆,或者,两个车辆不全是或者全不是事故车辆。
[0060]
获取各特征集合数据的类别中属于预设目标类别的特征集合数据,预设目标类别为两个车辆均为事故车辆,即获取各特征集合数据的类别中属于两个车辆均为事故车辆的特征集合数据,得到目标特征集合数据。相应地,将目标特征集合数据对应的两个车辆确定为初始事故车辆。
[0061]
步骤4:将各交通事故图像中的初始事故车辆的特征进行一致性比对,若满足一致性比对条件,则获取各交通事故图像的目标区域,所述目标区域与各初始事故车辆在交通事故图像中所占区域相关:
[0062]
为了避免单个交通事故图像中的初始事故车辆存在的识别误差,得到各交通事故图像中的初始事故车辆之后,将各交通事故图像中的初始事故车辆的特征进行一致性比对,只有满足一致性比对条件,才确定识别得到的两个初始事故车辆为真正的事故车辆。
[0063]
本实施例中,各交通事故图像中的初始事故车辆的特征为颜色特征,即车辆的颜色。那么,将各交通事故图像中的初始事故车辆的特征进行一致性比对的比对过程包括:对各交通事故图像中的各初始事故车辆的颜色进行识别,生成各交通事故图像对应的颜色集合,颜色集合包括两个初始事故车辆的颜色。并比对各交通事故图像中对应的颜色集合是否一致,若一致,表示满足一致性比对条件。其中,车辆颜色的识别算法可以采用已有的颜色识别算法,不再赘述。
[0064]
若满足一致性比对条件,则获取各交通事故图像的目标区域,目标区域与各初始事故车辆在交通事故图像中所占区域相关。由于两个初始事故车辆肯定是相邻的,那么,这两个初始事故车辆所占区域一定是相交的,或者有重合的区域。本实施例中,将两个初始事故车辆在对应的交通事故图像中所占区域的并集区域作为目标区域,目标区域为两个初始事故车辆所占的区域。那么,每一个交通事故图像均对应有一个目标区域。
[0065]
作为其他的实施方式,各交通事故图像中的初始事故车辆的特征还可以为车牌号信息,通过对交通事故图像中的初始事故车辆的车牌号进行一致性比对,得到一致性比对结果。
[0066]
步骤5:对各交通事故图像的目标区域进行地面车道线识别,得到各交通事故图像中的目标地面车道线:
[0067]
本实施例中,需要结合地面车道线以及两个初始事故车辆的位置,确定交通事故责任划分,因此,需要对各交通事故图像的目标区域进行地面车道线识别,得到各交通事故图像中的目标地面车道线。作为一个具体实施方式,以下给出该步骤的具体实现过程:
[0068]
(1)获取交通事故图像的目标区域的目标区域图像。应当理解,目标区域图像中除了包含两个初始事故车辆之外,还包含地面车道线。为了便于后续图像处理,还可以通过预设的图像特征获取算法,获取到目标区域图像的特征图像。
[0069]
(2)对目标区域图像中的区别于目标区域图像背景的目标对象进行识别。由于道路中的各种指示线(比如车道线、斑马线、箭头指示线等)的颜色为白色或者黄色,道路主体颜色为暗灰色,因此,道路中的各种指示线的颜色与道路主体颜色的差异较大,即像素值的差异较大。那么,将道路中的各种指示线作为目标对象,道路主体作为图像背景,就可以对目标区域图像中的区别于目标区域图像背景的目标对象进行识别。作为一个具体实施方式,目标对象处于两个像素值范围内,这两个像素值范围分别对应白色和黄色,那么,获取目标区域图像各个像素点的像素值,通过与两个像素值范围进行比对,就可以识别得到目
标对象,即识别得到道路中的指示线。应当理解,目标区域图像中的目标对象的个数可以只有一个,也可以有多个。
[0070]
上述目标对象的识别过程可以提升识别准确性,作为其他的实施方式,还可以采用目前已有的其他目标识别算法对道路中的各种指示线进行识别,即对目标区域图像中的区别于目标区域图像背景的目标对象进行识别。
[0071]
(3)根据目标对象在目标区域图像中的相对位置,确定各个目标对象的表达式。
[0072]
作为一个具体实施方式,以目标区域图像构建二维坐标系,具体地,可以将目标区域图像最左下方的像素点作为二维坐标系原点,目标区域图像的长所在直线和宽所在直线分别作为二维坐标系原点的x轴和y轴。那么,就可以确定目标区域图像中各个像素点的坐标,也就可以确定目标对象的各个像素点的坐标。然后,对各个目标对象的表达式进行拟合,即对各个目标对象的线性方程进行拟合,得到各个目标对象的表达式。其中,可以采用已有的拟合算法进行拟合,比如ransac曲线拟合算法。对于任意一个目标对象,在目标区域图像中,该目标对象的像素点处于对应的表达式所对应的直线的两侧。
[0073]
(4)将各个目标对象的表达式输入至预设的地面车道线识别数据库中,获取地面车道线对应的表达式,得到目标地面车道线,其中,地面车道线识别数据库包括地面车道线对应的至少一个表达式。
[0074]
由于指示线包括多种类型,比如地面车道线、斑马线、箭头指示线等,因此,就需要从目标对象中筛选得到目标地面车道线,即从得到的各指示线中筛选得到目标地面车道线。
[0075]
不同的指示线的形状不同,即地面车道线、斑马线和箭头指示线的形状不同,相应地,不同种类的目标对象所对应的表达式集合不同,表达式集合中包括至少一个与对应的目标对象相对应的表达式。应当理解,由于不同类型的指示线的形状是已知的,那么,各种类型的指示线的所对应的表达式集合中的各表达式也是已知的。因此,就可以根据各种类型的指示线,以及各种类型的指示线所对应的表达式,构建一个地面车道线识别数据库,该地面车道线识别数据库包括地面车道线对应的至少一个表达式,表达式个数由地面车道线的实际情况进行确定。应当理解,地面车道线识别数据库涵盖目前可以获取到的所有的地面车道线的表达式。当然,该地面车道线识别数据库还可以包括其他种类的指示线所对应的至少一个表达式。那么,将各个目标对象的表达式输入至该地面车道线识别数据库中,就可以获取到目标对象中的地面车道线对应的表达式,得到目标地面车道线。
[0076]
上述地面车道线识别过程能够提升地面车道线识别的准确性。作为其他的实施方式,还可以采用目前已有的地面车道线识别算法对各交通事故图像的目标区域进行地面车道线识别。
[0077]
步骤6:根据各交通事故图像中的初始事故车辆以及目标地面车道线,确定各初始事故车辆的交通事故责任:
[0078]
对于任意一个交通事故图像,根据该交通事故图像中的两个初始事故车辆以及获取到的目标地面车道线,即根据两个初始事故车辆与目标地面车道线的位置关系,就可以确定各初始事故车辆的交通事故责任,比如:将压线或超线的初始事故车辆的交通事故责任定为“全责”,将未压线的初始事故车辆的交通事故责任定为“无责”。
[0079]
作为一个具体实施方式,以下给出交通事故责任认定的一种具体实现过程:
[0080]
根据交通事故图像中,两个初始事故车辆和目标地面车道线的相对位置,计算两个初始事故车辆各自对应的过线面积以及相对角度,其中,过线面积为初始事故车辆在已知行进方向上超过目标地面车道线的面积,相对角度为初始事故车辆的中轴线与目标地面车道线在已知行进方向上的夹角。应当理解,已知行进方向是已知的,即已知行进方向在交通事故图像中是已知的。由于各初始事故车辆在交通事故图像中所占区域是已知的,那么就可以计算得到两个初始事故车辆各自在已知行进方向上超过目标地面车道线的面积。初始事故车辆的中轴线可以对初始事故车辆的图像进行处理得到,也可以通过ransac曲线拟合算法拟合得到初始事故车辆的线性方程,将线性方程所在交通事故图像中对应的直线作为对应初始事故车辆的中轴线,然后,计算初始事故车辆的中轴线与目标地面车道线在已知行进方向上的夹角,得到相对角度。
[0081]
预设有责任类别数据库,责任类别数据库包括过线面积区间、相对角度区间以及交通事故责任类别的对应关系,即包括多个对应关系,各对应关系为过线面积区间、相对角度区间以及交通事故责任类别的对应关系。那么,将得到的两个初始事故车辆各自对应的过线面积以及相对角度输入至预设的责任类别数据库中,确定各个交通事故图像中,两个初始事故车辆各自对应的过线面积以及相对角度所对应的交通事故责任类别。
[0082]
应当理解,责任类别数据库中包含的交通事故责任类别设置的更加细化,比如除了“全责”和“无责”之外,还可以设置“主责”、“次责”等等。那么,责任类别数据库中包含“无责”对应的过线面积区间和相对角度区间,“次责”对应的过线面积区间和相对角度区间,“主责”对应的过线面积区间和相对角度区间,“全责”对应的过线面积区间和相对角度区间。
[0083]
步骤7:获取各初始事故车辆的车牌号:
[0084]
在得到各初始事故车辆的交通事故责任类别之后,通过对交通事故图像进行车牌号识别,获取各初始事故车辆的车牌号。应当理解,采用目前已知的车牌号识别算法进行车牌号识别。
[0085]
步骤8:将各初始事故车辆的车牌号、所述身份信息和认定的交通事故责任进行数据整合,得到交通事故认定数据包:
[0086]
将步骤7得到的各初始事故车辆的车牌号、步骤1得到的身份信息以及步骤6得到的交通事故责任进行数据整合,比如进行数据压缩,得到交通事故认定数据包。应当理解,交通事故认定数据包包括:两个初始事故车辆的车牌号、启动交通事故责任认定的启动人员的身份信息以及两个初始事故车辆的交通事故责任。
[0087]
得到交通事故认定数据包之后,可以将其上传至交警系统或者其他服务器,或者存储在本地。
[0088]
本实施例中,在步骤8之后,交通事故处理方法还包括以下步骤:
[0089]
步骤9:检测预设范围内的已开启蓝牙的智能手机,并进行蓝牙配对:
[0090]
检测该交通事故处理方法的硬件执行主体的预设范围内已开启蓝牙的智能手机,并与智能手机进行蓝牙配对。应当理解,智能手机可以为与交通事故相关的其他人员的手机,也可以为交警的手机。
[0091]
步骤10:蓝牙配对完成之后,将所述交通事故认定数据包发送至所述智能手机:
[0092]
蓝牙配对完成之后,即可建立与智能手机的蓝牙连接,然后,将得到的交通事故认
定数据包发送至智能手机。
[0093]
本实施例还提供一种基于人工智能和计算机视觉的交通事故处理系统,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现本实施例提供的基于人工智能和计算机视觉的交通事故处理方法的步骤,由于该基于人工智能和计算机视觉的交通事故处理方法在上述实施例中已给出了具体描述,不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1