基于深度神经网络的海水温度、盐度与流速的三维时空场联合预测方法
1.本发明涉及海洋机器人与海洋数据驱动建模领域,具体是基于深度神经网络的海水温度、盐度与流速的三维时空场联合预测方法。
背景技术:
2.海水温度、盐度和流速等海洋要素状态的预测对于许多民事和军事应用都具有重要意义。为了实现精确的海洋要素场预测,需要利用拉格朗日平台进行海洋原位观测。无人水面航行器、自主水下机器人和水下滑翔机等海洋观测平台是几种重要的拉格朗日平台,在全球和区域性海洋观测网络中的应用日益广泛。与传统的海洋原位观测平台相比,拉格朗日平台具有自主性和可控机动能力的优势。因此,优化海洋机器人的数据采集位置和路径是基于拉格朗日平台的海洋观测和预测系统运行的关键问题。
3.为了优化海洋环境状态预报中海洋机器人的观测位置和观测路径,除优化方法和优化算法,还需要一个能够测量在任意时间和位置采样数据的效用的海洋模型,同化移动观测平台采集的稀疏数据,并对未来的海洋环境状态进行预测,为海洋机器人的最佳观测位置和观测路径规划提供支撑。除需要求解地球物理流体动力学微分方程的数值海洋模式,局部区域海洋环境的数据驱动模型是一种可以支持快速、高精度、高分辨率动态复杂区域海洋环境预测和海洋机器人采样策略优化的重要模型。
4.深度学习是一种有效的数据驱动建模和预测方法,适用于局部区域海洋环境预测。目前基于深度学习的数据驱动海洋环境建模方法主要针对于单个海洋环境要素。海水温度、盐度、流速等多种要素之间存在相互作用,且海洋现象由多种海洋要素共同影响,因此对多种海洋要素进行联合建模,能够为海洋要素场预测提供更加完备的信息,提高预测精度,且对于海洋现象分析具有重要意义。而在基于海洋机器人的海洋环境观测和预测系统的现有技术中,还没有建立联合海水温度、盐度、流速等多个海洋环境要素的动力学模型,也没有对各要素三维时空场进行联合预测的技术。
技术实现要素:
5.针对现有技术的不足,本发明的目的是提供一种新的基于深度学习的,联合上述多要素建立的三维海洋环境场预测模型,并在神经网络中联合海水温度、盐度、流速等要素场信息进行预测。
6.本发明为实现上述目的所采用的技术方案是:基于深度神经网络的海水温度、盐度与流速的三维时空场联合预测方法,其特征在于,包括以下步骤:
7.步骤1:从数据集中获取海洋数值模式输出的海水温度、盐度与流速的三维空间场历史时序数据;
8.步骤2:将三维空间场海水温度、盐度与流速历史数据进行标准化处理;
9.步骤3:将标准化后的数据集分为训练样本集、验证样本集与测试样本集;
10.步骤4:建立深度神经网络模型,设置训练停止条件;
11.步骤5:利用训练样本集与验证样本集对人工神经网络模型进行训练与参数选取,在达到训练停止条件后终止训练,防止神经网络过拟合;
12.步骤6:利用测试样本集对神经网络预测结果进行评估计算,判断神经网络是否满足优化目标,从而获取用于预测海水温度、盐度与流速的优化神经网络模型;
13.步骤7:获取前k个时刻海水温度、盐度与流速的海洋数值模式输出数据进行标准化,输入已训练的神经网络模型,自动获取下一时刻各要素对应三维空间场预测值,实现对各要素的联合预测。
14.是采用hycom海洋数值模式,采用glbv0.08-53.x数据集。
15.所述的历史时序观测数据的维度为(k,m,n,d),其中k为输入数据时间序列中的时间步数,m为输入数据在纬向上的长度,n为输入数据在经向上的长度,d为输入数据对应三维空间场中的层数。
16.所述的数据标准化处理方法为:
17.z=(x-μ)/σ
ꢀꢀ
(1)其中x为原始数据,z为标准化处理后的数据,μ为原始数据的均值,σ为原始数据的标准差。
18.所述的训练样本集为全部数据集的70%,所述的验证样本集为全部数据集的15%,所述的测试样本集为全部数据集的15%;
19.所述的人工神经网络模型包括四个并列的encoding
–
forecasting结构的convlstm网络、融合特征节点、四个并列的卷积层;所述四个并列的encoding
–
forecasting结构的convlstm网络用于对海水温度、盐度与流速中每种要素历史时间序列深层特征的提取;所述融合特征节点用于融合提取的海水温度、盐度与流速的深层特征,获取联合特征;所述四个并列的卷积层用于对联合特征分别进行卷积操作,获取各要素三维空间场下一时刻的预测结果。
20.所述的encoding
–
forecasting结构convlstm网络的输出维度为(m,n,p),其中p为convlstm网络隐藏层状态数量;所述的联合特征的维度为(m,n,4
×
p),所述的模型预测输出维度为(m,n,d)。
21.所述的人工神经网络模型训练停止条件包括达到最大迭代次数、最佳训练时间、最小代价函数值、最小训练梯度。
22.所述的代价函数为:
[0023][0024]
其中,g=m
×n×
d,(x
t
,xs,x
un
,x
ue
)与分别为海水温度、海水盐度、南北方向流速、东西方向流速的真实值与模型预测值。
[0025]
本发明具有以下有益效果及优点:
[0026]
1.在神经网络建模过程中联合了多种海洋要素场信息,为要素场预测提供了更加完备的信息支撑;
[0027]
2.在神经网络建模过程中考虑了三维海洋要素场信息,为要素场预测提供了不同层海洋水体间相互作用的信息支撑;
[0028]
3.提高了海洋环境状态预测精度。
附图说明
[0029]
图1是本发明的总体流程图;
[0030]
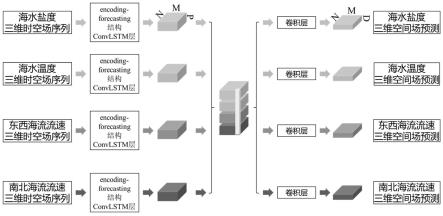
图2是本发明的模型结构图;
具体实施方式
[0031]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方法做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
[0032]
除非另有定义,本文所使用的所有技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
[0033]
如图1所示,本发明一种基于深度神经网络的海水温度、盐度与流速的三维时空场联合预测方法包括如下步骤:
[0034]
步骤一:从glbv0.08-53.x数据集获取hycom海洋数值模式输出的需要处理的三维空间场历史时序数据。
[0035]
步骤二:将维度为(k,m,n,d)的三维空间场海水温度、盐度与流速历史时序观测数据进行标准化处理,其中k为输入数据时间序列中的时间步数,m为输入数据在纬向上的长度,n为输入数据在经向上的长度,d为输入数据对应三维空间场中的层数。所用的标准化处理方法为z=(x-μ)/σ,μ)/σ,其中x为原始数据,z为标准化处理后的数据,n为样本数量。实验中k=16,m=32,n=32,d=10;
[0036]
步骤三:将标准化处理后的数据集分割为训练样本集、验证样本集与测试样本集,其中训练样本集为全部数据集的70%,验证样本集为全部数据集的15%,测试样本集为全部数据集的15%;
[0037]
步骤四:设置人工神经网络模型训练终止条件,包括最大迭代次数、最佳训练时间、最小代价函数值、最小训练梯度值等。所用的代价函数为其中g=m
×n×
d,(x
t
,xs,x
un
,x
ue
)与分别为海水温度、海水盐度、南北方向流速、东西方向流速的真实值与模型预测值。实验中最大迭代次数为100,最佳训练时间为1hr,最小代价函数值为1e-2
,最小训练梯度值为1e-6
;
[0038]
步骤五:利用训练样本集与验证样本集对人工神经网络模型进行训练与参数选取,其中人工神经网络模型首先利用encoding
–
forecasting结构convlstm网络实现对海水温度、盐度与流速等每种要素历史时间序列深层特征的提取;其次在神经网络中联合各要素对应的深层特征,为各要素空间场预测提供融合关联要素特征的完备信息;之后通过对联合特征进行卷积操作获得各要素三维空间场预测结果。在训练过程中达到最大迭代次数,或最佳训练时间,或最小代价函数值,或最小训练梯度值时终止训练,防止训练过拟合;
[0039]
步骤六:利用测试样本集对神经网络预测性能进行评估,利用代价函数评价指标,通过神经网络对在训练过程中没有使用到的测试样本的预测结果评估神经网络的泛化能
力;
[0040]
步骤七:利用步骤一中的标准化处理方法计算出的μ与σ值,对进行预测的数据进行标准化处理。神经网络输入各要素标准化处理后的三维时空场序列,输出下一时刻各要素对应三维空间场预测值,实现对各要素的联合预测。
[0041]
如图2所示,本发明一种用于三维空间场海水温度、盐度与流速联合预测的深度学习模型中所述模型的具体模型结构如下:
[0042]
将每种要素此前k个连续时间步长的三维空间场的时间序列都分别输入到一个encoding
–
forecasting结构convlstm网络,每种要素的网络输入数据维度为(k,m,n,d)。其中每个convlstm在进行卷积操作时所用的卷积核的尺寸为3
×3×
d,所用的每个convlstm网络隐藏层状态数量为p。convlstm网络的输出维度为(m,n,p)。实验中p=32。
[0043]
为了在预测过程中联合多种海洋要素的特征,之后将前述的每个要素对应的convlstm网络输出的深层特征沿特征通道方向进行拼接,得到维度为(m,n,4
×
p)的联合特征。之后对于每种要素,通过一个卷积层得到未来1个时刻的三维空间场的预测输出,将构造的联合特征作为卷积层的输入,在进行卷积操作时所用的卷积核的尺寸为3
×3×
(4
×
p),所用的卷积滤波器数量为d。每种要素对应卷积层的输出维度为(m,n,d)。以此构造一个用于时间序列预测的自回归神经网络。
[0044]
以上说明所描述的实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变换和改进。这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1