一种基于海面高度异常和旋转速度的中尺度涡识别方法与流程
1.本发明涉及旋涡识别技术领域,具体而言,涉及一种基于海面高度异常和旋转速度的中尺度涡识别方法。
背景技术:
2.1、海洋与中尺度涡
3.海洋和大气一样是一个基本的湍流系统。我们对海表面变化观察可以发现,最明显的是在海洋各处充满了各种中尺度的涡旋(eddies)和蜿蜒的曲流(menders)。这种环流实际是由中尺度海洋现象变化所主导的,主要包括海洋涡旋、孤立的偶极子、曲流以及锋面、射流等。中尺度涡是以长期封闭环流(涡旋)为特征的大尺度稳定环流的一种扰动,时间尺度从数天到数百天,空间尺度从几十公里到几百公里。大尺度环流的斜压不稳定、环流与地形的相互作用以及风的直接强迫是海洋中尺度涡产生的主要强迫机制。
4.大量中尺度涡的发现使人们认识到,大洋环流的结构要比传统认识的更为复杂。研究发现充斥于海洋中的这许许多多的涡旋,与大洋环流之间有着强烈的相互作用,其旋转速度一般都较快,并且一面旋转,一面在海洋中移动。海洋中尺度涡往往携带很大的动能,其能量要比平均流高出一个量级甚至更多。而且涡旋内部的温度和盐度异常随着涡旋的移动而移动,因此涡旋的运动可以造成纬向热量和盐度的净输运;这种涡旋输送的热通量对海洋的热平衡起着至关重要的作用。中尺度涡还能把下层的营养盐带到上层海洋中从而影响生态群落、浮游生物数量及生产率,并且影响化学元素的循环和流通。
5.在北半球,逆时针旋转的气旋涡在科式力的作用下,海表面处的水体向外辐散,海表面高度为负异常,并在涡旋中心形成垂直而上的水体运动,使得其内部水体降温;对于顺时针旋转的反气旋涡,则相反,海表面高度为正异常,内部水体增温。所以,在北半球,气旋涡也称之为冷涡,反气旋涡也称之为暖涡。涡旋的大部分能量来自平均流的斜压不稳定,但是在涡动能较低的海域,风应力的变化作为直接强迫机制作用于海洋涡旋。涡旋可以反馈能量和动能给背景场流并且对海洋的深部环流产生影响。
6.2、基于高度计数据的中尺度涡探测
7.自1992年topex/poseidon卫星发射以来,卫星高度计已经提供了时间序列超过25年、全球覆盖、高精度的海面高度场和海洋环流数据。在现代海洋研究中,高度计常与其他卫星任务、现场测量或者数值模式进行联合,其已为海洋现象观测做出了重大贡献。根据海面高度场的变化特征,涡旋中心海面高度表现为正异常则为反气旋涡,负异常则为气旋涡;或者基于海洋环流特征,涡旋顺时针旋转的环流为反气旋涡,逆时针旋转的环流为气旋涡。多源海面高度融合产品可以有效提高对海洋中尺度现象的观测,基于多源高度计数据融合的海面高度产品研究显示中尺度涡在全球海洋中盛行。
8.在基于高度计数据的中尺度涡探测研究方面,先后出现了okubo
‑
weiss参数探测方法(okubo,1970;weiss,1991)、winding
‑
angle探测方法(chaigneau et al.,2008)和矢量几何vector geometry法(nencioli et al.,2010)等。其中,okubo
‑
weiss参数探测方法
由地转流定义okubo
‑
weiss参数阈值来识别判断中尺度涡。winding
‑
angle探测方法根据对海面高度异常(sla)值分布的逐步搜索实现对中尺度涡的自动识别,其中chelton et al.(2011)提出的海面高度自由等值线算法与此类似,但是其能将多个涡旋中心识别成一个涡旋。随后,yi et al.(2017)等升级了这种算法,可以将多个中心的涡旋分割识别成单核心的独立涡旋结构。vector geometry法利用地转流速u和v分量的空间分布特征来识别中尺度涡,该方法最近这些年常被广泛的应用于高分辨率数值模式结果的涡旋识别;le vu et al.(2018)发展了该方法,将其应用到地中海涡旋探测识别当中,并且分发了地中海的涡旋探测识别结果产品。上述涡旋识别方法在中尺度涡高度计探测中均已得到了应用,部分方法之间的优缺点也有比较,大部分结果显示直接基于sla数据的涡旋探测结果具有一定的优势。
技术实现要素:
9.本发明是这样实现的:
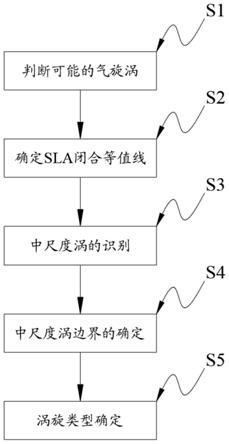
10.一种基于海面高度异常和旋转速度的中尺度涡识别方法,包括以下步骤:
11.s1、判断可能的气旋涡、针对空间分辨率为0.25
°
海面高度异常(sla)数据,首先在一个1
°×1°
经纬度移动窗口内通过寻找sla局地最小或者最大值,从而来判断可能的气旋涡或反气旋涡的中心;
12.s2、确定sla闭合等值线、通过对每一个可能的气旋涡或反气旋涡中心,从其内部以1cm的增幅或减幅向外寻找sla闭合等值线,确定出满足以五点条件的sla闭合等值线:
13.(1)针对气旋涡或者反气旋涡,闭合等值线内所有网格点的sla值都要比闭合等值线的sla值要小或者大;
14.(2)闭合等值线内网格点不少于8个,且不超过1000个;
15.(3)针对气旋涡或者反气旋涡,闭合等值线内仅有1个sla局地最小或者最大值;
16.(4)闭合等值线的sla值与其内部sla局地最小或者最大值相差不小于3cm;
17.(5)闭合等值线内任意网格点距离要小于600km;
18.s3、中尺度涡的识别、针对每一个可能的气旋涡或者反气旋涡的中心,如果确定不出满足步骤2的sla闭合等值线,则说明基于该sla局地极值并不能识别出中尺度涡,则舍弃该极值点;
19.如果能确定出满足s2中的一条或者多条sla闭合等值线,说明闭合等值线内区域可能对应一个中尺度涡;
20.此时,针对s2中确定出的sla闭合等值线,选择旋转速度u不小于涡旋移动速度c的最外闭合等值线作为中尺度涡边界;
21.闭合等值线的旋转速度u是指等值线上每个点地转速度异常闭合等值线的旋转速度u是指等值线上每个点的转速度异常的平均值,单位cm/s,u
′
和v
′
分量分别表示地转流异常的水平和垂直分量:
[0022][0023]
[0024]
其中,g是重力加速度,f是科氏参数,和分别是水平和垂直方向的距离的平均值,单位cm/s,u
′
和v
′
分量分别表示地转流异常的水平和垂直分量;
[0025]
s4、中尺度涡边界的确定、如果s2确定出的sla闭合等值线均不符合s3中的中尺度涡边界条件,那么说明sla闭合等值线内区域不能确定为一个中尺度涡;反之,如果某一sla闭合等值线符合条件确定为中尺度涡边界,那么说明该闭合等值线内的封闭区域确定为中尺度涡,s1确定的sla局地极值为涡旋中心,该闭合等值线即为涡旋边界;
[0026]
s5、涡旋类型确定、如果确定出的涡旋边界的sla值大于涡旋中心sla值,那么该涡旋为反气旋涡;如果涡旋边界sla值小于涡旋中心sla值,那么该涡旋为气旋涡;
[0027]
进一步的,所述中尺度涡各属性定义为:
[0028]
涡旋的面积a表示的是包含在涡旋边界内区域的面积,半径r为具有相同面积的圆的半径:
[0029][0030]
并且将s2中确定出的所有sla闭合等值线中那条具有最大旋转速度的等值线内的区域定义为涡旋核心区域,涡旋核心区域的面积定义为a
core
,最大旋转速度半径记为r
maxu
;
[0031]
中尺度涡振幅强度定义为涡旋中心sla
center
和涡最外边界sla
edge
差值的绝对值:
[0032]
am=|sla
center
‑
sla
edge
|
ꢀꢀꢀ
(式4)
[0033]
中尺度涡能量采用涡动能的大小及空间分布来表示:
[0034][0035]
涡旋能量密度是单位面积的涡动能:用来表示涡旋单位面积的能量强度;中尺度涡的涡度ξ,即数学中的旋度,计算如下:
[0036][0037]
进一步的,所述s3中,涡旋捕获的水体外边界由涡旋旋转速度u与移动速度c的比值决定,当这个比值大于1时,涡旋是非线性的,其内部水体随着涡旋同时移动,非线性是中尺度涡的重要特征。
[0038]
本发明的有益效果是:
[0039]
通过本发明的识别步骤,能够有效识别处海洋中的中尺度涡,并通过计算准确的确定出中尺度涡的外边界范围以及涡旋类型的确定,为人类发现和开发利用中尺度涡提供了精确的指导基础。
附图说明
[0040]
为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0041]
图1为本发明的识别方法流程图;
[0042]
图2为本发明的涡旋识别算法的示意图;
[0043]
图3为本发明的闭合等值线归一化正圆后的平均流速分布图;
[0044]
图4为本发明的涡旋闭合等值线旋转速度u与涡中心距离的分布曲线图;
[0045]
图5为本发明的涡旋尺度定义示意图;
[0046]
图6为本发明的涡旋核心区域示意图。
具体实施方式
[0047]
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
[0048]
因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
[0049]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0050]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0051]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0052]
实施例
[0053]
一种基于海面高度异常和旋转速度的中尺度涡识别方法,包括以下步骤:
[0054]
s1、判断可能的气旋涡、针对空间分辨率为0.25
°
海面高度异常数据,首先在一个1
°×1°
经纬度移动窗口内通过寻找sla局地最小或者最大值,从而来判断可能的气旋涡或反气旋涡的中心;
[0055]
s2、确定sla闭合等值线、通过对每一个可能的气旋涡或反气旋涡中心,从其内部以1cm的增幅或减幅向外寻找sla闭合等值线,确定出满足以五点条件的sla闭合等值线:
[0056]
(1)针对气旋涡或者反气旋涡,闭合等值线内所有网格点的sla值都要比闭合等值线的sla值要小或者大;
[0057]
(2)闭合等值线内网格点不少于8个,且不超过1000个;
[0058]
(3)针对气旋涡或者反气旋涡,闭合等值线内仅有1个sla局地最小或者最大值;
[0059]
(4)闭合等值线的sla值与其内部sla局地最小或者最大值相差不小于3cm;
[0060]
(5)闭合等值线内任意网格点距离要小于600km;
[0061]
该方法将chelton et al.(2011)识别涡旋的1cm截断振幅(条件(4),涡旋边界闭合等值线sla值与sla局地极值的差值)提高为了3cm,这样避免很多长条状的涡旋结构。我们观察了很多海洋涡旋的sla图像,发现3cm以下识别出的涡旋很多都是一些长条或者不规则状的结构,为了尽量减少这些不规则状结构的干扰,我们将涡旋振幅提高到了3cm。另一个原因是,就目前测高精度最高的高度计数据jason系列而言,其在公开大洋中的测高精度大约在2cm。尽管这里aviso采用多颗高度计数据进行融合,我们很难说海洋中低于2cm的海洋现象在融合数据集中能刻画的非常准确,尤其是在插值出的没有直接观测点的轨道间隙区域。考虑这些,我们决定将全球涡旋的识别振幅提高到3cm,这样一来提高了涡旋识别的准确度和有效避免了扁平状的涡旋结构。
[0062]
s3、中尺度涡的识别、针对每一个可能的气旋涡或者反气旋涡的中心,如果确定不出满足步骤2的sla闭合等值线,则说明基于该sla局地极值并不能识别出中尺度涡,则舍弃该极值点;
[0063]
如果能确定出满足s2中的一条或者多条sla闭合等值线,说明闭合等值线内区域可能对应一个中尺度涡;
[0064]
此时,针对s2中确定出的sla闭合等值线,选择旋转速度u不小于涡旋移动速度c的最外闭合等值线作为中尺度涡边界,如图2所示;
[0065]
闭合等值线的旋转速度u是指等值线上每个点地转速度异常闭合等值线的旋转速度u是指等值线上每个点的转速度异常的平均值,单位cm/s,u
′
和v
′
分量分别表示地转流异常的水平和垂直分量:
[0066][0067][0068]
其中,g是重力加速度,f是科氏参数,和分别是水平和垂直方向的距离的平均值,单位cm/s,u
′
和v
′
分量分别表示地转流异常的水平和垂直分量;
[0069]
如图2、3所示的,涡旋识别过程中一个非常重要的部分就是涡旋尺度的确定,即涡旋边界的定义。chelton et al.(2011)在全球涡旋研究中采用了最外闭合等值线,而另一部分建议采用旋转流速最大闭合等值线的方法(nencioli et al.,2010)。单纯的只靠sla最外层闭合的等值线去定义涡旋边界是不准确的,并且扩大了涡旋的范围,其最外部的一些水体虽然与涡旋呈现完好的等值线分布特征,但是那些水体有可能不能被涡旋有效的捕捉到而随着涡旋移动。schlax and chelton(2016)认为依靠最大流速所确定的涡旋尺度和范围实际上对应的应该是涡旋核中心,其实际的捕捉有效水体范围应该更广。chelton et al.(2011)也认为这种最大旋转速度的涡旋边界的定义实际上对应涡旋的高斯拟合尺度,对应的是涡旋涡核中心。同时,取最大流速的sla闭合等值线这样的做法使得涡旋结构本身具有完整性而且其整个涡旋水体结构更具有一致性,保证了识别的涡旋内部都是其所捕捉到的有效水体;但是往往很多涡旋的最大线速度可达0.5m/s,这时依靠最大线速度识别的涡旋明显要小于涡旋捕获的实际水体范围。
[0070]
海洋中尺度涡本质上指的是涡旋内的水体可以保持其自身水体特性并且随着涡旋在海洋中移动。因此涡旋边界的合理定义应为涡旋捕获到的水体的边界。涡旋捕获的水
体外边界由涡旋旋转速度u与移动速度c的比值决定,当这个比值大于1时,涡旋是非线性的,其内部水体随着涡旋同时移动。而且,尽管chelton et al.(2011)中使用的是最外闭合等值线方法,但他们通过比较了涡旋旋转速度u与涡旋移动速度c的比值u/c,认为非线性(u/c>1)是涡旋的重要特征。涡旋的非线性意味着,一个旋转着的涡旋可以捕获其内部的水体,并且携带着涡旋内的热盐、能量以及生物化学物质在海洋中移动。因此,这里我们将涡旋捕获的水体范围定义为涡旋旋转速度u大于移动速度c的水体,就是选择旋转速度大于移动速度的最外闭合等值线作为涡旋的外边界。
[0071]
在全球范围内,我们随便选择了一天的sla图像,比较了基于最外闭合等值线(outermost contour,oc)、最大旋转速度等值线(maximum u contour,muc)、以及旋转速度u大于移动速度c等值线(u exceeds c contour,uec)三种方法确定的涡旋边界的结果,结果如图4所示。可以看出旋转速度越大的涡旋多呈现抛物线分布特征,也就是说许多涡旋的最大旋转速度不一定是在涡旋的最外边界,而是在涡旋的中间某处。统计显示,在全球识别的2796个涡旋中,有超过一半的涡旋(1599个,约58%)最大速度等值线不为其最外闭合等值线。平均而言,最大速度等值线基本是在0.7倍的涡旋半径处,也就是说基于最大旋转速度的涡旋边界确定方法muc会比我们采用的uec方法识别出的涡旋面积小了近一半。当然对于强流区(比如西边界流区域),这种涡旋尺度差距更加明显,最大速度的涡旋半径平均仅为实际涡旋半径的一半,这就意味着两种方法确定的涡旋面积可能相差超过4倍。
[0072]
不考虑涡旋的旋转速度与移动速度关系的最外闭合等值线的涡旋识别(oc方法),显示出很多旋转速率非常慢的涡旋。图4虚线显示了等值线最大旋转速度小于移动速度的涡旋,这些涡旋约占识别出的总涡旋数目2796的10%左右,多集中在低纬度区域。虽然,这里相对应的涡旋移动速度可能也并不高,但是我们很难有把握的说这样旋转速率非常慢的涡旋会有效的捕捉到海洋中的水体并随着自身在海洋中移动。因此为了考虑涡旋属性更加的稳定和均一性,我们在uec方法中移除了这些涡旋最大旋转速度小于移动速度的涡旋(图中虚线涡旋)。而对于那些涡旋最大旋转速度超过移动速度,而最外闭合等值线旋转速度小于移动速度的涡旋(图中没有给出这样的涡旋),我们重新确定了其涡旋的外边界,使确定出的最外等值线旋转速度大于等于其移动速度。这样一来,减少了涡旋错误识别以及将瞬时湍流识别成涡旋的可能性,并且增加了涡旋的结构统一性和识别的准确性。
[0073]
s4、中尺度涡边界的确定、如果s2确定出的sla闭合等值线均不符合s3中的中尺度涡边界条件,那么说明sla闭合等值线内区域不能确定为一个中尺度涡;反之,如果某一sla闭合等值线符合条件确定为中尺度涡边界,那么说明该闭合等值线内的封闭区域确定为中尺度涡,s1确定的sla局地极值为涡旋中心,该闭合等值线即为涡旋边界;
[0074]
s5、涡旋类型确定、如果确定出的涡旋边界的sla值大于涡旋中心sla值,那么该涡旋为反气旋涡;如果涡旋边界sla值小于涡旋中心sla值,那么该涡旋为气旋涡;
[0075]
中尺度涡各属性定义为:
[0076]
涡旋的面积a表示的是包含在涡旋边界内区域的面积,半径r为具有相同面积的圆的半径,如图5所示:
[0077][0078]
并且将s2中确定出的所有sla闭合等值线中那条具有最大旋转速度的等值线内的区域定义为涡旋核心区域,如图6所示,涡旋核心区域的面积定义为a
core
,最大旋转速度半
径记为r
maxu
;
[0079]
中尺度涡振幅强度定义为涡旋中心sla
center
和涡最外边界sla
edge
差值的绝对值:
[0080]
am=|sla
center
‑
sla
edge
|
ꢀꢀꢀ
(式4)
[0081]
中尺度涡能量采用涡动能的大小及空间分布来表示:
[0082][0083]
涡旋能量密度是单位面积的涡动能:用来表示涡旋单位面积的能量强度;
[0084]
中尺度涡的涡度ξ,即数学中的旋度,计算如下:
[0085][0086]
s3中,涡旋捕获的水体外边界由涡旋旋转速度u与移动速度c的比值决定,当这个比值大于1时,涡旋是非线性的,其内部水体随着涡旋同时移动,非线性是中尺度涡的重要特征。
[0087]
以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1