用于采摘银杏花穗的末端执行器的采摘部分的设计方法
1.本发明创造属于林业机械技术领域,具体是一种用于采摘银杏花穗的末端执行器的采摘部分的设计方法。
背景技术:
2.常见的果蔬采摘机器人的机械系统是由行走机构、机械臂和末端执行器组成。
3.采摘银杏花穗,银杏是乔木,且是珍稀树种,银杏从种植到能够开花结果需要几十年的时间,所以在采摘是尽可能不伤害到短枝叶片;银杏花穗体型较小且本体脆弱,这对末端执行器有很高的控制要求,传统的采摘机器人就不满足采摘银杏花穗的要求。对于种植园内的嫁接雄株银杏,银杏这种大型乔木与种植的蔬菜不同,大部分蔬菜都是一年生的,所以在收获果实前,可以将作物的茎叶去除后,可减少对采摘的干扰。但是银杏的生长周期很长,所以在采摘花穗时,要尽可能不损害叶片和短枝。
4.采摘机器人的核心技术是末端执行器的设计,末端执行器直接作用于采摘目标,在农林业生产过程中被采摘的果实一般都比较脆弱,并且同种果实的形状与生长情况都各不相同,所以末端执行器的结构和力学性能都要准确。同时在采摘过程中果实和作物的枝条叶片很容易被损伤,如对果实的位置判断错误或者是定位不够准确;末端执行器抓握机构对目标的夹持力超过目标得最大承受力;末端执行器抓取不稳定,果实会易脱落,造成采摘的浪费,从而导致采摘效率的降低。对于抓握动作,若采用传统的末端执行器抓取,往往会因抓取力或夹持力过大而压伤果实,因此末端执行器结构的设计以及对末端执行器的控制十分重要。
技术实现要素:
5.由于本发明的研究的采摘对象是银杏花穗,并且银杏树枝短枝上既长有银杏花穗,也长有银杏树叶,且形状、体积和颜色大小也都差不多。
6.通过实地银杏的观察以及对花穗叶片的力学测试,整理分析数据,发现采摘银杏花穗需要的力大约是叶片的三分之一,为了避免伤害到叶片和短枝,则用滚筒刷将花穗采摘下来。
7.本发明研究银杏花穗智能采摘系统的末端执行器的机械口腔部分,具体实现将采摘机构将目标花穗从所在枝条分离的动作的方案与机械结构设计,并在虚拟仿真环境中进行采摘验证。
8.本采摘末端执行器是以银杏花穗为采摘对象,末端执行器仿生博比特虫的捕猎,其中:
9.仿生博比特虫的口器是抱爪机构,抱爪机构连接在机械臂末端,用来把机械臂与被采摘花枝粗定位。
10.仿生博比特虫的口腔是采摘部分,采摘机构连接在机械臂末端,用来把被采摘花穗包裹并从花枝上分离下来,最后送入传送管道直到收集箱。
11.仿生博比特虫的虫身是回转机构,回转机构连接在机械臂与采摘机构之间,用来调整采摘机构与花穗之间的位置。
12.本发明主要涉及末端执行器的采摘部分,其仿生博比特虫的口腔部分,负责采摘花穗和“吞咽”花穗。
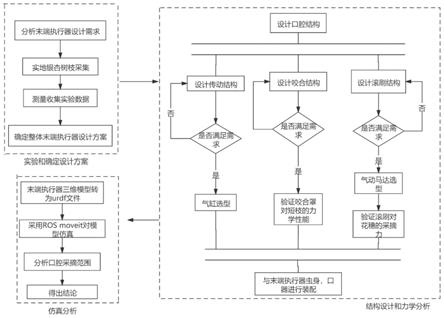
13.首先分析整体末端执行器的设计需求,整合口腔、虫身、口器三个仿生部分的设计不同需求;然后进行实地实验,收集银杏花穗、叶片和短枝的尺寸及力学数据。
14.通过对博比特虫吞食猎物口腔动作的观察研究,以及对已有的采摘机器人末端执行器研究,提出一种末端执行器机械采摘部分(即仿生口腔部分)的设计方案,再进行传动机构和采摘机构的具体设计,同时分析结构是否满足机械口腔结构的设计要求,并根据需要改进结构。然后通过solidworks建立末端执行器口腔的三维模型,安装sw2.urdf插件,在三维模型中插入坐标系和基准轴,最后将建立好的urdf文件导入ros moveit仿真环境中,进行末端执行器采摘部分(即仿生口腔部分)仿真采摘银杏花穗,整理分析仿真结果。
15.为了描述术语一致,以下采用“口腔”表示“采摘部分”。
16.本设计方法的步骤为:
17.1、力学及几何数据采集
18.银杏花穗及叶片的物理特性是设计末端执行器机构的基础,为了更好的对末端执行器进行设计,需对银杏花穗和银杏树枝的物理特性进行分析,其物理特性主要包括几何尺寸与形状、质量、力学性能等几个方面。
19.1.1银杏花穗的几何特征
20.本末端执行器的设计是以银杏花穗为基本依据的,其机械特点以及机构尺寸的确定均需要符合银杏花穗的几何特性。
21.采集成熟的银杏花穗的树枝,以一个短枝的花穗为一组数据,每个短枝的花穗个数和叶片个数是不同的。
22.由于不同短枝的银杏花穗和叶片的大小不同,所以采集不同的银杏树的树枝,测出有100组数据。实验需要测量是花穗的长度以及最大直径,因为银杏花穗的形状是纺锤形,体积叶很小,并且花穗本体也比较脆弱,所以实验时直接用直尺进行测量。在测量过程中发现,银杏树枝不同短枝的粗细长短也有差别,叫长的短枝上面的花穗和叶片数量较多,叶片也更为成熟。短枝粗细长短也是影响末端执行器结构设计的重要因素之一;所以尽量进行更多的实验,实验对象尽量来自不同的银杏树和不同的树枝,提高实验的普遍性,提高实验的准确性。
23.经统计,银杏花穗的长度一般在24mm
‑
27mm之间,最大直径一般在5mm
‑
7mm之间,这为末端执行器的手指夹持机构的设计提供了数据支持。每个短枝上的花穗数量为4
‑
6个,也有多个叶片,由于花穗叶片在短枝上生长不规律,定位比较困难,所以末端执行器不可能每次就采摘一个花穗,需要将整个短枝上的花穗和叶片全部吞入,在通过采摘需要的力进行分辨花穗和叶片,这种方式也能大大提高采摘效率。
24.1.2银杏短枝的间距
25.银杏短枝的间距决定了末端执行器口腔夹持机构张开的直径,所以需要测量短枝间距。相邻的短枝并不在同一水平面上,在采摘完一个短枝在采摘相邻的短枝,需要虫身需要调整位置角度,导致采摘效率较低,所以在末端执行器进行采摘时,优先采摘相近平面夹
角<45
°
的短枝。实验时测量银杏相近平面夹角<45
°
的短枝间距。
26.经统计,在相近平面夹角<45
°
的短枝间距大约是是80mm
‑
100mm,所以末端执行器开始采摘一个短枝上的花穗时,口腔从张开到闭合过程中不能干涉到相邻的花穗,所以末端执行器张开最大范围的半径也必须<100mm,同时为了确保能将短枝上的花穗叶片全部吞入口腔内,末端执行器张开最小范围的半径必须>30mm,综上末端执行器口腔张开半径是30mm
‑
100mm。
27.1.3银杏花穗和叶片的力学性能
28.末端执行器口腔部分主要是吞咽作用,将银杏花穗吞咽后将花穗采摘下来,需要测量采摘花穗的力,而我实验时裁剪下的银杏枝条上每个短枝上有3~5花穗,但每个短枝上也有4~6片银杏叶,而采摘银杏花穗为减少叶片被采摘的干扰,并且尽可能减少对叶片的损伤,所以同时也要测采摘银杏叶片的力。
29.花穗和叶片都是生长在短枝上,末端执行器在采摘花穗时,不可避免会接触到短枝,为了防止末端执行器在闭合时会夹断短枝,要测出折断短枝所需要的力。
30.采用平拉式来进行拉伸实验,实验中,通过用测力计测得100组银杏花穗和叶片的采摘力。测量拉力的实验仪器是alipo数显推拉力计,型号:zp
‑
500,量程:500n,最小读数:0.001n。
31.使用该数显拉力计需要同时配合使用电脑软件使用测得100组数据。经统计,采摘银杏花穗的力是 0.8n
‑
1.3n,采摘叶片的力是3n
‑
4.3n,短枝折断需要的力超过20n,因为采摘花穗时要尽量不会伤害到叶片,并且末端执行器不能夹断短枝,所以采摘叶片最小的力约为3n,采摘花穗的力必须小于3n,采摘花穗最小的力约为1n。末端执行器夹住短枝时,对短枝施加的力必须小于20n。
32.2、方案设计
33.本发明设计末端执行器口腔部分利用仿生学,模仿博比特虫捕食。
34.博比特虫能够准确高效地进行捕猎,源于它锋利强劲的嘴部。博比特虫的嘴部有一种无肌肉的口器,口器是两边锋利的勾爪,像几瓣镰刀。在捕捉到猎物后,勾爪会紧紧咬住猎物后,在杀死猎物后,博比特虫的口腔吸住猎物,通过勾爪不断内外翻转,将猎物送进口腔。
35.通过模仿博比特虫头部结构,本发明设计的末端执行器口腔主要有咬合花穗、分离花穗、吞咽花穗三个功能。
36.(1)咬合功能:通过模仿博比特虫,设计出口腔的咬合机构,能够准确咬合包裹住花穗;
37.(2)分离功能:通过模仿博比特虫抓住猎物后用勾爪由外向内翻转将猎物吞进体内,设计末端执行器口腔咬合包裹花穗后,将花穗从短枝上分离,实现分离的功能;
38.(3)吞咽功能:通过模仿博比特虫将猎物通过喉部咽进身体,喉部呈空管状,避免食物被堵塞在喉部;因此分离后的花穗,从口腔内部的管道通过虫身进入收集箱,口腔内部没有障碍阻挡花穗进入末端执行器的虫身。
39.2.1末端执行器口腔构型的设计
40.末端执行器口腔的构型主要取决于咬合结构,口腔采摘花穗的第一个动作就是咬合,其构型取决于花穗的特征。银杏花穗形状类似纺锤体,体型非常小,且花穗茎部脆弱,所
以末端执行器口腔在咬合过程中最好能够包裹住短枝上的所有花穗和叶片,这样可以增大末端执行器的咬合机构与花穗叶片的接触面积,从而减小了花穗受到压力,可以更好的控制抓取力的大小,同时也以保护叶片和短枝不受到损伤,避免末端执行器在移动过程中被树枝刮到。
41.末端执行器口腔咬合机构设计为回转型。通过花穗和叶片的力学性能测量的结果可知采摘花穗的力约为1n和叶片的力约为3n,叶片需要的力是花穗的3~4倍,但都非常小。回转结构可以调节机构的开关闭合角度,并且具有较大的咬合范围。咬合机构设计成回转结构,末端执行器口腔可以设计成超过两指的结构(例如三指),这样能够更好的咬合且包裹住花穗和叶片,并且不会伤害到叶片以及短枝。尽管回转结构比平动型复杂,并且会带来一些咬合的误差,但是可以通过控制来补偿这些误差。
42.因此,本发明设计的末端执行器口腔咬合结构设计为无关节旋转弧面机构。
43.2.2分离花穗方式的设计
44.本发明的末端执行器口腔实现咬合采用的回转机构,在完成花穗和叶片的咬合固定后,接下来的动作是将花穗从短枝上分离,用是梳刷的方式,在执行器口腔内安装类似于刷子的结构,在咬合住花穗后,驱动刷子将花穗从短枝上刷下来。
45.本发明的是采摘的银杏花穗的末端执行器,花穗不同于蔬菜水果,其尺寸和重量都非常小,为了咬合机构能更好的包裹固定住花穗,采用三指机构,并且在机构上再采用梳刷原理的装置,分离花穗。
46.末端执行器口腔关节的数量与抓取效果相关,如果关节数量越多,咬合结构的自由度就越多,动作就越灵活,抓取效果就越好。但是关节越多,就需要更多的驱动装置,驱动装置越多,末端执行器结构越复杂,控制难度就越高,同时末端执行器内部有梳刷结构,所以末端执行器口腔设计成1个自由度。
47.2.3末端执行器的设计原则
48.本发明研究设计银杏花穗采摘末端执行器的机械口腔部分方案研究,在设计末端执行器口腔结构时的原则包括:
49.(1)末端执行器口腔机械结构有一定的封闭性
50.整个末端执行器在将花穗从短枝上采摘下来,进入口腔后,由于银杏花穗尺寸是20mm~30mm,非常小,所以需要一个咬合固定的保护罩(咬合罩),确保末端执行器口腔在采摘花穗时,花穗不会从口腔中脱落,提高末端执行器的采摘效率。
51.(2)驱动装置提供末端执行器的动力的合理性
52.因为银杏花穗采摘所需的力非常小,为了尽可能不损伤到叶片和短枝,末端执行器的抓取力要有一点的精确性,这就可能需要利用到减速器将驱动装置传动的力减小到需要的大小。其次就是提供末端执行器张开闭合的力,确保抓取的稳定性。
53.(3)末端执行器的机械结构要有足够的强度和稳定性
54.银杏树枝多且杂乱,末端执行器在采摘花穗过程会随时碰撞到一些小的树枝,所以末端执行器机械结构要有足够的强度和稳定性,在发生一些无法避免的碰撞依然可以完成采摘工作,而且末端执行器也不会受到损伤。
55.2.4末端执行器的驱动方案
56.气压驱动装置利用压缩空气的压力来驱动执行器的运动,通常使用空气压缩机作
为动力源。气动驱动装置安全性高,结构简单。通过调节气压,可以实现无级调速,但是工作速度的稳定性差,装置大,定位精度不高,抓地力小。
57.本发明将采摘下来的银杏花穗,通过空气抽吸的方式将花穗吸进收纳容器,采用的是气压驱动装置,所以末端执行器也采用气压驱动,本发明主要用到两种气动驱动装置:气缸和气动马达。气动马达在工作中不会漏电,也不会产生电火花,因为采摘花穗时,花粉爆开,末端执行器处于粉尘环境中,气动马达也不会发生爆炸,即便在空气潮湿环境中也很安全。气动马达能进行长期工作,具有过载保护的性能;气动马达体积小,重量轻,单位尺寸功率小,能够通过调节气压实现无级变速,并且能够装在体积较小的末端执行器中。
附图说明
58.图1是本设计方法的流程示意图;
59.图2a是本设计方法设计得到末端执行器口腔的结构示意图;
60.图2b是图2a的另一个视角的示意图;
61.图中:夹爪1、夹爪底座2、咬合罩3、缺口4、刷滚5、气动马达6、气缸6、圆柱销7、连杆头8、连杆座9、漏斗10、管道11、连接块12;
62.图3a是初步设计中,末端执行器口腔内的手指机构和传动结构的简图;
63.图中:手指13、连杆14、连接拉杆15、底座16、拉索17、拉索针18;
64.图3b是初步设计中,咬合罩的结构简图;
65.图3c是初步设计中,咬合罩与手指连接的结构简图;
66.图3d是初步设计中,滚筒毛刷结构示意图;
67.图3e是初步设计中,滚筒毛刷结构传动图;
68.图中:滚筒毛刷19、圆锥齿轮20、小型气动马达21;
69.图3f是改进设计的末端执行器口腔外部传动简图(咬合罩完全闭合);
70.图3g是改进设计的末端执行器口腔外部传动简图(咬合罩最大张开);
71.图3h是改进皇后的刷滚示意图;
72.图3i是改进后的刷滚安装示意图;
73.图3j的漏斗的结构示意图;
74.图3k是咬合罩处于张开状态正对花穗(末端执行器口腔正对着花穗);
75.图3l是咬合罩正对咬合花穗(末端执行器口腔正对着花穗);
76.图3m是咬合罩初始状态(末端执行器口腔斜对着花穗);
77.图3n是完全咬合花穗状态(末端执行器口腔正对着花穗);
78.图3o是末端执行器口腔咬合罩与短枝接触时的受力图;
79.图4a是ros环境中的模型示意图;图4b是末端执行器初始状态示意图;
80.图4c是末端执行器完全包裹花穗示意图;
81.图4d是末端执行器与短枝夹角不为0的初始状态示意图;
82.图4e是末端执行器与短枝夹角不为0的咬合状态示意图。
具体实施方式
83.下面结合具体实施方式对本设计方法进一步说明:
84.末端执行器口腔结构设计
85.在采摘过程,机械臂带动末端执行器运动到指定位置,末端执行器的通过模仿口器的机构抓住具体的银杏树枝;然后末端执行器的模仿虫身段机构运动接近短枝;最后末端执行器的口腔进行银杏花穗的采摘,完成整个采摘过程。
86.1末端执行器口腔结构的初步设计
87.1.1手指和传动机构设计
88.在末端执行器口腔内部设计一个类似内骨骼的手指结构,内部连接一个传动机构,通过传动机构连接三个手指,相当于一个回转结构,如图3a为末端执行器口腔内的手指机构和传动结构的简图,由手指、连杆、连接拉杆、底座、拉索、拉索针组成。末端执行器口腔的手指机构的抓取夹持是整个口腔机构的第一步动作,只有抓取到花穗和叶片,才能进行后续采摘动作。
89.末端执行器手指机构和传动机构由执行部分和驱动部分组成,驱动部分由一个气缸和其它相关部件组成;气缸驱动拉索,通过拉索带动拉索针运动,拉索针与连接拉杆一起进行上下运动,从而驱动单连杆运动,连杆向下拉动,三根手指闭合,反之,三根手指张开。执行部分由三个手指组成,每个手指的尺寸形状都相同,两两手指间夹角为120度,同时连接在一个底座上。从图3a可知,手指的末端通过销轴连接在底座上,手指中间需要通过连杆连接一个中间的连接拉杆,通过连接拉杆的上下移动,来控制连杆的运动,从而能够控制手指进行张开闭合的运动。手指机构由同一个气缸驱动,所以三个手指必须同步运动。
90.1.2咬合机构设计
91.末端执行器口腔部分在分离花穗前,需要将短枝上的花穗和叶片要通过咬合机构咬合固定住,为了确保分离花穗的过程中,掉落的花穗不会从末端执行器中脱落,否则会导致采摘效率降低,所以咬合机构设计成一个咬合罩的形式。如图3b所示为咬合罩的结构简图,咬合罩的形状是类似椭圆的圆弧面,之所以不设计成平面类似钳的形状,是因为银杏花穗形状是纺锤体,叶片也是卷曲型,椭圆形的罩面在咬合花穗时,能适应不同短枝上花穗的生长分布情况,同时能够减少咬合对叶片的损伤。
92.三指机构的每个手指上都要连接一个咬合罩,如图3c所示为咬合罩与手指连接的结构简图,咬合罩与手指之间用一个曲柄滑块的结构连接,咬合罩末端安装在底座上,用销轴连接,手指在被连杆拉动的同时,咬合罩通过曲柄滑块结构随着手指共同运动,当滑块运动到最高点,咬合罩处于完全闭合状态;当滑块运动到最低点,咬合罩处于最大张开状态,滑块移动的范围决定咬合罩张开的最大范围。因为末端执行器口腔得开合是欠驱动,所以三个咬合罩也只能同时进行开合运动。
93.1.3梳刷结构设计
94.末端执行器口腔部分将花穗从短枝上分离的结构是利用梳刷的原理。有两种梳刷的形式可选择:一种是平板刷,另一种是滚筒刷,如果采用平板刷,则需要两个刷子,平行放置,工作原理:每个刷子末端都需要一个气缸驱动,两个刷子夹住花穗并进行上下连续移动,刷毛摩擦花穗,将花穗从短枝上分离。
95.银杏每个短枝上有4~6个花穗和4~6个叶片,但气缸活塞运动速度慢,所以平板
刷上下运转的频率低,导致分离花穗的工作效率低;而且需要在末端执行器上多安装两个气缸,整体质量增加,更优的方式是采用滚刷的梳刷方式。参考图3d和图3e,在每个手指末端安装一个如图3d所示的滚筒毛刷,每个手指上安装一个滚刷,在咬合罩包裹花穗后,三个滚刷一起转动,将花穗从短枝上刷下来完成分离。
96.银杏花穗和叶片采摘所需要的力是不同的,滚刷运转过程中进行筛选,可以通过控制滚筒毛刷的转速、毛刷的长度以及毛刷的材质,来区分花穗和叶片,本设计是末端执行器的一条原则就是确保尽可能只将银杏花穗刷下来,减少银杏叶片被刷下来,尽可能不伤害带叶片和短枝。如图3e所示为滚筒毛刷结构传动图,因为末端执行器整体选择的是气压驱动装置,所以选择气动马达来驱动滚筒毛刷转动,气动马达可以通过调节气压控制转速,控制很简单。根据手指结构和尺寸要求,选用符合规格的气动马达。
97.2末端执行器口腔结构设计完善
98.2.1传动结构的改进
99.上述末端执行器口腔的初步设计方案中,传动结构在口腔内部,小型零件较多,并且集中在口腔内。实际采摘银杏花穗的过程中,滚筒毛刷将花穗从短枝上分离,不会是完整的花穗,大部分都是花药,也会有部分花穗在口腔内直接爆出花粉,所以末端执行器口腔内部会是处于一个粉尘环境,加之吞咽收集花穗采用的是空气抽吸的方式,工作中会有花穗和花粉残留在销轴孔、连接拉杆孔内以及其它细小的零件内,随着末端执行器的连续工作,残留在口腔内的各关节内花药和花粉不断堆积,会导致连杆传动结构和曲柄滑块结构卡住,末端执行器口腔无法正常运转,就每隔一段时间需要清理一次末端执行器口腔,但会影响末端执行器的工作效率,也会对末端执行器结构造成损害。
100.因此末端执行器口腔内部尽量不要复杂结构,将传动机构设计在咬合罩外,如图3f和图3g所示为改进后的末端执行器口腔外部传动简图。改进后的末端执行器由咬合罩3、连杆、(小型)气缸6、连杆座9和夹爪底座2组成。咬合罩通过圆柱销连接连杆一端,连杆另一端连接气缸的活塞,气缸的气缸座底部连接连杆座,连杆座固定在夹爪底座上,气缸座连接气管通入一定的气压,推动活塞杆运动,活塞杆推动连杆控制咬合罩进行闭合运动。
101.图3f是咬合罩完全闭合的状态,咬合罩的长度约为105mm,此时气缸活塞杆的最大行程约为 22mm。图3g是咬合罩张开范围最大的状态,由测得相近平面夹角<45
°
相邻短枝间距,得出咬合罩张开最大半径在30mm
‑
100mm之间,从图中可知底座的半径为50mm,咬合罩张开最大范围时,与水平面的夹角约为56
°
,从而可以的咬合罩张开最大半径约为78mm。
102.改进前传动机构的驱动装置只有一个气缸,可同时控制三个咬合罩张开和闭合,并且选用的气缸,缸径和重量都较大,调节气压较困难;而优化后的末端执行器传动有3个气缸驱动,每个咬合罩都连接一个气缸,气缸既可以同步驱动,也可以单独驱动。
103.一个气缸驱动则只能控制三个咬合罩同时运动,而如果口腔不是正对着花穗去采摘,在咬合花穗的过程中,必然会有两个咬合罩夹住短枝,为了不伤害到短枝,咬合罩也无法继续进行咬合,此时第三个咬合罩还没完全罩住花穗,这种情况下运转滚刷无法将花穗从短枝上分离。而同样情况下,每个咬合罩都能单独运动,即使夹住花穗,无法继续闭合,另一个咬合罩依然可以继续运动,直至完全咬合住花穗。
104.虽然改进后需要安装三个气缸,末端执行器的整体重量会加大,但是这样末端执行器对花穗的采摘有更强的自适应能力,可以进行多角度的采摘,相较于欠驱动有更好采
摘效果。
105.2.2滚刷与气动马达结构改进
106.滚梳是实现分离花穗功能的机构,初步设计的滚刷梳刷毛较短,虽然末端执行器在正对着花穗时咬合罩能牢牢的包裹住花穗,滚刷能很好的接触花穗,滚筒毛刷才能开始梳刷花穗,但是不同短枝的花穗和叶片数量不同,花穗和叶片分布不均匀,三个滚刷能够刷到花穗和叶片,但是有些花穗叶片较多的短枝,滚刷刷毛只能接触到花穗,较内部的花穗刷不到,而当采摘花穗叶片较少的短枝时,甚至会出现滚刷空转的现象,所以滚刷的刷毛必须要有足够的长度。末端执行器从其他方向进行采摘,咬合罩闭合的范围更小,滚刷之间的夹角>30
°
,只有刷毛更长才能更好的完成花穗分离。
107.如图3h为改进后滚筒毛刷的示意图,滚刷的刷毛可以依靠被动柔顺的方式,使咬合罩和滚刷机构对被抓取的花穗和叶片有一定的自主适应能力。改进后直接在咬合罩上安装滚筒毛刷和气动马达,将手指结构优化去掉,这样咬合罩内部有更大的空间容纳毛刷,并且能够采摘花穗和叶片较多的短枝,去掉手指结构后,末端执行器口腔机械机构的重量可以得到一定的减轻,减小了末端执行器整体重量,如图 3i为滚刷安装示意图,直接将气动马达和滚刷安装在咬合罩上。
108.短枝上花穗和叶片本体长度不同,其茎部长短不同,所以为了确保能充分梳刷所有花穗,滚筒毛刷的轴选择竖直放置,这样可以已通过增长滚刷的长度,使之对花穗全方位进行滚刷,咬合罩也能防止左右刷的方式,使花穗不被刷出末端执行器,综上所述选择竖直防止,并且刷毛足够长,材质弹性适中。
109.2.3口腔内吞咽结构的设计
110.本文设计的末端执行器口腔部分在完成分离花穗的动作后,需要进行最后一个工作——吞咽。本文例是通过空气抽吸的方法将花穗从口腔通过末端执行器的“虫身”吸入收集箱,吞咽结构设计成一个漏斗装置,其结构简图如图3j所示,一方面漏斗结构更加利于空气抽吸,能提高吞咽花穗的效率;另一方面漏斗的窄端用于连接末端执行器的虫身第一节。
[0111]“口腔”与“虫身”连接结构是将漏斗的末端套进虫身的第一节,并且虫身第一节的上表面与漏斗的下表面重合,两个结构内部都开有一个键槽,通过键固定,防止转动,在通过螺栓连接固定住虫身和漏斗末端。
[0112]
本实施例设计的末端执行器口腔部分的工作原理
[0113]
本末端执行器口腔分为两种工作情况:
[0114]
(1)末端执行器口腔正对着花穗进行采摘,末端执行器的虫身将口腔送到正对于接近花穗花穗,咬合罩处于初始张开状态,如图3k所示,然后启动气缸,活塞杆开始运转,同时驱动三个咬合罩咬合,直至如图3l所示口腔完全咬合住花穗,之后启动气动马达,带动滚刷旋转,开始分离花穗,同时启动空气抽吸装置,将分离的花穗、花药吸进收集装置。
[0115]
(2)末端执行器口腔斜对着花穗进行采摘,口腔轴线与短枝的夹角在0
°
~45
°
,如图3m所示为末端执行器斜对着花穗工作原理,图3m所示咬合罩初始张开状态,其口腔轴线与短枝的夹角约为40
°
。当末端执行器咬合罩斜着去咬合花穗时,靠近树枝的两个咬合罩在闭合过程中会夹住短枝,此时这两个咬合罩不能还需闭合,第三个咬合罩继续闭合,直至如图3n所示完全咬合住花穗。然后完成分离分花穗和吞咽的工作。
[0116]
在将短枝上的花穗采摘完后,空气抽吸装置和滚刷停止运转,气缸张开咬合罩,准
备进行下一个短枝上花穗的采摘。
[0117]
3末端执行器口腔力学分析
[0118]
本发明的设计目标是提供末端执行器口腔部分的机械设计方案,其中最重要的要求就是在确保短枝不受伤害、叶片少受损伤的情况下实现花穗从嫁接雄株银杏上分离。控制末端执行器采摘银杏花穗,并且不伤害到叶片和短枝需要控制驱动装置提供的力大小。
[0119]
3.1滚刷的力学性能以及气动马达的选型
[0120]
滚筒毛刷(即刷滚)是实现将银杏花穗和短枝分离最重要的部件,为了不损害到叶片,滚筒毛刷的刷毛选择较柔软并且有一定弹性的材质。为了能充分刷到短枝上所有的花穗,提高采摘的效率,刷子的刷毛要较长,防止刷毛太短,导致滚筒毛刷空转,无法完成采摘;因为不同短枝上的花穗和叶片数量不同,刷毛较长且有一定的弹性,依靠被动柔顺的方式可以使滚筒毛刷对被抓取花穗和叶片具有形状自适应的能力。
[0121]
本实施方式选择小型气动马达作为滚刷的驱动装置,如表1为气动马达的参数表。
[0122]
表1气动马达参数表
[0123][0124]
银杏叶片采摘所需最小的力约为3n,滚刷长度l=5cm,轴径d=1cm,整个滚刷的半径r=2cm。因为刷毛较软,并且有一定的退让性,随着工作时间的推移,刷毛也会受损,设滚刷将叶片刷下来的最小力为f0=3n。
[0125]
t=f
×
r
ꢀꢀꢀꢀꢀꢀꢀꢀ
(3
‑
1)
[0126]
本实施方式的气动马达的轴半径r=5mm,带入式(3
‑
1)得,
[0127]
t=0.015n
·
m,气动马达额定扭矩为0.012n
·
m,符合要求。
[0128]
3.2末端执行器咬合罩对短枝动力学分析及气缸选型
[0129]
本末端执行器咬合罩除了在正对花穗的方向进行采摘,所以会产生咬合罩夹住短枝情况,但咬合罩不能夹断短枝,所以要进行末端执行器咬合罩对短枝的动力学分析。
[0130]
为了减小末端执行器整体的质量,选用的是小型气缸,缸径为16mm,其如表2参数所示,在压力为0.5mpa下,气缸可提供的转矩为0.16n
·
m。
[0131]
表2小型气缸参数表
[0132][0133]
如图3o所示为末端执行器口腔咬合罩与短枝接触时的受力图,此时cd为咬合罩夹住短枝,ab为气缸和活塞杆,a、c固定在咬合罩的底座上,气缸推动咬合罩闭合的同时气缸ab,所以气缸驱动提供的力f0对咬合罩de的输出转矩m。ac的距离为l1≈8.6cm,ab的长度是
l2≈4.5cm,ab的长度为 l1≈8.2cm,bc的长度为l2≈7.5cm,bd的长度为l3≈3cm,气缸ab与咬合罩的夹角为θ0。当咬合罩接触短枝时,咬合罩d点受到短枝的反作用力f。
[0134]
初步假定末端执行器零件材质为硬铝,气缸ab的质量为m1≈1.2kg,咬合罩cd的质量为 m2≈0.3kg
[0135]
因为咬合罩cd受到气缸ab的动力,所以设在咬合罩接触短枝瞬间,产生虚位移δθ,则点b处的虚位移为
[0136]
δs
b
=l2δθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3
‑
2)
[0137]
咬合罩cd的所受重力为m2g,则其作用方向上虚位移为
[0138][0139]
则气缸ab重力m1g作用下的虚位移为
[0140][0141]
d点处的作用力的虚位移为
[0142][0143]
根据虚功原理,可得方程
[0144]
mδθ+m1gδo1+m2gδo2=fδs
d
ꢀꢀꢀꢀ
(3
‑
6)
[0145]
式(3
‑
8)两边同除δs
d
可得
[0146][0147]
将式(3
‑
2),(3
‑
3),(3
‑
4),(3
‑
5)带入(3
‑
7)中,可得
[0148][0149]
将l2≈7.5cm,l3=3cm,θ0=28
°
带入式(3
‑
8)
[0150]
输出转矩m=f0l0ꢀꢀꢀꢀꢀ
(3
‑
9)
[0151]
气缸提供的压力为f0=ps=500000
×
0.004
×
0.004
×
3.14=25.12n
[0152]
将f0=25.12n,l0≈0.5cm带入(3
‑
9)得
[0153]
m=f0l0=0.1256n
·
m
[0154]
将m1,m2,m的值带入式(3
‑
8)中的出f≈15.2n,
[0155]
由短枝折断所需要的力为20n,f≈15.2n<20n,所以选用该气缸,在咬合罩夹住短枝时力低于20n,不会夹断短枝,符合设计需求。
[0156]
4末端执行器口腔机构采摘仿真试验
[0157]
4.1仿真平台的搭建
[0158]
ros是willow garage公司2010年发布的开源机器人操作系统,它采用分布式架构,通过各功能独立的节点(node)传递消息实现任务的分层次运行,具有支持多语言、免费且开源、代码易拓展等优点。ros 通常在windows系统中不适用,需要在计算机原有的windows系统中安装ubuntu虚拟机,本文使用的是 ubuntu20.04版本,在虚拟机中安装并使用ros。本实施方式主要通过ros将设计好的末端执行器口腔部分进行仿真测试。
[0159]
4.2 ros中末端执行器口腔模型的创建
[0160]
4.2.1末端执行器口腔三维模型的创建
[0161]
本文使用的是solidworks2018版本创建三维模型,为了能够将末端执行器口腔成功导入ros中,简化末端执行器口腔的结构,口腔结构的驱动装置和滚刷结构不进行装配,只进行末端执行器的咬合罩、底座和漏斗的装配。
[0162]
4.2.2 urdf模型文件
[0163]
urdf是统一描述描述机器人仿真模型设定的xml语言。在仿真时所需的是urdf文件中的数据,导入 ros moveit进行仿真。在导入ros进行模拟仿真之前需要先下载sw2.urdf的文件将其安装在solidworks 的data是文件夹中作为辅助工具,然后将建模好的模型进行重新的编辑,由于仿真软件中所有物体都需要在solidworks中进行定位和定义。
[0164]
在生成urdf文件前,需要在整个末端执行器三维模型中添加坐标系和基准轴,solidworks中的坐标系转换成urdf文件时,则生成相应的坐标点,是三维模型的关节相对于ros仿真环境中的坐标系的位置和方向;基准轴是关联三维模型没和关节旋转。本设计末端执行器口腔部分需要建一个坐标系,每个咬合罩需要建一个坐标系,每个咬合罩张开闭合的旋转关节需要一个基准轴,末端执行器口腔内部中间需要一个坐标系,整个末端执行器的口腔需要4个坐标系和3个基准轴。
[0165]
urdf模型文件包含了一系列的joint和link,joint为关节,link为连杆,如图4a所示,完整的末端执行器口腔结构由许多joint和link组成,它们包含了三维模型的各种属性。其中joint是用来连接两个物体,表示两个物体之间的相对运动形式和关节运动的位置信息等,运动类型包括旋转关节、拉伸关节、滑动关节,浮动关节等。link是描述三维模型的各个模型的形状、尺寸和颜色等信息,link连接的两个模型必须指定其中一个是父link,另一个是子link,子link的位置关系必须依赖于父link。而本文导进去的模型中,咬合罩为连杆,底座与咬合罩连接的部分为关节。
[0166]
末端执行器在仿真环境中能够模拟采摘花穗,需要将花穗模型导入,花穗模型为一个小枝条上有两个短枝,每个短枝上有4个花穗,将花穗模型转成urdf文件,将urdf文件导入ros moveit中。
[0167]
仿真测试
[0168]
将urdf文件导入ros moveit中,在文件目录中打开模型文件,并在ros终端输入指令roslaunchsc_gaebo launch,再通过rviz显示末端执行器口腔模型和花穗模型,如图4c所示为ros环境中的模型。图中的花穗模型是固定不动的,末端执行器可绕着中心轴进行360
°
旋转,可以沿着中心中平移,绕着漏斗底面中心进行180
°
的翻转。
[0169]
图4b中为末端执行器初始状态,且口腔中心轴与花穗短枝在同一直线上,此时末端执行器咬合罩与水平面的夹角为56
°
,咬合罩尖端所在平面与短枝的距离为5mm。图4c为完全包裹花穗,并且能够将花穗从短枝上分离,若咬合罩完全闭合,花穗与罩面就会发生干涉。调节初始状态咬合罩尖端所在面与短枝的间距到10mm,控制咬合罩闭合,花穗还是能被咬合罩完全包裹,也能实现花穗从短枝上分离。继续调节初始状态咬合罩尖端所在面与短枝的间距到15mm,这种情况下花穗没有被咬合罩完全包裹在口腔内,此时花穗无法全部从短枝上分离。
[0170]
所以末端执行器处于初始状态,咬合罩尖端所在面与短枝间距尽量在5mm
‑
10mm之间,否则超过 10mm会导致咬合罩不能完全包裹花穗,花穗依旧暴露在口腔外,滚刷无法完
成花穗分离的工作。
[0171]
当末端执行器中心轴与短枝夹角不为0时,需要从短枝侧面对花穗进行咬合,调节末端执行器中心轴上与短枝得夹角为30度,如图4d所示,为夹角30
°
时末端执行器初始状态,同时要调节咬合罩与树枝的距离,防止产生干涉,然后控制咬合罩闭合,如图4e所示,咬合罩能完全包裹花穗,完成分离花穗。
[0172]
本发明要求末端执行器中心轴与短枝的夹角在
±
45
°
范围内都能采摘银杏花穗,所以调节末端执行器中心轴与短枝得夹角为45
°
,此时花穗短枝在咬合罩咬合过程中被夹住,所以当两个咬合罩夹住短枝且不发生干涉的情况下,调节第三个咬合罩的角度,最后在咬合罩与短枝不发生干涉的情况下,末端执行器依然能包裹花穗,并完成分离花穗,验证出末端执行器口腔在
±
45
°
范围内都能将花穗从短枝分离。
[0173]
5、结论
[0174]
本发明通过对采摘末端执行器的研究和银杏花穗的研究,提出一个采摘银杏花穗的末端执行器口腔设计方法。通过对博比特虫口腔结构的分析和捕猎过程的观察研究,得出末端执行器口腔的咬合、分离和吞咽三个功能,提出两种结构设计思路,进行比较和完善,确定驱动装置,设计并建立末端执行器口腔结构的三维模型,能够与末端执行器的虫身、口腔模型装配,之后对口腔咬合机构对短枝进行动力学分析,以及分离花穗机构对叶片进行的受力分析。最后建立ros仿真环境,进行采摘仿真和性能测试。
[0175]
(1)末端执行器通过滚刷将花穗分离,因为滚刷刷毛的柔韧性,所以可以直接通过调节气动马达转速控制分离花穗的力,在分离花穗的同时能在很大程度上减少了对叶片的损伤。
[0176]
(2)本发明采用多驱动器控置采摘花穗,口腔的每个咬合罩都能进行单独开合,即使花穗不是正对着口腔,末端执行器也能准确咬合花穗。
[0177]
(3)本发明采用空气抽吸的方式将分离的花穗吞进“虫身”(通过管道),最后吸进收集箱。末端执行器口腔吞咽结构设计成漏斗状,更易于空气抽吸。
[0178]
(4)一般果蔬采摘的末端执行器只有两个手指或夹爪,本末端执行器口腔有三个咬合罩,因为银杏花穗尺寸和质量都非常小,并且每个短枝上有多个花穗,三个咬合罩能更好的包裹银杏花穗并且不易伤害叶片。
[0179]
本发明的采摘末端执行器是专用于采摘银杏花穗,并且是针对种植园的嫁接雄株银杏,可大面积进行采摘工作,且有一定的采摘效率。该末端执行器结构功能应用了仿生学,模仿博比特虫口腔结构和咬合动作。通过对咬合罩和滚刷的力学分析,确保在采摘花穗过程中不伤害到短枝和花穗。
[0180]
在仿真过程,验证出末端执行器延其中心轴接近花穗,当目标花穗短枝与末端执行器中心轴夹角在 +45
°
之间时,末端执行器口腔可以成功从短枝上分离花穗。当末端执行器正对花穗时,末端执行器初始状态咬合罩尖端所在平面与短枝的间距在5mm
‑
10mm范围内时,口腔都能包裹住花穗,所以也能从短枝上分离花穗。满足总末端执行器的设计需求。
[0181]
参考图2a和图2b,本例设计方法设计得到一种用于采摘银杏花穗的末端执行器口腔,包括夹爪1 和夹爪底座2;所述夹爪有相同的多个,各个夹爪围绕直线l对称;
[0182]
夹爪1的底部转动连接于夹爪底座2,转动轴线垂直于直线l;夹爪由第一驱动机构带动旋转;
[0183]
夹爪1包括咬合罩3和分离机构;咬合罩1的顶端开有缺口4,分离机构在咬合罩内侧;
[0184]
各个夹爪1转动而成的状态分为闭合状态和张开状态;闭合状态下,相邻夹爪的咬合罩的侧边贴合,各个咬合罩围成中空腔体,各个咬合罩1的缺口4围成通孔;
[0185]
所述分离机构是刷滚5,刷滚由第二驱动机构带动旋转。
[0186]
所述夹爪是3个。咬合罩是类球冠形状的一部分。
[0187]
所述夹爪底座2是圆筒形状,夹爪底座的前端开口与所述中空腔体连通,夹爪底座的后端开口连接管道11;夹爪底座的轴线与直线l重合;闭合状态下,各个夹爪的咬合罩的底边与夹爪底座的侧壁的顶部边缘贴合。
[0188]
所述第一驱动机构是气缸6;气缸的气缸座转动连接于夹爪底座的外壁,气缸的活塞杆转动连接于咬合罩的外壁。参考图1、2,在实现时候,夹爪底座2的外壁连接连杆座9;气缸6的气缸座通过圆柱销7转动连接在连杆座9上的连杆头8。同理,气缸6的活塞杆顶端的连杆头8通过圆柱销7与咬合罩 3外的连接块12转动连接。
[0189]
所述刷滚5是由塑料棒(pp棒)外连接尼龙丝构成,尼龙丝围绕塑料棒的轴线成放射状;第二驱动机构是气动马达6,气动马达6的转子连接所述塑料棒,气动马达连接于咬合罩的内壁;塑料棒的轴线与直线l共面。
[0190]
参考图2b,夹爪底座2的后端开口与管道11之间还连接有漏斗10;漏斗10的大口一端与夹爪底座的后端开口连接,漏斗10的小口一端连接管道11。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1