一种基于CW体制多普勒雷达的手势识别方法与流程
一种基于cw体制多普勒雷达的手势识别方法
技术领域
1.本发明涉及雷达技术领域,特别是涉及一种基于cw体制多普勒雷达的手势识别方法。
背景技术:
2.随着智能化产品的普及,对非接触控制的需求越来越高,其不仅可以提高产品的智能化水平,增强使用体感,还可以避免接触,在应对公共卫生突发事件中也具有很大作用。
3.有多种技术手段能够实现手势识别,如红外识别技术、图像识别技术,而通过多普勒雷达实现手势识别,具有很多优点:一是该技术不易受温度的影响,因此在识别活动目标时,能够实现更高精度的检测;二是该技术可以保护隐私,从而得它更受信赖;三是雷达可以穿透感应,可以隐藏安装,产品更加美观。
4.目前使用雷达实现手势识别基本都基于fmcw体制毫米波雷达,例如,公开号为cn109975797a的中国发明专利申请公开了一种基于多普勒雷达信号的手臂运动细节感知方法,提出一种基于多普勒雷达信号的手臂运动细节感知方法指的是对常见手势行为例如抬手、挥手、推拉等动作进行细粒度识别,具体包括手势种类判别、动作角度幅度或方向等信息分析两大内容。对于手势种类判别将从两个雷达的原始信号中组合分析,得出用户做的手势类别。其主要工作内容包括信号检测提取、识别分类、结论生成。该文提出的基于多普勒雷达信号的手臂运动细节感知方法,无需为每个角度、幅度、方向的不同动作进行大量数据的训练,因此节约了成本。使用多层次的感知方法,即先判别种类再分析细节,能提高处理效率和准确性。最终能识别出诸如手臂抬起放下的角度、手臂在身体前方挥动的幅度、推拉动作的方向等细节动作信息。
5.公开号为cn110412566 a的中国实用新型专利申请公开了一种基于多普勒雷达时频域特征的细粒度人体手臂运动识别方法,公开了一种基于多普勒雷达时频域特征的细粒度人体手臂运动识别方法,采用两个相同的微型多普勒雷达持续收集用户的手势运动信息;对采集雷达信号进行滤波处理;基于滤波后的雷达信号,采用双门限算法,对信号中有起伏波动的信号片段进行检测与提取;将经过滤波的两个雷达提取得到的动作信号进行短时傅里叶变换获得时频谱图;对时频谱图的二值化、边缘检测处理,提取出手势动作的时频谱特征;对时频谱线使用x方法分类,完成具体的手臂动作种类判断。不但识别动作种类,还分析动作细节,可提供更好更便捷的人机交互体验。
6.上述装置和方法虽然可以取得很好的效果,但是毫米波雷达价格昂贵,需要多部雷达来实现手势识别功能,设备量代价大,需要iq正交解调,设备复杂,不利于相关产品的普及。而使用成本较低的cw体制雷达实现手势识别时,存在以下缺陷:1、无法精确识别使用者手势,导致体验感下降;2、神经网络训练样本不足,导致同样的手势不同人做得到判断结果可能不同。
技术实现要素:
7.本发明针对在现有最简化cw体制多普勒雷达无法快速、精准实现手势识别的问题,提供一种基于cw体制多普勒雷达的可快速判断识别活动目标手势识别的方法。
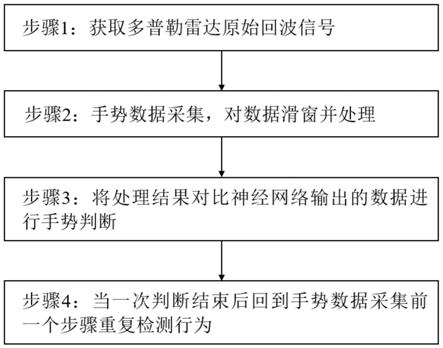
8.为此,本发明提供一种基于cw体制多普勒雷达的手势识别方法,使用单发单收单路解调cw体制多普勒雷达,其包括如下步骤:步骤1:获取多普勒雷达原始回波信号;步骤2:手势数据采集,对数据滑窗并处理;步骤3:将处理结果对比神经网络输出的数据进行手势判断;步骤4:当一次判断结束后回到手势数据采集前一个步骤重复检测行为。
9.优选的,所述步骤3中,所述神经网络输出的数据包括:(a)没有手势动作时的雷达回波信号特征;(b)上下挥手时的雷达回波信号特征,回波的信号强度逐渐增大,达到识别装置中心之后逐渐减小,信号频率大小相反,先逐渐减小后逐渐增大;(c)前后快速摆手的雷达回波信号特征,回波信号和强度基本不变,信号频率较高;(d)小臂前后画圆动作的雷达回波信号特征,其频率呈规律性变化,幅度保持不变。
10.在手势识别过程中,通过分析雷达回波频域的信息,对外界杂波信号进行滤除,防止误判。
11.本发明具有以下有益效果:
12.(1)本发明首先进行获取多普勒雷达原始回波信号,分析回波频域信息,进行手势数据采集,手势数据采集是对较短时长的数据进行处理,将处理结果对比神经网络输出数据进行手势判断,当一次判断结束后返回手势数据采集的前一步骤重复检测行为,具有灵敏度高的优势,手势控制距离能到3~4米;
13.(2)本发明对确定的干扰频点进行自适应干扰对消,降低手势识别处理受环境噪声的影响,可以对外界的杂波信号进行滤除,识别结果准确可靠,对工频干扰频点能量抑制在20db以上;
14.(3)本发明专利能够适用于超低成本单发单收cw体制雷达,接收通道只包含i路采样数据,无需利用iq正交接收,手势识别仅提取目标的速度信息。雷达结构简单、核心参数计算代价很低。本发明再时频处理,并合理选定时频处理频率范围和时间周期,减少时频图尺寸,降低深度人工神经网络处理的复杂度;
15.(4)本发明定义3种能够适应极简雷达结构,使用不含方向性的速度信息,依赖速度差异有效可分的手势种类,实现99%以上正确率的手势识别。
附图说明
16.图1是本发明检测过程的流程示意图;
17.图2a是本实用新型无动作的雷达回波信号特征图;图2b上下挥手动作的雷达回波信号特征图;图2c前后快速摆手动作的雷达回波信号特征图;图2d小臂前后画圆动作的雷达回波信号特征图;
18.图3是本发明手势识别感应装置的系统框图。
具体实施方式
19.下面结合附图和实施例对本发明做进一步说明,以使本发明所属技术领域的技术活动目标员能够更容易地实施本发明。
20.如图1所示,是本发明流程示意图,包括如下4个步骤:步骤1:获取多普勒雷达原始回波信号;步骤2:手势数据采集,对数据滑窗并处理;步骤3:将处理结果对比神经网络输出的数据进行手势判断;步骤4:当一次判断结束后回到手势数据采集前一个步骤重复检测行为。
21.先获取多普勒雷达原始回波信号,分析回波频域信息,进行手势数据采集,利用了频域进行分析,对比神经网络输出的数据进行手势判断;
22.图2a
‑
图2d无动作、上下挥手、前后快速摆手以及小臂前后画圆动作的特征图;图2a表示没有手势动作时的雷达回波信号特征,图2b表示上下挥手时的雷达回波信号特征,完整整个挥手过程,回波的信号强度逐渐增大,达到识别装置中心之后逐渐减小,信号频率大小相反,先逐渐减小后逐渐增大;图2c为前后快速摆手的雷达回波信号特征图,回波信号和强度基本不变,信号频率为三种手势中最高;图2d为小臂前后画圆动作的雷达回波信号特征图,其频率呈规律性变化,幅度保持不变。因此通过回拨信号的幅度大小和频率大小特征,可以准确区分以上三种动作。
23.图3是本发明手势识别感应装置的系统框图,其主要包括多普勒雷达1和可编程信号处理器2、电源模块3;所述多普勒雷达用于发射和接收电磁波,获取包含目标信息的雷达信号,其可以采用市售的产品,例如富奥星公司生产的x波段芯片级多普勒雷达传感器,常用型号为xbr300。可编程序信号处理器用于对雷达信号进行处理,其可以采用市售的产品,例如意法半导体有限公司生产的型号为stm32f411ceu6的mcu产品。电源模块为多普勒雷达和可编程序信号处理器供电,主要为dc
‑
dc以及ldo芯片。
24.惟以上所述者,仅为本发明的具体实施例而已,当不能以此限定本发明实施的范围,故其等同组件的置换,或依本发明专利保护范围所作的等同变化与修改,皆应仍属本发明权利要求书涵盖之范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1