人机协作载物车的制作方法
1.本发明涉及一种载物车,尤其涉及一种人机协作载物车。
背景技术:
2.近年来物流仓储航业受劳动力成本上升的影响关系,整体人力成本大幅提升,若不能调整管理、活化组织,则人力成本将成为物流业最沉重的负担,而由于物流作业需要大量的劳动力,因此如何通过物流自动化降低人力投入,是不少企业的重要诉求。
3.在现有的物流作业中,拣货人员往往需要反复的在库存区与出货区作业,因此很容易因为往复的来回造成理货效率低落,尤其当仓储货物区的规模较大时,作业人员若以走路来拣货,来回一趟起码需要花超过5分钟的时间。其中,若作业人员使用堆高机或电动拖板车等动力载具进行理货作业时,则会有油电等能源消耗的问题。
4.此外,更常见的理货作业方式是利用手推车或手拉拖板车等手动载具进行拣货作业,此方式虽然可以有效解决能源耗损问题,并增加作业人员所能拣货的量,但实务上作业人员很容易因为反复拉货而造成肌肉受伤,且由于拖板车速度较快,在厂区内运行很容易发生车祸等意外。
5.然而,不管拣货人员是使用何种方式在仓储区与出货区之间搬运货物,拣货人员在仓储区拣货时都存在有作业不便利的问题,举例来说,拣货人员利用手拉推车来装载货物时,每次移动拣货位置都要拉动手拉推车,或者将手拉推车放置于一处而来回将货物放入手拉推车中,非常的耗时费力,若拣货人员使用电动拖板车来装载货物,会站上电动拖板车来控制移动至拣货位置,然后再下车进行拣货,之后一直重复地进行上车移动与下车拣货的动作,也是非常的耗时费力。
技术实现要素:
6.有鉴于在现有技术中,现有的物流作业主要有人力作业、动力载具作业或手动载具作业,而由于人力作业的效率非常低落,因此大都会采取动力载具作业或手动载具作业的方式,但动力载具会有能源消耗的问题,而手动载具则容易造成人员受伤或发生工安意外的问题;缘此,本发明的主要目的在于提供一种人机协作载物车,可以通过与使用者配合作业来达到节能、提升作业效率与安全性的功效。
7.本发明为解决现有技术的问题,所采用的必要技术手段是提供一种人机协作载物车,用以配合一工作人员在一物品存放场所中移动,物品存放场所设有多个置物架,置物架其中相邻二者之间还形成一作业走道,作业走道标记有一辅助跟随标线,人机协作载物车包含一载物车本体、一移动组件、一地面图像获取模块、一环境图像获取模块、一图像处理模块以及一驱动控制模块。
8.载物车本体定义出一穿过载物车本体的基准平面,且基准平面划分出二方向区域。移动组件设置于载物车本体,用以驱动载物车本体沿一第一方向移动,且第一方向垂直于基准平面。
9.地面图像获取模块设置于载物车本体,用以朝地面获取一地面图像。环境图像获取模块设置于载物车本体,用以获取载物车本体的周围环境的一环境图像。
10.图像处理模块电性连结于移动组件、地面图像获取模块以及环境图像获取模块,且图像处理模块包含一地面图像处理单元、一地面图像分析单元以及一环境图像分析单元。
11.地面图像处理单元在地面图像中定义一中心基准线而产生一地面图像处理数据。地面图像分析单元电性连结于地面图像处理单元,用以解析地面图像处理数据,并在解析出一导引标线图像时,比对导引标线图像与中心基准线的一偏移角度。
12.环境图像分析单元将二方向区域中对应于第一方向的一者定义为第一方向区域,用以自环境图像中解析出一人员图像,并在人员图像位于第一方向区域时判断出一第一区域人员位置。
13.驱动控制模块电性连结于图像处理模块,并具有一跟随模式,跟随模式包含一自由跟随模式与一沿线跟随模式,驱动控制模块预设为自由跟随模式,在自由跟随模式下,驱动控制模块依据第一区域人员位置带动载物车本体跟随工作人员移动,且驱动控制模块在地面图像分析单元解析出导引标线图像时进入沿线跟随模式,在沿线跟随模式下,驱动控制模块依据偏移角度控制移动组件转向及移动而使中心基准线与导引标线图像重叠,并使第一方向平行于辅助跟随标线,进而控制移动组件依据第一区域人员位置带动载物车本体沿第一方向移动。
14.在上述必要技术手段所衍生的一附属技术手段中,人机协作载物车还包含一距离感测模块,设置于载物车本体,并电性连结于驱动控制模块,用以感测工作人员而产生一人员距离,且驱动控制模块还具有一预设跟随距离,当驱动控制模块在沿线跟随模式下检测到人员距离大于预设跟随距离时,由沿线跟随模式切换至自由跟随模式。
15.在上述必要技术手段所衍生的一附属技术手段中,驱动控制模块还具有一手动操控模式,人机协作载物车还包含一切换装置与一操控装置,切换装置电性连结于驱动控制模块,用以供工作人员在跟随模式与手动操控模式之间进行切换。操控装置电性连结于移动组件,藉以在驱动控制模块处于手动操控模式时,用以供工作人员手动控制移动组件。
16.在上述必要技术手段所衍生的一附属技术手段中,物品存放场所还具有一输送通道与一物品装卸作业区,输送通道自作业走道延伸至物品装卸作业区,且输送通道标记有一车辆导引标线,人机协作载物车还包含一切换装置,且驱动控制模块还具有一追线模式,切换装置电性连结于驱动控制模块,用以供工作人员在跟随模式与追线模式之间进行切换,当驱动控制模块在追线模式下,驱动控制模块控制移动组件沿车辆导引标线移动。
17.较佳者,驱动控制模块还包含一标线数据库,存储有多个标线种类与多个对应于标线种类的标线功能,且导引标线图像对应于标线种类中的一导引类别,导引标线图像对应于标线功能的一导引功能,驱动控制模块在地面图像分析单元自地面图像处理数据解析出一功能性标线时,依据标线功能其中对应于功能性标线者控制移动组件。
18.如上所述,由于本发明的人机协作载物车是利用地面图像获取模块来获取地面图像,并利用图像处理模块来对地面图像进行处理,进而分析出导引标线图像的偏移角度,且由于本发明还利用环境图像获取模块来获取环境图像,因此可以判断出工作人员在第一方向区域内的第一区域人员位置,藉此,当驱动控制模块处于跟随模式时,可以依据第一区域
人员位置跟随工作人员移动,并在地面图像获取模块获取到辅助跟随标线时,使人机协作载物车沿着辅助跟随标线跟着工作人员移动,藉此,可以提升工作人员拣货的便利性,进而提升拣货的效率。
19.此外,由于本发明的驱动控制模块还具有追线模式,因此工作人员在拣货完成后,可以让驱动控制模块切换为追线模式,进而使人机协作载物车自动沿着车辆导引标线移动至物品装卸作业区,进而避免作业人员在拣货区与卸货区往复移动所造成的效率低落。
20.本发明所采用的具体实施例,将通过以下的实施例及附图作进一步的说明。
附图说明
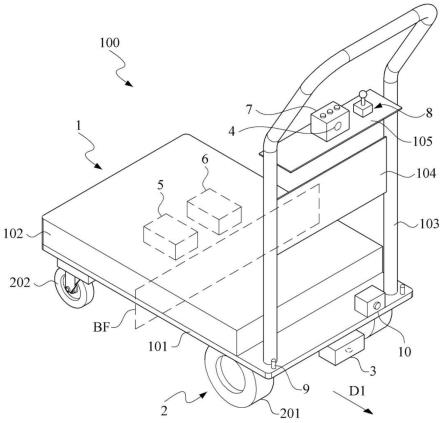
21.图1显示本发明第一较佳实施例所提供的人机协作载物车的立体示意图;
22.图2显示本发明第一较佳实施例所提供的人机协作载物车的系统方块图;
23.图3显示本发明第一较佳实施例所提供的驱动控制模块的系统方块图;
24.图4显示本发明第一较佳实施例所提供的人机协作载物车所应用之物品存放场所的平面示意图;
25.图5显示本发明第一较佳实施例所提供的人机协作载物车跟随工作人员移动至作业走道的平面示意图;
26.图6显示在本发明第一较佳实施例中,地面图像处理单元在地面图像中定义中心基准线的平面示意图;
27.图7显示本发明第一较佳实施例所提供的人机协作载物车沿着辅助跟随标线跟随工作人员移动的平面示意图;
28.图8显示本发明第一较佳实施例所提供的人机协作载物车跟随工作人员移动至作业走道的平面示意图;
29.图9显示本发明第一较佳实施例所提供的人机协作载物车所应用的另一物品存放场所的平面示意图;以及
30.图10显示本发明第二较佳实施例所提供的人机协作载物车拖拉另一载物车的立体示意图。
31.附图标号说明:
32.100,100a:人机协作载物车
33.1,1a:载物车本体
34.101:载物车基座
35.102:载物车平台
36.103:手拉杆
37.104:挡板
38.105:载板
39.2:移动组件
40.201:驱动轮
41.202:辅助轮
42.3:地面图像获取模块
43.4:环境图像获取模块
44.5:图像处理模块
45.501:地面图像处理单元
46.502:地面图像分析单元
47.503:环境图像分析单元
48.6:驱动控制模块
49.601:人员位置处理单元
50.602:标线数据库
51.603:标线图像处理单元
52.604:驱动控制单元
53.605:距离保持控制单元
54.606:跟随模式切换单元
55.7:切换装置
56.8:操控装置
57.9:距离感测模块
58.10:紧急停止装置
59.101a:拖拉组件
60.200,200a:物品存放场所
61.2001,2001a:置物架
62.2002,2002a:作业走道
63.2003,2003a:输送通道
64.2004,2005a:辅助跟随标线
65.2004a:外围通道
66.2005,2006a,2007a:车辆导引标线
67.2006:功能性标线
68.2007,2008a:物品装卸作业区
69.2008:功能性标线
70.300:工作人员
71.400:载具
72.bf:基准平面
73.d1:第一方向
74.dr1,dr2:方向区域
75.cl:中心基准线
76.cp:中心基准点
77.da:偏移角度
78.dd:偏移距离
79.fi:地面图像处理数据
80.2004x:导引标线图像
具体实施方式
81.请参阅图1至图6,图1显示本发明第一较佳实施例所提供的人机协作载物车的立体示意图;图2显示本发明第一较佳实施例所提供的人机协作载物车的系统方块图;图3显示本发明第一较佳实施例所提供的驱动控制模块的系统方块图;图4显示本发明第一较佳实施例所提供的人机协作载物车所应用的物品存放场所的平面示意图;图5显示本发明第一较佳实施例所提供的人机协作载物车跟随工作人员移动至作业走道的平面示意图;图6显示在本发明第一较佳实施例中,地面图像处理单元在地面图像中定义中心基准线的平面示意图。
82.如图1至图6所示,一种人机协作载物车100包含一载物车本体1、一移动组件2、一地面图像获取模块3、一环境图像获取模块4、一图像处理模块5、一驱动控制模块6、一切换装置7、一操控装置8、一距离感测模块9以及一紧急停止装置10。
83.承上所述,本实施例的人机协作载物车100是应用于一物品存放场所200,用以配合一工作人员300在物品存放场所200中移动,且物品存放场所200设有多个置物架2001(图中仅标示一个),多个置物架2001其中相邻二者之间更形成一作业走道2002,进而使物品存放场所200具有多个作业走道2002(图中仅标示一个),且物品存放场所200更具有二分别连通多个作业走道2002的输送通道2003(图中仅标示一个),输送通道2003是分别自作业走道2002延伸至一物品装卸作业区2007。
84.其中,作业走道2002分别标记有一辅助跟随标线2004,而二输送通道2003分别标记有一车辆导引标线2005,且车辆导引标线2005的两端更分别标记有一功能性标线2006(图中仅标示一个),且二车辆导引标线2005分别延伸至一物品装卸作业区2007;此外,车辆导引标线2005的弯折处更设有一功能性标线2008。
85.载物车本体1包含一载物车基座101、一载物车平台102、一手拉杆103、一挡板104以及一载板105,且载物车本体1更定义出一穿过载物车本体1的基准平面bf,且基准平面bf划分出二方向区域dr1与dr2。载物车基座101在本实施例中为一板体,而载物车平台102是固定于载物车基座101的上方,用以承载物品。手拉杆103是固定于载物车基座101,用以提供手动拖拉的用途。挡板104是固设于手拉杆103的两侧间,用以阻挡放置于载物车平台102的物品往前滑落。载板105是固定于手拉杆103的两侧间,并位于挡板104的上方,用以设置其他装置。
86.移动组件2包含二驱动轮201(图中仅标示一个)与二辅助轮202(图中仅标示一个)。二驱动轮201是设置于载物车基座101的底部,并位于基准平面bf的一侧,且实务上是受马达所驱动,进而驱动载物车本体1沿一垂直于基准平面bf的第一方向d1移动前进,并可驱动载物车本体1沿第一方向d1的反向移动后退,且还可以转动来改变第一方向d1。
87.二辅助轮202同样是设置于载物车基座101的底部,并位于基准平面bf相对于二驱动轮201的另一侧,用以与二驱动轮201配合而支撑并带动载物车基座101移动;其中,由于二辅助轮202未设有马达,因此是随着二驱动轮201的带动而被动的滚动。
88.地面图像获取模块3是设置于载物车基座101的底部,用以朝地面获取一地面图像;在本实施例中,地面图像获取模块3是获取物品存放场所200内的地面图像。
89.环境图像获取模块4设置于载板105的中心,用以获取载物车本体1的周围环境的一环境图像。其中,地面图像获取模块3与环境图像获取模块4在本实施例中皆为一电荷耦
合器件(charge-coupled device,ccd)。
90.在本实施例中,环境图像获取模块4是沿第一方向d1获取载物车本体1的前方环境图像,但在其他实施例中则不限于此,亦可利用多个环境图像获取模块4来获取载物车本体1的前方环境图像、侧边环境图像与后方环境图像,或者可利用一个可旋转的环境图像获取模块4通过转动的方式获取载物车本体1的前方环境图像、侧边环境图像与后方环境图像。
91.此外,虽然在本实施例中,基准平面bf是穿过载物车基座101的中心,但实务上亦可以将基准平面bf定义为穿过环境图像获取模块4。
92.图像处理模块5包含一地面图像处理单元501、一地面图像分析单元502以及一环境图像分析单元503。地面图像处理单元501是电性连结于地面图像获取模块3,并在地面图像中定义一中心基准线cl而产生一地面图像处理数据fi。
93.地面图像分析单元502是电性连结于地面图像处理单元501,用以解析地面图像处理数据fi,并在解析出一导引标线图像2004x时,比对导引标线图像2004x与中心基准线cl的一偏移角度da;此外,地面图像分析单元502更比对出导引标线图像2004x与中心基准线cl的中心基准点cp之间的偏移距离dd。
94.环境图像分析单元503是将二方向区域dr1与dr2中对应于第一方向d1的一者定义为第一方向区域(在本实施例中是将方向区域dr1定义为第一方向区域),用以自环境图像中解析出一人员图像,并在人员图像位于第一方向区域时判断出一第一区域人员位置。其中,由于在本实施例中,环境图像获取模块4是设置于第一方向区域内,并朝第一方向d1获取载物车本体1的前方环境图像,因此当环境图像分析单元503自环境图像中解析出人员图像时,即表示人员图像位于第一方向区域内,且环境图像分析单元503同样能在环境图像获取模块4所获取的环境图像中定义一环境图像中心基准线(图未示,相似于地面图像处理单元501于地面图像中定义的中心基准线cl),并比较人员图像、环境图像中心基准线与环境图像获取模块4的设置位置来判断出一第一区域人员位置。
95.驱动控制模块6包含一人员位置处理单元601、一标线数据库602、一标线图像处理单元603、一驱动控制单元604、一距离保持控制单元605以及一跟随模式切换单元606。
96.人员位置处理单元601电性连结于环境图像分析单元503,用以依据环境图像分析单元503所判断的第一区域人员位置来计算出一转动角度与一移动距离。
97.标线数据库602依据多个标线种类存储有多个标线特征与多个标线功能,所述多个标线种类包含一对应于车辆导引标线2005的导引标线类别、一对应于辅助跟随标线2004的辅助标线类别、一对应于功能性标线2006的停止标线类别以及一对应于功能性标线2008的减速标线类别。
98.其中,标线特征与标线功能都可由使用者自行设定。在本实施例中,导引标线类别所对应的标线特征是指标线为黄色,且导引标线类别所对应的标线功能为引导载物车本体1的移动方向;辅助标线类别所对应的标线特征是指标线为红色,且辅助标线类别所对应的标线功能为引导载物车本体1的移动方向;停止标线类别所对应标线特征是指标线为红色直线与黄色直线的组合,且停止标线类别所对应的标线功能是让载物车本体1停止移动;减速标线类别所对应的标线特征是指标线为红色曲线与黄色曲线之组合,且减速标线类别所对应的标线功能是让载物车本体1的移动速度降低。
99.标线图像处理单元603电性连结于地面图像分析单元502以及标线数据库602,用
以依据地面图像分析单元502所解析出的导引标线图像2004x与标线数据库602的标线特征进行比对,以判断导引标线图像2004x所对应的标线种类与相对应的标线功能,且当导引标线图像2004x所对应的标线种类为导引标线类别时,更依据地面图像分析单元502所比对出的偏移角度da与偏移距离dd产生一修正方向与一修正距离。
100.驱动控制单元604电性连结于人员位置处理单元601、标线数据库602、标线图像处理单元603以及移动组件2,并具有一跟随模式、一手动操控模式以及一追线模式。其中,跟随模式还包含一自由跟随模式与一沿线跟随模式,当驱动控制单元604处于跟随模式下时,是预设为自由跟随模式。
101.在自由跟随模式下,驱动控制单元604是依据第一区域人员位置控制移动组件2带动载物车本体1跟随工作人员300移动,且驱动控制单元604是在地面图像分析单元502解析出导引标线图像2004x时进入沿线跟随模式。
102.在沿线跟随模式下,驱动控制单元604是依据偏移角度控制移动组件2转向及移动而使中心基准线cl与导引标线图像2004x重叠,并使第一方向d1平行于辅助跟随标线2004,进而控制移动组件2依据第一区域人员位置带动载物车本体1沿第一方向d1移动。
103.距离保持控制单元605电性连结于距离感测模块9、人员位置处理单元601以及驱动控制单元604,用以接收距离感测模块9感测工作人员300所产生的一人员距离,并比对人员位置处理单元601所计算出的转动角度与移动距离来控制驱动控制单元604的移动速度与转动角度。
104.跟随模式切换单元606是电性连结于距离感测模块9、驱动控制单元604以及距离保持控制单元605,并内建有一预设跟随距离,当跟随模式切换单元606接收到距离感测模块9感测工作人员300所产生的人员距离大于预设跟随距离时,跟随模式切换单元606会控制驱动控制单元604由自由跟随模式切换为沿线跟随模式。
105.切换装置7是设置于载板105,且在本实施例中,环境图像获取模块4是与切换装置7整合为一体,而切换装置7更电性连结于驱动控制单元604,用以供工作人员300在跟随模式、手动操控模式与追线模式之间进行切换。
106.操控装置8是电性连结于驱动控制单元604,当在驱动控制单元604处于手动操控模式时,驱动控制单元604是依据操控装置8所传送的操控信号直接控制移动组件2的移动。
107.请一并参阅图1至图8,图7显示本发明第一较佳实施例所提供的人机协作载物车沿着辅助跟随标线跟随工作人员移动的平面示意图;图8显示本发明第一较佳实施例所提供的人机协作载物车跟随工作人员移动至作业走道的平面示意图。
108.如图1至图8所示,在实务运用上,在驱动控制单元604处于自由跟随模式下,当人机协作载物车100如图5所示的跟随着工作人员300移动而进入作业走道2002时,由于人机协作载物车100的地面图像获取模块3会获取到包含辅助跟随标线2004的地面图像,因此地面图像分析单元502会解析出导引标线图像2004x,使得驱动控制单元604进入沿线跟随模式,使得人机协作载物车100如图7所示的沿着辅助跟随标线2004跟随着工作人员300移动。
109.承上所述,在驱动控制单元604处于沿线跟随模式下,当距离感测模块9所感测到的人员距离小于预设跟随距离时,因为驱动控制单元604是控制移动组件2沿着辅助跟随标线2004跟随着工作人员300移动,因此即使工作人员300位于人机协作载物车100的侧边也能进行跟随,进而产生侧边跟随的结果,有利于工作人员300将置物架2001上的物品取下并
放入人机协作载物车100中。
110.接着,当工作人员300停止取物作业而欲使人机协作载物车100将物品载往物品装卸作业区2007时,工作人员300可以先移动至车辆导引标线2005处。在工作人员300由辅助跟随标线2004处移动至车辆导引标线2005处时,虽然驱动控制单元604会因为处于沿线跟随模式而在工作人员300远离辅助跟随标线2004时先停留在辅助跟随标线2004上,然而当距离感测模块9所感测到的人员距离大于预设跟随距离时,会使驱动控制单元604切换至自由跟随模式,进而离开辅助跟随标线2004而自由跟随工作人员300移动至车辆导引标线2005处。
111.当人机协作载物车100跟随工作人员300移动至车辆导引标线2005处时,工作人员300可以通过切换装置7将驱动控制单元604由跟随模式切换至追线模式,此时驱动控制单元604会通过地面图像获取模块3获取地面图像,并通过图像处理模块5解析出导引标线图像2004x,使得标线图像处理单元603判断导引标线图像2004x的导引标线类别与相对应的标线功能,进而控制移动组件2如图8所示的自动沿着车辆导引标线2005移动。
112.承上所述,当人机协作载物车100移动至功能性标线2008时,地面图像分析单元502会从地面图像获取模块3所获取的地面图像中分析出对应于功能性标线2008的导引标线图像(图未示),且标线图像处理单元603也会从标线数据库602中比对到功能性标线2008所对应的标线功能是让载物车本体1的移动速度降低,因此驱动控制单元604会控制移动组件2降低速度以通过弯道。此外,当人机协作载物车100移动至功能性标线2006时,驱动控制单元604也会依据功能性标线2006所对应的标线功能而移动组件2停止。
113.请继续参阅图9,图9显示本发明第一较佳实施例所提供的人机协作载物车所应用的另一物品存放场所的平面示意图。如图1至图9所示,本实施例的人机协作载物车100除了可以应用于上述的物品存放场所200外,亦可应用于另一物品存放场所200a,而物品存放场所200a与物品存放场所200的差异主要在于,物品存放场所200a的多个置物架2001a之间的作业走道2002a的宽度较大,因此每个作业走道2002在靠近置物架2001a的两侧分别设有一辅助跟随标线2005a。
114.此外,物品存放场所200a还具有三个分别连通多个作业走道2002a的输送通道2003a(图中仅标示一个)与一连通于三个输送通道2003a的外围通道2004a,而三个输送通道2003a位于中间者标记有一车辆导引标线2006a,而三个输送通道2003a其位于两侧者与外围通道2004a则标记有另一车辆导引标线2007a;其中,车辆导引标线2006a与车辆导引标线2007a分别连通于一物品装卸作业区2008a,藉此,工作人员(图未示)可以利用车辆导引标线2006a将卸货完的人机协作载物车100由物品装卸作业区2008a移动至三个输送通道2003a其中位于中间者,而当作业人员欲将装满物品之人机协作载物车100移动至物品装卸作业区2008a时,便可经由车辆导引标线2007a进行引导,意即将车辆导引标线2006a作为空的人机协作载物车100的释出路线,而车辆导引标线2007a则作为满载的人机协作载物车100的出货路线。
115.图10显示本发明第二较佳实施例所提供的人机协作载物车拖拉另一载物车的立体示意图。如图10所示,本发明的第二较佳实施例更提供一种人机协作载物车100a,而人机协作载物车100a与上述第一较佳实施例的人机协作载物车100相似,其差异主要在于人机协作载物车100a的一载物车本体1a更具有一拖拉组件101a,使人机协作载物车100a可以通
过拖拉组件101a连结一载具(例如笼车等物流台车)400,进而拖动载具400移动。
116.综上所述,由于本发明的人机协作载物车是利用地面图像获取模块来获取地面图像,并利用图像处理模块来对地面图像进行处理,进而分析出导引标线图像的偏移角度,且由于本发明还利用环境图像获取模块来获取环境图像,因此可以判断出工作人员在第一方向区域内的第一区域人员位置,藉此,当驱动控制模块处于跟随模式时,可以依据第一区域人员位置跟随工作人员移动,并在地面图像获取模块获取到辅助跟随标线时,使人机协作载物车沿着辅助跟随标线跟着工作人员移动,藉此,可以提升工作人员拣货的便利性,进而提升拣货的效率。
117.此外,由于本发明的驱动控制模块更具有追线模式,因此工作人员在拣货完成后,可以让驱动控制模块切换为追线模式,进而使人机协作载物车自动沿着车辆导引标线移动至物品装卸作业区,进而避免作业人员在拣货区与卸货区往复移动所造成的效率低落。
118.通过以上较佳具体实施例的详述,希望能更加清楚描述本发明的特征与精神,而并非以上述所揭示的较佳具体实施例来对本发明的范畴加以限制。相反地,其目的是希望能涵盖各种改变及具相等性的安排于本发明所欲申请的权利要求范围的范畴内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1