针对两相体积份额图像的边界重构锐化方法
1.本发明涉及的是一种图像处理领域的技术,具体是一种针对两相体积份额图像的边界重构锐化方法。针对丝网等传感器测得的分辨率较低的两相体积份额图像,对其相边界进行重构锐化的方法。
背景技术:
2.两相流动包括固
‑
液、汽
‑
液、固
‑
汽之间物质流动,其可视化监测测量具有十分重要的意义,现有技术利用丝网测量传感器或电导探针等设备获取两相体积份额分布图像。但受限于传感器的性能,获取的两相体积份额分布图像分辨率较低,相边界呈现阶梯状,不能准确反映相分布状态。
3.对两相体积份额分布图像的相关处理算法的描写多集中于公开文献中,如micro wire
‑
mesh sensor for two
‑
phase flow measurement in a rectangular narrow channel,其针对所开发传感器获得的两相体积空泡份额图像,直接对其中离散相的速度面积及位置进行分析,没有对相边界重构锐化算法进行研究。另如electrical capacitance volume tomography:design and applications,其对电层析传感器信号进行处理获得两相体积空泡份额图像,但并未对图像中的相边界进行进一步处理。
4.现有的图像改进技术仅能提升边界清晰度,对低分辨率图像边界难以使边界变得光滑;算法采用的阈值不具备自适应性,需人为设定且阈值的不同处理效果不同。
技术实现要素:
5.本发明针对现有技术存在的上述不足,提出一种针对两相体积份额图像的边界重构锐化方法,根据图像自动生成不同对象的不同阈值,能对图像进行精细化处理的同时实现两相体积份额图像相边界的重构锐化。
6.本发明是通过以下技术方案实现的:
7.本发明涉及一种针对两相体积份额图像的边界重构锐化方法,通过对原始体积份额分布图像进行插值后的图像进行离散相标记,计算各离散相的蒙版图像及其离散相质心或形心,再对各个蒙版图像进行锐化后叠加,得到重构锐化后的体积份额分布图像。
8.所述的两相体积份额图像是指离散相与连续相图像,通常图像中连续相所在位置处的像素点值为0,离散相所在位置处的像素点值为其体积份额,大小范围为0到1。
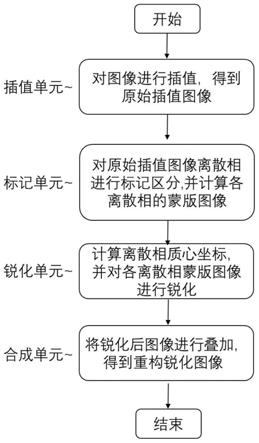
9.本发明涉及一种实现上述方法的系统,包括:插值单元、标记单元、锐化计算单元以及合成单元,其中:插值单元与标记单元相连并传输插值后的体积份额分布图像信息,标记单元与锐化计算单元相连并对图像中的离散相进行标记并传输各离散相的蒙版信息,锐化计算单元与合成单元相连并传输各离散相锐化后图像信息,合成单元将接收的各离散相锐化后图像进行合成,重构出锐化后的体积份额分布图像。技术效果
10.本发明整体解决了现有图像改进技术在处理两相体积份额图像时需人为选择阈
值,无法获得光滑边界的不足;本发明通过锐化计算,对不同离散相采取不同阈值、锐化阈值根据体积份额方向导计算以及阈值无需人为设定,能使原始图像相边界变的光滑清晰,且与实际形状相符;算法具有图像自适应性,能够自动对图像进行处理,无需人为选定阈值;算法能对图像中的不同对象选定不同阈值,对图像进行精细化处理,提高处理结果准确性。
附图说明
11.图1为本发明方法流程图;
12.图2为实施例标记算法示意图;
13.图3为重构锐化算法效果示意图;
14.图中:(a)原始体积份额分布图像;(b)重构锐化后的体积份额分布图像
15.图4为实施例得到的相边界与高速相机对比示意图。
具体实施方式
16.如图1所示,为本实施例涉及一种针对两相体积份额图像的边界重构锐化方法,通过对原始体积份额分布图像进行插值后的图像进行离散相标记,计算各离散相的蒙版图像及其离散相质心或形心,再对各个蒙版图像进行锐化后叠加,得到重构锐化后的体积份额分布图像。
17.本实施例中两相体积份额分布图像为β
i
,其中:i=1,...,n是图像像素点的位置索引,n为图像总像素点数。
18.所述的插值,用于将低分辨率的原始体积份额分布图像β
i
插值拓展为高分辨率图像β
′
k
,其中:i=1,...,n是图像像素点的位置索引,n为图像总像素点数,k=1,...,nφ2,φ为插值放大倍数。
19.本实施例采用但不限于双立方插值、lanzos插值等插值算法。
20.所述的离散相标记,用于区分插值后图像内的不同离散相,以便对各离散相的相边界进行精细化处理;如图2所示,具体包括:建立一个与高分辨率图像β
′
k
大小相同的标记矩阵γ
k
,通过对γ
k
循环赋值完成对β
′
k
中所有离散相的标记,使得不同的离散相在γ
k
对应位置处的值不同。
21.所述的循环赋值包括以下步骤:
22.①
搜索β
′
k
中对应标记矩阵值为0的离散相像素点并生成索引集合k
m
={k|β
′
k
>0∩γ
k
=0},当k
m
不是空集,则将k
m
对应的像素点中体积份额值最大的像素点作为第一代种子点,当同时存在多个体积份额值为最大值的像素点时,则其中位置索引k最小的像素点、选择位置索引k最大的点或其中任意一点均可作为第一代种子点,其中:m为循环次数,初代种子点索引集合s
0,m
=min{k|β
′
k
=max(β
′
k
′
,k
′
∈k
m
)}。
23.所述的第一代种子点,优选当同时存在多个体积份额值为最大值的像素点时取其中位置索引k最小的像素点。
24.②
对标记矩阵γ
k
中对应第一代种子点位置的值赋值为m,即γ[k]=m,k∈s
1,m
;然后以种子点为中心,搜索其邻域中属于离散相且未被标记的点,并将这些点的索引集合作为下一代种子点集合,直至第m次循环中的第g代种子点索引集合为s
g,m
={k|k∈k
neighbor
(s
g
‑
1,m
)∩β
′
k
>0∩γ
k
=0},其中:k
neighbor
(s
g
‑
1,m
)是第g
‑
1代种子点的邻域点的合集,当s
g,m
不为空集时对标记矩阵γ
k
中对应第g代种子点位置的值赋值为m,即γ[k]=m,k∈s
g,m
,否则结束本次循环。
[0025]
所述的标记矩阵γ
k
初始值为0。
[0026]
所述的各离散相的蒙版图像是指:对于标号为m的离散相,其蒙版图像所述的各离散相的蒙版图像是指:对于标号为m的离散相,其蒙版图像
[0027]
所述的离散相质心或形心,优选为离散相质心其中:为离散相质心坐标,为蒙版图像位置索引为k的像素点坐标。
[0028]
所述的锐化是指:以方向导数取最大为原则得到体积份额的平均值作为锐化阈值进行锐化,具体为:以第m个离散相的蒙版图像的离散相质心为原点选取n个方向计算体积份额的一阶方向导数,对于第j个方向的方向导数,记其取得最大值的位置处所对应体积份额为β
′
c,m,j
;以不同方向计算得到的体积份额的平均值作为第m个离散相的锐化阈值β
′
c,m
,即即得到第m个蒙版图像锐化后的图像
[0029]
所述的叠加,即将所有锐化后的图像求和得到体积份额分布图像m
″
m,k
=∑
m
m
′
m,k
。
[0030]
本实施例以对汽液两相体积份额分布图像进行处理的实际过程为例,如图3a所示,原始两相体积份额分布图像受传感器限制,自身分辨率极低,相边界模糊且呈阶梯状,相边界分布与实际情况差异较大。通过采用本方法对每个离散相按90
°
角度间隔选取四个方向计算方向导数,重构锐化后的体积份额分布图像如图3b所示,可以发现处理后的相边界变得清晰光滑,能够更加直观的反映相边界分布实际情况。如图4所示,不同时刻下,使用本方法处理后的相界面分布与高速相机拍摄所得的实际相界面分布对比,可以发现重构锐化后的边界与实际相边界吻合良好,处理后边界能够准确的反映相边界的实际分布。
[0031]
与现有技术相比,本方法针对低分辨率两相体积份额图像,本方法能对图像内不同离散相全自动地计算其锐化阈值,获得高分辨率且相边界清晰真实的图像。
[0032]
上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1