一种车载摄像头脏污动态检测方法与流程
1.本发明涉及一种车载摄像头脏污检测方法,特别是一种车载摄像头脏污动态检测方法。
背景技术:
2.车载摄像头在各种环境中工作,不可避免的,会存在脏污的情况,在这种情况下,依赖于摄像头视频数据的各种功能都会出现问题,给用户造成极差的体验。
3.如果能够动态识别到脏污的情况,就可以通过某种方式告知用户摄像头出现脏污情况,需要清理或者替换摄像头。然而目前并没有很好的算法动态识别摄像头脏污情况。
技术实现要素:
4.本发明的目的是在于解决现有车辆行驶过程中,通过采集摄像头的实时视频,检测摄像头是否存在脏污情况,而提供一种车载摄像头脏污动态检测方法。
5.一种车载摄像头脏污动态检测方法,所述的检测方法的步骤如下:
6.1.1、初始化:所述初始化过程包括环境的初始化和感兴趣区域初始化;
7.1.2、采集数据:从摄像头获取一帧数据,如果与上次处理时间间隔小于1秒,则丢弃并继续获取,否则进入下一步;
8.1.3、运动判断:当车速小于15km/h时,认为判断车辆处于非运动状态,跳到步骤1.2,否则进入下一步;
9.1.4、首帧判断与处理:如果是第一帧,保存此帧数据,把累计最亮图像和累计最大差图像设置为黑色,并跳到步骤1.2,否则进入下一步;
10.1.5、求累计最大差图像:所述累计最大差图像,即点像素值为相近两幅图像此点值之差的绝对值的最大者;计算方法是,逐个像素计算当前图像与上帧图像之差的绝对值,与当前累计最大差图对比,取较大的数值存入累计最大差图;
11.1.6、求累计最亮图像:所述累计最大差图像,即点像素值为多幅图像此点值的最大者;
12.1.7、累计到x帧判断与处理:
13.x为累计帧数量参数,默认为10;
14.判断是否累计到x帧,如果没有,则保存此帧数据,跳到步骤b,否则进入下一步;
15.1.8、累计最亮图二值化:采用自适应二值化方法对累计最亮图进行二值化,二值化后再膨胀腐蚀清除掉多余黑块;
16.1.9、脏污检测并上报:
17.y为脏污块图像像素面积参数,默认400;
18.对二值化图进行轮廓提取,并根据提取的轮廓计算区域面积,如果面积大于y,这认为摄像头脏污,上报脏污状态,如果不存在面积大于y的黑块,则未发现摄像头脏污;
19.1.10、结束判断与处理:根据外部输入,判断是否需要结束功能,如果需要结束,则
退出,否则保存此帧数据,把累计最亮图像和累计最大差图像设置为黑色,设置累计计数为0,并跳到第1.2步继续执行脏污检测。
20.进一步的,所述检测方法的步骤还包括:优化累计最亮图像:所述优化累计最亮图像的步骤如下:
21.2.1、求累计最亮图的模糊图,取点周围n*n个点的均值作为点的模糊值,n默认值101;
22.2.2、优化累计最亮图:
23.用公式c=a+(b
‑
a)*p优化累计最亮图,其中a为点的累计最亮图值,b为点模糊值,p通过最大差图计算得到,计算公式p=(v
‑
p1)/p2,p=min(1,max(0,p)),v为点的累计最大差图值,p1、p2为参数,默认值0.07、0.22;优化后的累计最亮图中,脏污部分会明显比别的地方暗。
24.采用上述技术方案的有益效果是:可以实时动态检测摄像头脏污情况。
附图说明
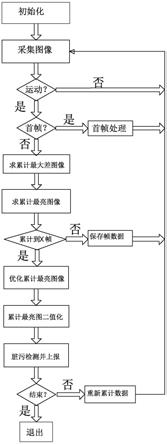
25.图1为本方案中检测方法的步骤图
具体实施方式
26.以下结合附图和本发明优选的具体实施例对本发明的内容作进一步地说明。所举实例只用于解释本发明,并非用于限定本发明的范围。
27.如图1中所述,本方案中所述检测方法的步骤如下:
28.一,初始化
29.初始化过程包括环境的初始化、感兴趣区域初始化等;
30.二,采集数据
31.后面的计算需要两帧图像间有一定的时间间隔,因此不需要每帧都处理;
32.从摄像头获取一帧数据,如果与上次处理时间间隔小于1秒,则丢弃并继续获取,否则进入下一步;
33.三,运动判断
34.当车速小于15km/h时,认为判断车辆处于非运动状态,跳到步骤二,否则进入下一步;
35.四、首帧判断与处理
36.如果是第一帧,保存此帧数据,把累计最亮图像和累计最大差图像设置为黑色,并跳到步骤二,否则进入下一步;
37.五,求累计最大差图像
38.累计最大差图像,即点像素值为相近两幅图像此点值之差的绝对值的最大者;计算方法是,逐个像素计算当前图像与上帧图像之差的绝对值,与当前累计最大差图对比,取较大的数值存入累计最大差图;六,求累计最亮图像
39.累计最大差图像,即点像素值为多幅图像此点值的最大者;
40.为了减少车道线等白色物体的干扰,先把当前图像的白色部分点替换为感兴趣区域图像的平均值,然后逐个像素比较当前图像和当前累计最亮图像,取较大的数值存入累
计最亮图;
41.七、累计到x帧判断与处理
42.x为累计帧数量参数,默认为10;
43.判断是否累计到x帧,如果没有,则保存此帧数据,跳到步骤二,否则进入下一步;
44.八,优化累计最亮图像
45.因前述步骤中所得到的累计最亮图有很多噪点,需要进一步的优化,所述优化累计最亮图像步骤如下:
46.8.1、求累计最亮图的模糊图,取点周围n*n个点的均值作为点的模糊值,n默认值101;
47.8.2、优化累计最亮图:
48.用公式c=a+(b
‑
a)*p优化累计最亮图,其中a为点的累计最亮图值,b为点模糊值,p通过最大差图计算得到,计算公式p=(v
‑
p1)/p2,p=min(1,max(0,p)),v为点的累计最大差图值,p1、p2为参数,默认值0.07、0.22。优化后的累计最亮图中,脏污部分会明显比别的地方暗;
49.九,累计最亮图二值化
50.采用自适应二值化方法对累计最亮图进行二值化,二值化后再膨胀腐蚀清除掉多余黑块;
51.十,脏污检测并上报
52.y为脏污块图像像素面积参数,默认400;
53.对二值化图进行轮廓提取,并根据提取的轮廓计算区域面积,如果面积大于y,这认为摄像头脏污,上报脏污状态,如果不存在面积大于y的黑块,则未发现摄像头脏污;
54.十一,结束判断与处理
55.根据外部输入,判断是否需要结束功能,如果需要结束,则退出,否则保存此帧数据,把累计最亮图像和累计最大差图像设置为黑色,设置累计计数为0,并跳到第二步继续执行脏污检测。
56.具体操作中,当摄像头脏污时,摄像头在脏污位置的图像存比正常图像暗,当车辆运动时,就可以通过较长时间存在的较暗区域来判断摄像头是否存在脏污。
57.实际安装中,摄像头可能会照到车身,这部分也会有较长时间较暗这个特性,因此,为了过滤这部分的影响,需要先设定感兴趣区域,把不感兴趣的车身等部分剔除掉。
58.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1