防误触的方法及传感器控制器与流程
1.本发明涉及防误触的方法及传感器控制器。
背景技术:
2.已知有实现利用主动笔的笔输入的位置检测器。主动笔是构成为从设置于笔尖的笔尖电极发送下行链路信号的电子笔。位置检测器构成为,在配置于触摸面内的多个传感器电极的各自处尝试下行链路信号的检测,基于其结果来检测主动笔的指示位置。
3.然而,下行链路信号会通过主动笔的壳体而也向保持着主动笔的用户的人体传递。这样一来,不仅是笔尖电极,也会从用户的手掌(palm)发送下行链路信号,因此,若用户将手抵着触摸面,则从手掌发送出的下行链路信号也会被传感器电极检测。基于该检测的结果而检测的位置不能说正确地反映了主动笔的指示位置,因此需要从主动笔的指示位置排除。以下,将从主动笔的指示位置排除手掌的接触位置称作“防误触”。
4.在专利文献1中公开了用于实现防误触的技术的一例。在该技术中,通过将利用手指的触摸的检测结果与下行链路信号的接收结果组合来判定检测到下行链路信号的位置是手掌的接触位置还是主动笔的指示位置,基于其结果而从主动笔的指示位置排除手掌的接触位置。
5.现有技术文献
6.专利文献
7.专利文献1:国际公开第2018/225204号说明书
技术实现要素:
8.发明所要解决的课题
9.然而,在专利文献1所记载的防误触中,需要触摸检测的结果。因此,在停止触摸检测且仅进行主动笔的检测的模式(仅笔模式)下无法执行。
10.另外,为了在专利文献1所记载的防误触中正确地判定手掌的接触位置,需要在触摸检测中因手掌的接触而检测的区域的面积宽到能够与因通常的手指的接触而检测的区域进行区分的程度。因此,在利用手掌的触摸止步于轻的触摸而只在无法与通常的利用手指的接触进行区分的程度的区域中被检测出的情况下,无法正确地进行判定。
11.因此,本发明的目的之一在于,提供能够不依赖于触摸检测等基于与主动笔的检测不同的过程的检测的结果而从主动笔的指示位置排除手掌的接触位置的防误触的方法及传感器控制器。
12.用于解决课题的手段
13.本发明的防误触的方法是由连接于多个传感器电极且检测从主动笔发送出的下行链路信号的传感器控制器执行的防误触的方法,其中,包括:判定步骤,判定检测到的所述下行链路信号的相位是否与在所述传感器控制器与所述主动笔之间事先共有的相位一致;及输出步骤,在由所述判定步骤判定为一致的情况下,输出基于所述下行链路信号的所
述多个传感器电极处的电平的分布而导出的所述主动笔的位置。
14.本发明的传感器控制器是连接于多个传感器电极且检测从主动笔发送出的规定频率或规定波形的下行链路信号的传感器控制器,其中,判定检测到的所述下行链路信号的相位是否与在所述传感器控制器与所述主动笔之间事先共有的相位一致,在判定为一致的情况下,输出基于所述下行链路信号的所述多个传感器电极处的电平的分布而导出的所述主动笔的位置。
15.发明效果
16.若假定为人体未被充分地接地,则经由人体而检测出的下行链路信号成为与经由笔尖电极而检测出的下行链路信号相比相位进行了反转的信号。根据本发明,由于判定下行链路信号的相位,所以能够确定基于经由人体而检测到的下行链路信号而导出的位置。因此,能够不依赖于触摸检测等基于与主动笔的检测不同的过程的检测的结果而从主动笔的指示位置排除手掌的接触位置。
附图说明
17.图1是示出本发明的实施方式的电子设备1的结构的图。
18.图2是示出传感器电极群兼显示器4的详情的图。
19.图3是示出主动笔pe发送的下行链路信号ds的格式的图。
20.图4是说明数据信号的调制处理的图。
21.图5是示出主动笔pe、手掌pa及传感器电极群兼显示器4的等效电路的图。
22.图6的(a)是示出使用图5的等效电路模拟出的笔尖电极21的电位v
t
及手掌pa的电位vb的时间变化的图,(b)是示出使用图5的等效电路模拟出的线状导体4y-1的电位v
4y-1
及线状导体4y-2的电位v
4y-2
的时间变化的图。
23.图7的(a)是示出使用图5的等效电路模拟出的笔尖电极21的电位v
t
及手掌pa的电位vb的时间变化的图,(b)是示出使用图5的等效电路模拟出的线状导体4y-1的电位v
4y-1
及线状导体4y-2的电位v
4y-2
的时间变化的图。
24.图8是示出本发明的实施方式的传感器控制器2的结构的图。
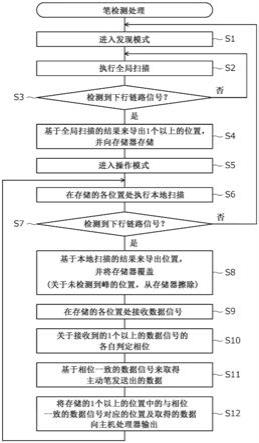
25.图9是示出传感器控制器2执行的笔检测处理的流程图。
26.标号说明
[0027]1ꢀꢀꢀꢀꢀꢀ
电子设备
[0028]
1a
ꢀꢀꢀꢀꢀ
面板面
[0029]2ꢀꢀꢀꢀꢀꢀ
传感器控制器
[0030]3ꢀꢀꢀꢀꢀꢀ
主机处理器
[0031]4ꢀꢀꢀꢀꢀꢀ
传感器电极群兼显示器
[0032]
4m
ꢀꢀꢀꢀꢀ
岛状导体
[0033]
4x、4y 线状导体
[0034]
10
ꢀꢀꢀꢀꢀ
mcu
[0035]
11
ꢀꢀꢀꢀꢀ
存储器
[0036]
12
ꢀꢀꢀꢀꢀ
接收部
[0037]
13
ꢀꢀꢀꢀꢀ
选择部
[0038]
20
ꢀꢀꢀꢀꢀ
芯体
[0039]
21
ꢀꢀꢀꢀꢀ
笔尖电极
[0040]
22
ꢀꢀꢀꢀꢀ
压力传感器
[0041]
23
ꢀꢀꢀꢀꢀ
开关
[0042]
24
ꢀꢀꢀꢀꢀ
控制电路
[0043]
25
ꢀꢀꢀꢀꢀ
蓄电池
[0044]
30
ꢀꢀꢀꢀꢀ
缓冲器
[0045]
31
ꢀꢀꢀꢀꢀ
带通滤波器
[0046]
32
ꢀꢀꢀꢀꢀ
模拟数字(ad)转换部
[0047]
33
ꢀꢀꢀꢀꢀ
解调部
[0048]
34
ꢀꢀꢀꢀꢀ
相关运算部
[0049]
ds
ꢀꢀꢀꢀꢀ
下行链路信号
[0050]
pa
ꢀꢀꢀꢀꢀ
手掌
[0051]
pe
ꢀꢀꢀꢀꢀ
主动笔
[0052]
us
ꢀꢀꢀꢀꢀ
上行链路信号
具体实施方式
[0053]
以下,一边参照附图,一边对本发明的实施方式进行详细说明。
[0054]
图1是示出本实施方式的电子设备1的结构的图。电子设备1是例如平板计算机等与笔输入及手指触摸输入对应的装置,如图1所示,构成为包含传感器控制器2、主机处理器3及传感器电极群兼显示器4。
[0055]
在图1中也图示了对电子设备1进行笔输入的主动笔pe。主动笔pe是与主动静电方式对应的触控笔,构成为能够与传感器控制器2之间双向地通信或者能够对传感器控制器2单向地发送信号。以下,将从传感器控制器2向主动笔pe发送的信号称作上行链路信号us,将从主动笔pe向传感器控制器2发送的信号称作下行链路信号ds。用户通过在设置于电子设备1的面板面1a(触摸面)上操作主动笔pe来进行笔输入,通过利用手指描摹面板面1a来进行手指触摸输入。
[0056]
主机处理器3是控制电子设备1的整体的处理器,后述的电子设备1内的各部分的动作在主机处理器3的控制下执行。传感器控制器2是使用传感器电极群兼显示器4内的传感器电极群(后述)来进行主动笔pe、用户的手指等指示体的面板面1a内的位置的导出和主动笔pe发送出的数据的接收的集成电路。传感器控制器2构成为将导出的位置及从主动笔pe接收到的数据逐次对主机处理器3输出。主机处理器3基于这样输入的位置及数据来进行数字墨水的生成及描绘。
[0057]
传感器电极群兼显示器4是用于实现笔输入及手指触摸输入的传感器电极群和构成显示器的电极群被统合的装置。作为传感器电极群兼显示器4的具体的形式,存在将构成显示器的电极群的一部分或全部也作为传感器电极群的一部分或全部来使用的in-cell型、构成显示器的电极群和传感器电极群电分离的on-cell型等,但在本实施方式中,设为传感器电极群兼显示器4是in-cell型来继续说明。不过,本发明也能够应用于传感器电极群兼显示器4是on-cell型的情况、传感器电极群和显示器为独立装置的情况。作为构成传
感器电极群兼显示器4的显示器,能够利用液晶显示器或有机el显示器等各种显示器,但在本实施方式中,设为是tft(thin film transistor:薄膜晶体管)型的液晶显示器来继续说明。
[0058]
图2是示出传感器电极群兼显示器4的详情的图。如该图所示,传感器电极群兼显示器4构成为从接近面板面1a的一侧起依次包含在xy平面内呈矩阵状地配置的多个岛状导体4m、分别在x方向上延伸且在y方向上并列的多个线状导体4y及分别在y方向上延伸且在x方向上并列的多个线状导体4x。需要说明的是,实际的传感器电极群兼显示器4除了这些以外还包含液晶层等各种构件,但在图2中省略了记载。
[0059]
多个岛状导体4m、多个线状导体4y、多个线状导体4x分别与主机处理器3及传感器控制器2的任一者以能够切换的方式连接。该切换由主机处理器3通过时间分割而执行。传感器电极群兼显示器4在各导体连接于主机处理器3的情况下作为显示器来使用,在连接于传感器控制器2的情况下作为传感器电极群来使用。
[0060]
在传感器电极群兼显示器4作为显示器来使用的情况下,主机处理器3向多个岛状导体4m的各自供给共通的电位vcom,并且将多个线状导体4x作为用于控制像素晶体管(未图示)的接通断开的栅极线来使用,将多个线状导体4y作为用于向像素供给数据的数据/源极线来使用。
[0061]
另一方面,在传感器电极群兼显示器4作为传感器电极群来使用的情况下,传感器控制器2将多个岛状导体4m的各自作为传感器电极来使用,进行自电容方式的手指触摸的检测,并且将多个线状导体4x、4y的各自作为传感器电极来使用,进行主动静电方式的主动笔pe的检测。
[0062]
在图2中也示出了主动笔pe的内部结构。如该图所示,主动笔pe构成为包含芯体20、笔尖电极21、压力传感器22、开关23、控制电路24及蓄电池25。
[0063]
芯体20是构成主动笔pe的笔尖的构件。芯体20的后端连接于压力传感器22。笔尖电极21是设置于芯体20的前端附近的电极,与控制电路24电连接。压力传感器22是检测向芯体20的前端施加的压力的传感器。开关23是设置于主动笔pe的壳体的表面的开关元件,构成为能够由用户进行接通断开操作。
[0064]
控制电路24是利用从蓄电池25供给的电力进行动作从而进行各种处理的电路。在控制电路24进行的处理中,除了主动笔pe的各部分的控制之外,还包含通过控制笔尖电极21的电位来发送下行链路信号ds的处理和通过对笔尖电极21的电位的变动进行检测并解调来接收上行链路信号us的处理。
[0065]
图3是示出控制电路24发送的下行链路信号ds的格式的图。图3(a)示出了在传感器控制器2和主动笔pe双向地通信的情况下还未检测到传感器控制器2的控制电路24所发送的下行链路信号ds。该情况下的下行链路信号ds由规定频率的无调制的载波信号即突发信号构成。
[0066]
图3(b)示出了在传感器控制器2和主动笔pe双向地通信的情况下控制电路24按照已接收的上行链路信号us而发送的下行链路信号ds。在主动笔pe对传感器控制器2单向地发送信号的情况下,也使用同样的下行链路信号ds。该下行链路信号ds构成为包含规定频率的无调制的载波信号即突发信号和利用发送数据调制规定频率的载波信号而成的数据信号。
[0067]
如图3(b)所示,由数据信号发送的发送数据构成为包含表示数据信号的开始的前导码和由上行链路信号us要求的数据。需要说明的是,也可以在数据信号的末尾配置循环冗余校验(crc)码等错误检测用的数据。
[0068]
前导码是在传感器控制器2与主动笔pe之间事先共有的规定数据,为了传感器控制器2从接收信号检测数据信号而使用。在由上行链路信号us要求的数据中,包含表示由压力传感器22检测到的压力的笔压值、表示开关23的接通断开的开关信息、保存于控制电路24内的存储器的笔id等。控制电路24按照接收到的上行链路信号us内包含的命令来从压力传感器22等取得数据,并向数据信号内配置。
[0069]
图4是说明数据信号的调制处理的图。如该图所示,控制电路24首先取得构成发送数据的符号串。符号是在调制中使用的信息的单位,包含被转换为位串的值和不被转换为位串的值。图示的“p”是不被转换为位串的符号的值的一例。被转换为位串的值是与规定位数的位串对应的值,在图4中,示出了与4位的位串对应的例子。
[0070]
控制电路24预先存储有将符号的值与扩频码(码片串)建立对应的表,按照该表,将构成发送数据的符号一个一个地转换为码片串。接着,控制电路24以避免0或1连续的方式对得到的码片串进行曼彻斯特编码后,利用曼彻斯特编码后的码片串来调制载波信号。在图4中示出了将该调制通过bpsk(binary phase shift keying:二进制相移键控)来进行的例子,但也可以使用其他的调制方式。由这样被调制后的载波信号的波形构成从笔尖电极21发送的下行链路信号ds的波形(发送波形)。
[0071]
返回图2,以传感器控制器2和主动笔pe双向地通信的情况为例来说明主动笔pe的检测的概略。还未检测到主动笔pe的传感器控制器2使用多个线状导体4x及多个线状导体4y的一方或双方来周期性地进行上行链路信号us的发送。接收到该上行链路信号us的主动笔pe首先发送图3(a)所示的类型的下行链路信号ds。传感器控制器2通过对多个线状导体4x及多个线状导体4y的全部依次进行扫描来取得该下行链路信号ds的各线状导体4x、4y处的信号电平。然后,基于其分布来导出主动笔pe的位置,并向存储器保存(全局扫描)。
[0072]
之后,再次接收到上行链路信号us的主动笔pe发送图3(b)所示的类型的下行链路信号ds。接收该下行链路信号ds的传感器控制器2首先仅使用位于保存于存储器的主动笔pe的位置的附近的规定个数的线状导体4x、4y来接收突发信号,基于其信号电平的分布来新导出主动笔pe的位置。然后,利用导出的位置来更新存储于存储器内的主动笔pe的位置(本地扫描)。接着,传感器控制器2使用最接近主动笔pe的位置的1个线状导体4x或线状导体4y来接收数据信号,从而取得主动笔pe发送出的数据。这样存储于存储器内的位置及取得的数据如上述那样从传感器控制器2对主机处理器3逐次输出。
[0073]
若也对从主动笔pe对传感器控制器2单向地发送下行链路信号ds的情况进行简单说明,则主动笔pe构成为周期性地发送图3(b)所示的类型的下行链路信号ds。传感器控制器2在还未检测到主动笔pe的阶段中,基于该下行链路信号ds来进行上述的全局扫描。在通过全局扫描而一旦将主动笔pe的位置保存于存储器后,传感器控制器2接着基于从主动笔pe发送的下行链路信号ds来进行上述的本地扫描及数据信号的接收。由此,传感器控制器2能够与传感器控制器2和主动笔pe双向地通信的情况同样地更新主动笔pe的位置并且取得主动笔pe发送出的数据。存储于存储器内的位置及取得的数据从传感器控制器2向主机处理器3逐次输出这一点也与传感器控制器2和主动笔pe双向地通信的情况是同样的。
[0074]
返回图1。在主动笔pe发送下行链路信号ds时,下行链路信号ds通过主动笔pe的壳体而也向保持着主动笔pe的用户的人体传递。其结果,若用户将手抵着面板面1a,则如图1所示,也会从用户的手掌pa发送下行链路信号ds。这样一来,在全局扫描中检测的信号电平的峰会成为2处,因此传感器控制器2对主动笔pe的位置的检测有可能不被正确地进行。于是,在本实施方式中,将传感器控制器2构成为:对下行链路信号ds包含在传感器控制器2与主动笔pe之间事先共有的规定波形的部分(即,与前导码对应的发送波形)的情况进行利用,基于该规定波形的部分的相位来判定接收到的下行链路信号ds的相位是否与在传感器控制器2与主动笔pe之间事先共有的相位一致,由此,能够从主动笔pe的指示位置排除手掌pa的接触位置。
[0075]
另外,为了实现该排除,需要在决定主动笔pe的指示位置前判定下行链路信号ds的相位,为此,需要利用全局扫描来检测多个位置,在该多个位置的各自处进行本地扫描及数据信号的接收。于是,在本实施方式中,以能够实现这样的处理的方式构成了传感器控制器2内的接收部。
[0076]
以下,首先一边参照图5~图7一边对下行链路信号ds与相位的关系进行说明,接着一边参照图8一边对设置于传感器控制器2内的接收部的结构进行说明后,一边参照图9一边对传感器控制器2进行的处理进行详细说明。
[0077]
图5是示出主动笔pe、手掌pa及传感器电极群兼显示器4的等效电路的图。在该等效电路中,人体是完全的导体,且视为浮置(float)状态。如图5所示,该等效电路构成为包含4个静电容c1~c4。静电容c1是最接近笔尖电极21的线状导体4y(以下,称作“线状导体4y-1”)与笔尖电极21之间的耦合电容。静电容c2是最接近手掌pa的线状导体4y(以下,称作“线状导体4y-2”)与手掌pa之间的耦合电容。静电容c3、c4分别是线状导体4y-1、4y-2与电子设备1的接地端之间的耦合电容。
[0078]
若将笔尖电极21相对于电子设备1的接地端的电位设为v
t
,将手掌pa相对于电子设备1的接地端的电位设为vb,将下行链路信号ds的电位设为vs,则它们具有以下的式(1)所示的关系。
[0079]vt-vb=vs…
(1)
[0080]
另外,若将电子设备1的接地端与笔尖电极21之间的阻抗设为z
tg
,将电子设备1的接地端与手掌pa之间的阻抗设为z
bg
,则根据基尔霍夫第一定律,以下的式(2)成立。
[0081]vt
/z
tg
+vb/z
bg
=0
…
(2)
[0082]
根据式(1)及式(2),得到以下的式(3)及式(4)。
[0083]vt
=-v
szbg
/(z
tg
+z
bg
)
…
(3)
[0084]vb
=v
szbg
/(z
tg
+z
bg
)
…
(4)
[0085]
从式(3)及式(4)可理解到,笔尖电极21的电位v
t
和手掌pa的电位vb成为互相反相的关系。本实施方式的传感器控制器2利用该关系来进行从主动笔pe的指示位置排除手掌pa的接触位置的处理。
[0086]
图6(a)及图7(a)是示出使用图5的等效电路模拟出的电位v
t
、vb的时间变化的图。另外,图6(b)及图7(b)是示出使用图5的等效电路模拟出的线状导体4y-1的电位v
4y-1
及线状导体4y-2的电位v
4y-2
的时间变化的图。不过,图6(a)(b)示出了耦合电容c1是1pf的情况,图7(a)(b)示出了耦合电容c1是0.1pf的情况。不管在哪个图中,都设为耦合电容c2、c3、c4
分别是3pf、100pf、100pf。
[0087]
如图6(a)及图7(a)所示,笔尖电极21的电位v
t
和手掌pa的电位vb为互相反相的关系。这是也如上述的式(3)及式(4)所示的结果。另一方面,从图6(a)及图7(a)的结果可理解到,电位vb的振幅比电位v
t
的振幅小。
[0088]
相对于此,如图6(b)及图7(b)所示,在线状导体4y-1的电位v
4y-1
和线状导体4y-2的电位v
4y-2
中,在成为互相反相的关系这一点上与电位v
t
及电位vb是同样的,但与电位v
t
、vb不同,振幅为相同的值。由于传感器控制器2实际检测的不是电位v
t
、vb而是电位v
4y-1
、v
4y-2
,所以从图6(b)及图7(b)的结果可理解到,即使仅观察检测的电位的振幅,也无法区分主动笔pe的指示位置和手掌pa的接触位置。于是,在本实施方式的传感器控制器2中,通过参照电位v
4y-1
、v
4y-2
的相位来进行从主动笔pe的指示位置排除手掌pa的接触位置的处理。
[0089]
图8是示出本实施方式的传感器控制器2的结构的图。不过,在该图中仅图示了设置于传感器控制器2内的各种结构中的下行链路信号ds的接收所涉及的部分。如该图所示,本实施方式的传感器控制器2构成为具有mcu(micro control unit:微控制单元)10、存储器11、n个接收部12-1~12-n及选择部13。
[0090]
mcu10是将存储于存储器11内的程序读出并执行的处理器。在由mcu10执行的处理中,包括传感器控制器2内的各部分的控制。存储器11是由易失性存储器或非易失性存储器、其双方构成的存储装置,存储由mcu10执行的程序,并且作为mcu10的工作存储器发挥功能。在作为该工作存储器的功能中,包含暂时地存储mcu10作为全局扫描及本地扫描的结果而导出的1个以上的位置的功能。另外,存储器11起到存储与存储于主动笔pe的控制电路24的扩频码(码片串)的表相同的表的作用。
[0091]
接收部12-1~12-n分别构成为具有缓冲器30、带通滤波器31、模拟数字(ad)转换部32、解调部33及相关运算部34。缓冲器30经由选择部13而连接于各多个线状导体4x、4y的任1个,起到将在连接的线状导体感应的电流放大并向带通滤波器31供给的作用。
[0092]
带通滤波器31是从缓冲器30的输出电流仅取出下行链路信号ds的频率所属的规定频段的信号的滤波电路。带通滤波器31起到从缓冲器30的输出电流除去低频噪声及高次谐波噪声的作用。
[0093]
ad转换部32是通过对带通滤波器31的输出信号进行采样及量化来取得下行链路信号ds的接收电平值的电路。需要说明的是,ad转换部32的采样频率被设定为比下行链路信号ds的频率充分高的频率。ad转换部32构成为将取得的接收电平值逐次向mcu10及解调部33供给。
[0094]
解调部33是通过基于从ad转换部32输出的一连串的接收电平值对下行链路信号ds进行解调来取得主动笔pe发送出的一连串的码片串的电路。解调部33取得的一连串的码片串向相关运算部34供给。
[0095]
相关运算部34是通过运算从解调部33供给的一连串的码片串与预先存储于存储器11内的多个码片串的各自的相关来将构成下行链路信号ds的符号的串复原的电路。由相关运算部34复原出的符号的串向mcu10供给。
[0096]
选择部13是设置于各多个线状导体4x、4y的各自与接收部12-1~12-n之间的多路复用器。选择部13的连接状态由mcu10控制。具体来说,mcu10首先在进行全局扫描时,以使各多个线状导体4x、4y的各自与接收部12-1依次连接的方式控制选择部13。然后,mcu10通
过参照从接收部12-1的ad转换部32依次输出的接收电平值来取得下行链路信号ds的接收电平的分布,导出该分布的峰的位置。在分布中存在多个峰的情况下,导出的位置也成为多个。mcu10将导出的1个以上的位置作为全局扫描的检测结果而向存储器11保存。
[0097]
在进行本地扫描时,mcu10向保存于存储器11的1个以上的位置的各自分配互相不同的接收部12-k(k是1~n的任一者),以对分配的接收部12-k的各自依次连接位于对应的位置的附近的各规定数个的线状导体4x、4y的各自的方式控制选择部13,通过参照作为其结果从接收部12-k的ad转换部32依次输出的接收电平值而针对每个接收部12-k取得下行链路信号ds的接收电平的分布。然后,mcu10针对每个接收部12-k导出该分布的峰的位置,利用导出的位置来覆盖存储于存储器11内的对应的位置。
[0098]
在接收数据信号时,mcu10向保存于存储器11的1个以上的位置的各自分配互相不同的接收部12-k,以对分配的接收部12-k的各自连接最接近对应的位置的线状导体4x(或线状导体4y)的方式控制选择部13。然后,参照作为其结果从各接收部12-k的相关运算部34依次输出的符号串,首先尝试前导码的检测。此时,mcu10除了预先存储的前导码之外,也尝试在输入到接收部12-k的下行链路信号ds的相位进行了反转的情况下输出的符号串中的与前导码对应的部分(以下,称作“反转前导码”)的检测。并且,在检测到前导码的情况下,判定为下行链路信号ds的相位与在传感器控制器2与主动笔pe之间事先共有的相位一致,另一方面,在检测到反转前导码的情况下,判定为下行链路信号ds的相位与在传感器控制器2与主动笔pe之间事先共有的相位不一致(进行了反转)。
[0099]
mcu10基于从接收到判定的结果是判定为具有与在传感器控制器2与主动笔pe之间事先共有的相位一致的相位的下行链路信号ds的接收部12-k输出的符号串来取得主动笔pe的发送数据,将其与关于该接收部12-k保存于存储器11内的位置一起向主机处理器3输出。其他的位置不向主机处理器3输出,由此,主可实现从动笔pe的指示位置排除手掌pa的接触位置。
[0100]
图9是示出传感器控制器2执行的笔检测处理的流程图。如该图所示,传感器控制器2首先进入用于检测主动笔pe的发现模式(步骤s1),执行将各多个线状导体4x、4y的全部依次扫描的全局扫描(步骤s2)。传感器控制器2判定作为执行了该全局扫描的结果而是否检测到下行链路信号ds(步骤s3),若未检测到则返回步骤s2而反复进行全局扫描。
[0101]
另一方面,在步骤s3中判定为检测到的情况下,传感器控制器2基于全局扫描的结果来导出1个以上的位置,并向图8所示的存储器11存储(步骤s4)。该导出的详情如上所述。结束了步骤s4的传感器控制器2进入接受利用已检测出的主动笔pe的笔输入的操作模式(步骤s5)。
[0102]
进入到操作模式的传感器控制器2在存储于存储器11的1个以上的位置的各自处,使用图8所示的接收部12-1~12-n并列地进行上述的本地扫描(步骤s6)。然后,传感器控制器2判定作为执行了该本地扫描的结果而是否检测到下行链路信号ds(步骤s7),若未检测到则返回发现模式而继续处理。另一方面,在判定为检测到的情况下,基于本地扫描的结果来导出位置,将保存于存储器11内的位置覆盖(步骤s8)。该导出的详情也如上所述。在此,根据位置,有可能在下行链路信号ds的接收电平的分布中检测不到峰。在这样的情况下,传感器控制器2进行将对应的位置从存储器11擦除的处理。
[0103]
接着,传感器控制器2在存储于存储器11的各位置处进行数据信号的接收(步骤
s9)。具体而言,取得从图8所示的各接收部12-k输出的符号串。然后,关于接收到的数据信号(符号串)的各自进行相位的判定(步骤s10。判定步骤)。如上所述,该判定通过以下来进行:在从各接收部12-k输出的符号串中尝试前导码及反转前导码的检测,在检测到前导码的情况下,判定为下行链路信号ds的相位与在传感器控制器2与主动笔pe之间事先共有的相位一致,另一方面,在检测到反转前导码的情况下,判定为下行链路信号ds的相位与在传感器控制器2与主动笔pe之间事先共有的相位不一致(进行了反转)。
[0104]
接着,传感器控制器2基于在步骤s10中判定为下行链路信号ds的相位一致的数据信号来取得主动笔pe的发送数据(步骤s11),将其和与该数据信号对应地保存于存储器11内的位置一起向主机处理器3输出(步骤s12。输出步骤)。保存于存储器11内的其他的位置不被输出。由此,仅有基于具有与在传感器控制器2与主动笔pe之间事先共有的相位一致的相位的下行链路信号ds而导出的位置和基于该下行链路信号ds而取得的数据向主机处理器3输出。传感器控制器2之后返回步骤s6而继续处理。
[0105]
如以上说明那样,根据由本实施方式的传感器控制器2执行的防误触的方法,由于在步骤s10中判定下行链路信号ds的相位,所以能够确定基于经由人体而检测到的下行链路信号ds而导出的位置。因此,能够不依赖于触摸检测等基于与主动笔pe的检测不同的过程的检测的结果而从主动笔pe的指示位置排除手掌pa的接触位置。
[0106]
以上,虽然对本发明的优选的实施方式进行了说明,但本发明丝毫不限定于这样的实施方式,本发明当然能够在不脱离其主旨的范围内以各种各样的方案来实施。
[0107]
例如,在上述实施方式中,说明了mcu10进行在从各接收部12-k输出的符号串中尝试前导码及反转前导码的检测的处理的例子,但在传感器控制器2和主动笔pe双向地通信的情况下,也可以省略该处理。即,在传感器控制器2和主动笔pe双向地通信的情况下,进入于操作模式的传感器控制器2处于与主动笔pe同步的状态。因此,能够预先知道在下行链路信号ds中包含前导码的定时,因此,通过在该定时下判定从各接收部12-k输出了前导码及反转前导码的哪一个来判定下行链路信号ds的相位即可。
[0108]
另外,在上述实施方式中,说明了基于前导码的相位来判定下行链路信号ds的相位的例子,但只要是在传感器控制器2与主动笔pe之间事先共有的规定数据即可,即使是前导码以外的数据,也能够为了判定下行链路信号ds的相位而同样地使用。例如,在数据信号中包含起始位、停止位的情况下,也可以基于这些位的任一方或双方的相位来判定下行链路信号ds的相位。
[0109]
另外,在数据信号中包含错误检测用的数据的情况下,也可以在连续地检测到错误的情况下判定为下行链路信号ds的相位进行了反转。或者,也可以在检测到错误的情况下,通过将从解调部33输出的码片串反转后向相关运算部34再输入而重新取得符号串,在取得的符号串中包含前导码的情况下,判定为下行链路信号ds的相位进行了反转。
[0110]
另外,在上述实施方式中,说明了在传感器控制器2内设置多个接收部12-1~12-n的例子,但也可以仅设置1个接收部。在该情况下,无法在多个位置处并行地判定下行链路信号ds的相位,但至少能够判定接收到的下行链路信号ds是从笔尖电极21及手掌pa的哪一个发送出的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1