基于精准称重的重量校准方法与流程
1.本发明涉及称量技术领域,尤其涉及一种基于精准称重的重量校准方法。
背景技术:
2.随着现代化工业迅猛发展,精准测量在各个行业均有应用,在测量精度上也提出了更高的要求,传统的测量是基友测量仪器完成测量的,且不同的测量仪器的测量范围是有限的,却精度也是有限的,如以砝码为基本单位时,测量的精度近为1g,对于小于1g的重量则无法进行进一步精准测量,因此各种测量仪器具有局限性。
3.为了克服这种局限性,电子称则应运而生,电子称是采用电子压感技术,即根据传感元件对不同的压力产生的变化效应转换得到重量数据。其实际获得的测量数据更为精准,但是电子称对于环境、平衡均会对最后的显示示数产生影响,使得测量的重量并不精准,影响测量精度。
技术实现要素:
4.为此,本发明提供一种基于精准称重的重量校准方法,可以解决测量精度不高的问题。
5.为实现上述目的,本发明提供一种基于精准称重的重量校准方法,包括:利用监控装置实时获取待称量物体在载物台上的第一图像;基于所述第一图像中待称量物体放置在载物台上的位置确定实际位置与目标位置的偏离度,以实际偏离度设置第一修正系数;在通过转换单元对载物台上的传感器阵列的实际信号进行转换时,利用第一修正系数对实际信号进行修正,获取第一修正值;将所述第一修正值作为待显示值进行显示,所述待显示值为待测量物体的重量;所述基于所述第一图像中待称量物体放置在载物台上的位置确定实际位置与目标位置的偏离度,以实际偏离度设置第一修正系数包括:建立第一坐标系,以载物台所在的平面为xy平面,以载物台的几何中心为坐标原点,以垂直于xy平面且通过几何中心的直线为z轴,预先设置有标准距离l0,若待称量物体的重心所在的位置与z轴重合,则无需进行修正;若待称量物体的重心所在的位置li与z轴所在直线的最短距离≤标准距离l0,则采用第一计算公式得到第一修正系数;若待称量物体的重心所在的位置li与z轴所在直线的最短距离>标准距离l0,则采用第二计算公式得到第一修正系数;所述第一计算公式得到的第一修正系数为(r0
‑
ri)/ r0;所述第二计算公式得到的第一修正系数为(ri
‑
r0)/ ri,其中r0表示基准位置到坐标原点的实际距离, ri表示待称量物体的重心所在位置到坐标原点的实际距离。
6.进一步地,所述通过转换单元对载物台上的传感器阵列的实际信号进行转换包括:获取相邻时刻的信号强度曲线,所述信号强度曲线包括每个传感单元的信号强度,与待称量物体接触的传感单元形成的信号强度曲线;获取第一时刻的第一信号强度曲线和第二时刻的第二信号强度曲线;所述第一信号强度曲线包括n1个传感单元的信号强度,所述第二信号强度曲线包括n2个传感单元的信号强度,若n1=n2,则表示第一强度信号曲线和第二强度信号曲线中的传感单元数量相同;将第一信号强度曲线和第二强度信号曲线在第一时刻和第二时刻的均值作为实际信号。
7.进一步地,若n1>n2,则以第一强度信号曲线对第二强度信号曲线予以调整,利用第一强度信号曲线填补第二强度信号曲线中的传感单元的数值缺省值。
8.进一步地,若n2>n1,以第二强度信号曲线对第一强度信号曲线予以调整,利用第二强度信号曲线填补第一强度信号曲线中的传感单元的数值缺省值。
9.进一步地,设置有精度值a,用以对称重过程中的测量精度进行判定,同时设置有标准精度值a0,若精度值a≥标准精度值a0,则表示在进行称量的过程中,对于待称量物体的称量精度满足要求,若精度值a<标准精度值a0,则表示在进行称量的过程中,对于待称量物体的称量精度不满足要求,则需要降低载物台的使用频次或进行维修。
10.进一步地,所述精度值a,a=m1
×
|n1
‑
n2|/|n1+n2|+m2
×
l0/|li
‑
l0|;其中m1表示信号值权重系数,m2表示偏移度权重系数,且m1+m2=1。
11.进一步地,所述基于所述第一图像中待称量物体放置在载物台上的位置确定实际位置与目标位置的偏离度包括:获取采集到的第一图像;基于待称量物体的形状构建感兴趣区域的轮廓;遍历所示第一图像,确定与所述轮廓重合的区域,以所述第一图像上与所述轮廓重合的区域作为待称量物体的位置,以所述轮廓的中心与第一图像的中心的偏离程度作为实际位置与目标位置的偏离度。
12.进一步地,所述监控装置为摄像头。
13.与现有技术相比,本发明的有益效果在于,通过。
14.尤其,当待称量物体置于载物台上时,待称量物体的重力作用在传感器阵列上,在传感器阵列中的每个传感单元与待称量物体的接触面积而形成不同的信号强度曲线,通过信号强度曲线获取实际信号值,在对该实际信号值进行转换时,以待称量物体的实际位置与目标位置的偏离度,根据偏离程度设置第一修正值,以对实际信号值进行修正,使得显示的待称量物体的重量值更为精准。在实际应用过程中,以待称量物体置于载物台的中心位置为基准信号,若在实际称量过程中,待称量物体偏离载物台的中心位置,则会产生基准信号的偏移,进而使得获取的实际信号值不够精准,因此本发明实施例通过第一修正系数表现待称量物体偏离载物台的中心位置的程度,然后将对基准信号的影响进行修正,使得经过修正的信号值能够相当于待称量物体置于载物台的中心,有效修正位置偏移产生的误差,实现重量的精准测量,提高测量精度。
15.尤其,通过设置标准距离l0实现对待称量物体的重心所在的位置li与z轴所在直线的最短距离的比较,并根据比较结果采用不同的计算公式来计算第一修正系数,使得待称量物体中心的偏移程度能够有效体现在第一修正系数上,实现偏移程度对重量的影响予以修正,降低重心偏移对压力传感器的信号影响,提高显示值的准确度。
16.尤其,通过对相邻时刻的强度信号曲线进行比较,并利用其中传感单元多的曲线对少的曲线内的信号值进行补充修正,以使得在传感单元由于客观原因缺失信号值的前提下,完成缺省信号值的补充和修正,使得基于修正后的强度信号曲线获取的实际信号更为精准,对于显示的重量测定更为精准。
17.尤其,通过设置标准精度值a0,用以对实际的精度值进行判断,评估精度值的大小,若是精度值a≥标准精度值a0,则表示精度较高,满足测量精度要求,若是不满足精度值要求则需要对载物台的使用频次进行降低或进行维修,以使载物台的称量精度满足要求。
18.尤其,通过对精度值的计算方法进行限定,通过信号值和偏移度来表示精度值,对于精度值的计算更为精确,对于载物台上待称量物体的重量测量更为精确。
19.尤其,通过对第一图像进行处理,以待称量物体的轮廓遍历第一图像,确定第一图像中感兴趣区域的实际位置,然后以图像中的位置与第一图像的中心的偏离程度作为实际位置与目标位置的偏离度,使得对于目标位置的确定更为精准,提高测量精度。
20.尤其,通过摄像头采集第一图像,使得对于图像的采集更为便利,提高称量校准的精确性以及便捷性,提高实用性。
附图说明
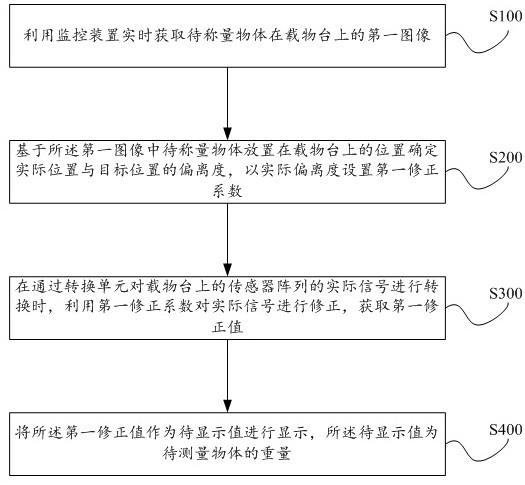
21.图1为本发明实施例提供的基于精准称重的重量校准方法的流程图。
具体实施方式
22.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
23.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
24.请参阅图1所示,本发明实施例提供的基于精准称重的重量校准方法包括:s100:利用监控装置实时获取待称量物体在载物台上的第一图像;s200:基于所述第一图像中待称量物体放置在载物台上的位置确定实际位置与目标位置的偏离度,以实际偏离度设置第一修正系数;s300:在通过转换单元对载物台上的传感器阵列的实际信号进行转换时,利用第一修正系数对实际信号进行修正,获取第一修正值;s400:将所述第一修正值作为待显示值进行显示,所述待显示值为待测量物体的重量。
25.具体而言,本发明实施例提供的基于精准称重的重量校准方法,载物台上设置有传感器阵列,当待称量物体置于载物台上时,待称量物体的重力作用在传感器阵列上,在传感器阵列中的每个传感单元与待称量物体的接触面积而形成不同的信号强度曲线,通过信号强度曲线获取实际信号值,在对该实际信号值进行转换时,以待称量物体的实际位置与
目标位置的偏离度,根据偏离程度设置第一修正值,以对实际信号值进行修正,使得显示的待称量物体的重量值更为精准。在实际应用过程中,以待称量物体置于载物台的中心位置为基准信号,若在实际称量过程中,待称量物体偏离载物台的中心位置,则会产生基准信号的偏移,进而使得获取的实际信号值不够精准,因此本发明实施例通过第一修正系数表现待称量物体偏离载物台的中心位置的程度,然后将对基准信号的影响进行修正,使得经过修正的信号值能够相当于待称量物体置于载物台的中心,有效修正位置偏移产生的误差,实现重量的精准测量,提高测量精度。
26.具体而言,所述基于所述第一图像中待称量物体放置在载物台上的位置确定实际位置与目标位置的偏离度,以实际偏离度设置第一修正系数包括:建立第一坐标系,以载物台所在的平面为xy平面,以载物台的几何中心为坐标原点,以垂直于xy平面且通过几何中心的直线为z轴,预先设置有标准距离l0,若待称量物体的重心所在的位置与z轴重合,则无需进行修正;若待称量物体的重心所在的位置li与z轴所在直线的最短距离≤标准距离l0,则采用第一计算公式得到第一修正系数;若待称量物体的重心所在的位置li与z轴所在直线的最短距离>标准距离l0,则采用第二计算公式得到第一修正系数;所述第一计算公式得到的第一修正系数为(r0
‑
ri)/ r0;所述第二计算公式得到的第一修正系数为(ri
‑
r0)/ ri,其中r0表示基准位置到坐标原点的实际距离; ri表示待称量物体的重心所在位置到坐标原点的实际距离。
27.具体而言,本发明实施例提供的基于精准称重的重量校准方法通过设置标准距离l0实现对待称量物体的重心所在的位置li与z轴所在直线的最短距离的比较,并根据比较结果采用不同的计算公式来计算第一修正系数,使得待称量物体中心的偏移程度能够有效体现在第一修正系数上,实现偏移程度对重量的影响予以修正,降低重心偏移对压力传感器的信号影响,提高显示值的准确度。
28.具体而言,所述通过转换单元对载物台上的传感器阵列的实际信号进行转换包括:获取相邻时刻的信号强度曲线,所述信号强度曲线包括每个传感单元的信号强度,与待称量物体接触的传感单元形成的信号强度曲线;获取第一时刻的第一信号强度曲线和第二时刻的第二信号强度曲线;所述第一信号强度曲线包括n1个传感单元的信号强度,所述第二信号强度曲线包括n2个传感单元的信号强度,若n1=n2,则表示第一强度信号曲线和第二强度信号曲线中的传感单元数量相同;将第一信号强度曲线和第二强度信号曲线在第一时刻和第二时刻的均值作为实际信号;若n1>n2,则以第一强度信号曲线对第二强度信号曲线予以调整,利用第一强度信号曲线填补第二强度信号曲线中的传感单元的数值缺省值;若n2>n1,以第二强度信号曲线对第一强度信号曲线予以调整,利用第二强度信号曲线填补第一强度信号曲线中的传感单元的数值缺省值。
29.具体而言,本发明实施例提供的基于精准称重的重量校准方法通过对相邻时刻的
强度信号曲线进行比较,并利用其中传感单元多的曲线对少的曲线内的信号值进行补充修正,以使得在传感单元由于客观原因缺失信号值的前提下,完成缺省信号值的补充和修正,使得基于修正后的强度信号曲线获取的实际信号更为精准,对于显示的重量测定更为精准。
30.具体而言,设置有精度值a,用以对称重过程中的测量精度进行判定,同时设置有标准精度值a0,若精度值a≥标准精度值a0,则表示在进行称量的过程中,对于待称量物体的称量精度满足要求,若精度值a<标准精度值a0,则表示在进行称量的过程中,对于待称量物体的称量精度不满足要求,则需要降低载物台的使用频次或进行维修。
31.具体而言,本发明实施例提供的基于精准称重的重量校准方法通过设置标准精度值a0,用以对实际的精度值进行判断,评估精度值的大小,若是精度值a≥标准精度值a0,则表示精度较高,满足测量精度要求,若是不满足精度值要求则需要对载物台的使用频次进行降低或进行维修,以使载物台的称量精度满足要求。
32.具体而言,所述精度值a,a=m1
×
|n1
‑
n2|/|n1+n2|+m2
×
l0/|li
‑
l0|;其中m1表示信号值权重系数,m2表示偏移度权重系数,且m1+m2=1。
33.具体而言,本发明实施例提供的基于精准称重的重量校准方法通过对精度值的计算方法进行限定,通过信号值和偏移度来表示精度值,对于精度值的计算更为精确,对于载物台上待称量物体的重量测量更为精确。
34.具体而言,所述基于所述第一图像中待称量物体放置在载物台上的位置确定实际位置与目标位置的偏离度包括:获取采集到的第一图像;基于待称量物体的形状构建感兴趣区域的轮廓;遍历所示第一图像,确定与所述轮廓重合的区域,以所述第一图像上与所述轮廓重合的区域作为待称量物体的位置,以所述轮廓的中心与第一图像的中心的偏离程度作为实际位置与目标位置的偏离度。
35.具体而言,本发明实施例提供的基于精准称重的重量校准方法通过对第一图像进行处理,以待称量物体的轮廓遍历第一图像,确定第一图像中感兴趣区域的实际位置,然后以图像中的位置与第一图像的中心的偏离程度作为实际位置与目标位置的偏离度,使得对于目标位置的确定更为精准,提高测量精度。
36.具体而言,所述监控装置为摄像头。
37.具体而言,本发明实施例提供的基于精准称重的重量校准方法通过摄像头采集第一图像,使得对于图像的采集更为便利,提高称量校准的精确性以及便捷性,提高实用性。
38.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
39.以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1