一种面向CT影像的冠状动脉智能辅助分析方法及系统
一种面向ct影像的冠状动脉智能辅助分析方法及系统
技术领域
1.本发明属于生物医电技术领域,具体涉及一种冠状动脉智能辅助分析方法及系统。
背景技术:
2.冠心病是一种发病率高且危害较大的心血管疾病,其全称为冠状动脉粥样硬化性心脏病,是冠状动脉血管发生动脉粥样硬化病变而引起血管狭窄或阻塞,造成心肌缺血、缺氧或坏死而导致的心脏病。随着我国经济的高速发展,人民生活水平不断提高以及饮食习惯的改变,冠心病的发病率逐年上升,现如今已经成为威胁我国人民生命安全的头号杀手,因此对冠脉疾病的早期预防和及时诊断尤为重要。
3.目前主流的诊疗方案是冠状动脉计算机断层血管造影(coronary computed tomography angiography,cta),又称为非创伤性血管成像技术,该技术通过在血管中注射含碘造影剂,并对患者做螺旋ct扫描,接着将获得的数据经过计算机处理得到血管图像。成像结果包含了冠脉血管以及相邻组织的二维断层图像,为临床医生诊断冠脉疾病提供了很多有价值的信息。
4.基于冠脉cta医学影像高效、准确地提取出冠脉血管中心线是冠状动脉粥样硬化性心脏病病灶区域可视化、冠脉疾病病情定量分析、评级、治疗方案规划的基石。冠脉血管中心线则可以提供对血管结构相关特征的定量描述,如血管长度,血管直径,血管分叉点以及血管曲率等形态参数和拓扑参数。同时利用冠脉中心线提供的有效信息,并结合cpr技术完成对冠脉血管及其周围组织信息的可视化分析。
5.但仅通过观察二维断层图像难以获得从复杂的背景中准确地分析出血管的内腔信息,因而很容易造成误诊漏诊。
6.目前的诊疗方案中,临床医生通常需要在工作站上人工对冠脉cta医学影像进行后处理,并根据后处理的结果诊断分析病情。这种手工操作不但工作量大、效率低而且由于大量的人为干预,处理结果存在一定的主观判断,因此,有必要提供一种面向冠脉cta医学影像的智能化后处理技术来避免当前技术中存在的缺陷。
7.现有技术中,专利——一种冠脉血管中心线匹配方法和系统(中国专利、申请公布号cn 108335284 a、申请公布日2018.07.27),该发明涉及计算机视觉技术领域,提供了一种冠脉血管中心线匹配方法和系统,其中的方法包括:根据当前帧完整冠脉血管中心线的图像,获取候选起始点集和候选终止点集;根据候选起始点集和候选终止点集,利用深度优先搜索算法,获取候选中心线;利用动态时间规整算法,获取候选中心线与上一帧完整冠脉血管中心线的图像中匹配的冠脉血管中心线的特征距离;根据特征距离确定匹配的冠脉血管中心线。其中的系统包括:端点获取模块,用于获取候选起始点集和候选终止点集;搜索模块,用于利用深度优先搜索算法获取候选中心线;匹配模块,用于利用动态时间规整算法确定匹配的冠脉血管中心线。该发明虽然能够提取冠脉血管中心线,但是在匹配速度和准确性上都不能达到较好的效果。
技术实现要素:
8.为了克服现有技术的不足,本发明提供了一种面向ct影像的冠状动脉智能辅助分析方法及系统,首先选择包含cta体数据的mhd文件或者dicom序列,获取cta体数据的体素、空间间距、三维图像大小信息,并进行可视化展示;然后使用基于三维空洞卷积神经网络追踪器的冠脉中心线提取方法完成冠脉中心线的全自动提取,生成冠脉中心线树并进行可视化展示;最终选择要分析的冠脉血管,在中心线三维展示区域将冠脉血管高亮展示,同时对选择的冠脉血管进行多角度拉直曲面重建,并进行可视化展示。本发明结合深度学习与迭代追踪算法完成冠脉中心线的全自动提取,充分利用了现有先进技术减轻临床医务人员的工作量,也减少了人为干预后处理技术的准确性,高效准确地实现医疗辅助作用。
9.本发明解决其技术问题所采用的技术方案包括如下步骤:
10.步骤1:通过文件选择器选择包含cta体数据的mhd文件或者dicom序列,获取cta体数据的体素、空间间距、三维图像大小信息,并进行可视化展示;
11.步骤2:根据步骤1获取的cta体数据的体素、空间间距、三维图像大小信息,使用基于三维空洞卷积神经网络的冠脉中心线提取方法完成冠脉中心线的全自动提取,生成冠脉中心线树并进行可视化展示;
12.步骤3:从步骤2提取的冠脉中心线对应的冠脉血管中选择要分析的冠脉血管,在冠脉中心线三维展示区域将选择的冠脉血管高亮展示,同时对选择的冠脉血管进行多角度拉直曲面重建,并进行可视化展示。
13.进一步地,所述步骤1中选择为dicom序列时,则将dicom序列的cta体数据灰度值标准化为mhd格式灰度值;然后开启文件处理线程,获取医学影像数据的体素、空间间距、三维图像大小信息。
14.进一步,所述步骤2的具体步骤如下:
15.步骤2
‑
1:数据预处理;
16.步骤2
‑1‑
1:手工标注冠脉中心线和冠状动脉入口;在手工标注的冠脉中心线上随机选择一个点x,并以点x为中心体素在cta体数据上切割出一个各向同性三维小体块,三维小体块大小为a
×
a
×
a;
17.设点x处冠脉半径为r,沿着手工标注的冠脉中心线在距点x距离为r的地方找到一点记为x_0,点x与x_0之间的位移矢量为δx;在三维空洞卷积神经网络的追踪器球体上标记多个点,将球心点x与多个点的连线方向中与位移矢量δx夹角最小的方向指定为参考方向,并在点x潜在运动方向d的参考分布中,将指定的参考方向类别概率设置为0.5;用同样的方法沿着手工标注的冠脉中心线在点x处另外一个方向距离为r的地方找到另一点,得到其参考方向以及类别概率;此时运动方向d的参考分布中有两个参考方向类别的概率被设置为0.5,而其余的方向类别概率设置为0.0;
18.步骤2
‑1‑
2:在手工标注的冠脉中心线上随机选择一个点x,使用在三维正态分布中采样的随机位移d,在任一方向将位置点x平移距离d,将平移后的点记为x
′
,以点x
′
作为中心体素在cta体数据上切割出一个各向同性三维小体块,三维小体块大小为a
×
a
×
a;
19.在手工标注的冠脉中心线上找到距离点x
′
最近的点x1,设点x1处冠脉半径为r,沿着手工标注的冠脉中心线在距点x1距离为r的地方找到一点记为x_0,点x1与x_0之间的位移矢量记为δx;在三维空洞卷积神经网络的追踪器球体上标记多个点,将球心点x1与多个点
的连线方向中与位移矢量δx夹角最小的方向指定为参考方向,并在点x
′
潜在运动方向d的参考分布中,将该参考方向类别概率设置为0.5;用同样的方法沿着手工标注的冠脉中心线在距位置点x1处另外一个方向距离为r的地方找到另一点,得到其参考方向以及类别概率;此时运动方向d的参考分布中有两个方向类别的概率被设置为0.5,而其余的方向类别概率设置为0.0;
20.步骤2
‑1‑
3:对步骤2
‑1‑
1和步骤2
‑1‑
2生成的各向同性三维小体块进行随机旋转以扩充数据集,每个各向同性三维小体块以随机角度θ∈[0,2π]绕x轴或y轴或z轴进行旋转,生成多个方向的三维小体块;
[0021]
步骤2
‑
2:构建冠脉中心线提取模型并进行训练;
[0022]
所述冠脉中心线提取模型包括三个并行的三维空洞卷积神经网络,分别为seedcnn、ostiacnn和trackcnn;三个三维空洞卷积神经网络的网络结构仅输出部分不同,输入均为尺寸大小为a
×
a
×
a的三维小体块,seedcnn的输出部分最后一层执行回归进行预测,预测值为输入的三维小体块的中心体素与冠脉中心线的接近程度;ostiacnn的输出部分最后一层执行回归进行预测,预测值为输入的三维小体块的中心体素与冠状动脉入口的接近程度;trackcnn的输出部分包含两个分支,第一个分支使用分类预测出输入的三维小体块的中心体素的方向类别概率分布,第二个分支利用回归预测出输入的三维小体块的中心体素处的冠脉半径;
[0023]
对seedcnn进行训练,训练数据为步骤2
‑
1生成的三维小体块和小体块中心体素与手工标注的冠脉中心线的接近程度;
[0024]
对ostiacnn进行训练,训练数据为步骤2
‑
1生成的三维小体块和小体块中心体素与手工标注的冠状动脉入口的接近程度;
[0025]
对trackcnn进行训练,训练数据为步骤2
‑
1生成的三维小体块和三维小体块的中心体素的参考方向以及类别概率和冠脉半径r;
[0026]
步骤2
‑
3:采用冠脉中心线提取模型获取入口点和种子点;
[0027]
步骤2
‑3‑
1:对输入的cta体数据进行预处理,将其中的肺部区域进行切除,并保留心脏部分;
[0028]
步骤2
‑3‑
2:在保留的心脏部分随机设定多个中心点,将每个中心点作为中心体素提取尺寸大小为a
×
a
×
a的三维小体块;
[0029]
步骤2
‑3‑
3:将提取出的三维小体块分别输入步骤2
‑
2中训练好的seedcnn和ostiacnn中;通过seedcnn得到输入的三维小体块中心体素与冠脉中心线接近程度的预测值,取该接近程度预测值由近及远的前n个值对应的中心体素作为种子点,构成种子点队列;通过ostiacnn得到输入的三维小体块中心体素与冠脉入口接近程度的预测值,取该接近程度预测值由近及远的前m个值对应的中心体素作为入口点,构成入口点队列;
[0030]
步骤2
‑
4:使用trackcnn结合迭代追踪算法模拟中心线追踪器提取单根冠脉中心线;
[0031]
步骤2
‑4‑
1:从种子点队列中随机选取一个种子点,以该种子点为中心体素提取三维小体块,将提取出的三维小体块输入trackcnn,得出该中心体素处的方向类别概率分布以及冠脉半径预测值;
[0032]
步骤2
‑4‑
2:从步骤2
‑4‑
1得到的方向类别概率分布中找到两个局部极大值作为当
前中心体素的前向运动方向和反向运动方向,前向运动方向和反向运动方向之间的夹角要求大于90度;
[0033]
步骤2
‑4‑
3:追踪器先沿着前向运动方向追踪中心线,追踪器以当前中心体素的冠脉半径预测值作为步长,沿着当前中心体素的前向运动方向到达新的位置点;然后以新的位置点为中心体素提取三维小体块,并将新提取出的三维小体块输入trackcnn模型得出新的中心体素处的方向类别概率分布以及半径预测值;再从方向类别概率分布中找出局部极大值作为新的跟踪方向,新的追踪方向与初始前向运动方向之间的夹角小于60度;重复此过程,直到满足终止条件时结束前向运动方向追踪;追踪器沿着反向运动方向追踪中心线的过程与追踪前向运动方向的过程相同;追踪器的终止条件为方向分类概率分布的归一化熵;
[0034]
将所有追踪器追踪过程中到达的位置点连接,即为单根冠脉中心线;
[0035]
步骤2
‑
5:生成冠脉中心线树;
[0036]
步骤2
‑5‑
1:如果步骤2
‑
4生成的单根冠脉中心线与入口点队列中的任一个入口点的距离小于等于设定值,则将该单根冠脉中心线保存;否则,如果步骤2
‑
4生成的单根冠脉中心线与入口点队列中的所有入口点的距离都大于设定值,则将该单根冠脉中心线丢弃;
[0037]
步骤2
‑5‑
2:将种子点队列中与单根冠脉中心线重叠的种子点从种子点队列中移除;
[0038]
步骤2
‑
6:从种子点队列中重新选取一个种子点,重复执行步骤2
‑
4和步骤2
‑
5,直到遍历种子点队列中的所有种子点,提取出多根冠脉中心线,形成冠脉中心线树。
[0039]
进一步地,所述步骤3中,对选定的冠脉血管,采用曲面重建方法沿着冠脉中心线将其拉直并重组,对重组数据沿中轴线进行0度、45度和90度切割得到多角度的曲面重建结果,最终将得到的血管剖面图进行可视化显示。
[0040]
进一步地,所述a=19。
[0041]
一种面向ct影像的冠状动脉智能辅助分析系统,包括:
[0042]
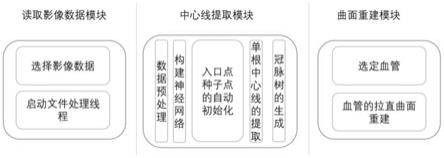
医学影像数据模块,用于通过文件选择器选择包含cta体数据的mhd文件或者dicom序列,获取cta体数据的体素、空间间距、三维图像大小信息,并进行可视化展示;
[0043]
中心线提取模块,用于根据获取的cta体数据的体素、空间间距、三维图像大小信息,使用基于三维空洞卷积神经网络的冠脉中心线提取方法完成冠脉中心线的全自动提取,生成冠脉中心线树并进行可视化展示;
[0044]
曲面重建模块,用于从中心线提取模块中提取的冠脉中心线对应的冠脉血管中选择要分析的冠脉血管,在冠脉中心线三维展示区域将选择的冠脉血管高亮展示,同时对选择的冠脉血管进行多角度拉直曲面重建,并进行可视化展示。
[0045]
本发明的有益效果如下:
[0046]
本发明结合深度学习与迭代追踪算法完成冠脉中心线的全自动提取,充分利用了现有先进技术减轻临床医务人员的工作量,也减少了人为干预后处理技术的准确性,高效准确地实现医疗辅助作用。同时,基于上述结果实现冠脉血管拉直曲面重建技术,并进行多角度切割,使得医生可以更加准确且全面的分析血管存在的狭窄程度、斑块数量等问题,从而辅助医生更精准地完成病情诊断。
附图说明
[0047]
图1为本发明实现框图。
[0048]
图2为本发明单根冠脉中心线提取流程图。
[0049]
图3为本发明冠脉中心线入口点自动的定位与种子点初始化流程图。
[0050]
图4为本发明实施例医学影像数据图示。
[0051]
图5为本发明实施例生成的冠脉中心线树及选定冠脉中心线并高亮展示图示。
[0052]
图6为本发明实施例冠状动脉多角度拉直曲面重建结果示意图。
具体实施方式
[0053]
下面结合附图和实施例对本发明进一步说明。
[0054]
本发明基于冠脉cta医学影像结合深度学习技术完成冠脉血管中心线的全自动提取,并使用cpr技术将位于不同层面的断层信息展示在同一个平面,使得三维空间中的血管结构能够在一幅图像上进行全面细致的展示,从而更好地辅助医生观察和分析冠状动脉的内腔信息,最终完成对冠脉疾病的诊断和治疗。
[0055]
如图1所示,一种面向ct影像的冠状动脉智能辅助分析方法及系统,包括如下步骤:
[0056]
步骤1:通过文件选择器选择包含cta体数据的mhd文件或者dicom序列,启动文件处理线程,获取cta体数据的体素、空间间距、三维图像大小信息,并进行可视化展示;
[0057]
步骤2:根据步骤1获取的cta体数据的体素、空间间距、三维图像大小信息,使用基于三维空洞卷积神经网络的冠脉中心线提取方法完成冠脉中心线的全自动提取,生成冠脉中心线树并进行可视化展示;
[0058]
步骤3:从步骤2提取的冠脉中心线对应的冠脉血管中选择要分析的冠脉血管,在冠脉中心线三维展示区域将选择的冠脉血管高亮展示,同时对选择的冠脉血管进行多角度拉直曲面重建,并进行可视化展示。
[0059]
进一步地,所述步骤1中选择为dicom序列时,则将dicom序列的cta体数据灰度值标准化为mhd格式灰度值;然后开启文件处理线程,获取医学影像数据的体素、空间间距、三维图像大小信息。
[0060]
进一步,所述步骤2的具体步骤如下:
[0061]
步骤2
‑
1:数据预处理;
[0062]
步骤2
‑1‑
1:如图4所示,手工标注冠脉中心线和冠状动脉入口;在手工标注的冠脉中心线上随机选择一个点x,并以点x为中心体素在cta体数据上切割出一个各向同性三维小体块,三维小体块大小为19
×
19
×
19;
[0063]
设点x处冠脉半径为r,沿着手工标注的冠脉中心线在距点x距离为r的地方找到一点记为x_0,点x与x_0之间的位移矢量为δx;在三维空洞卷积神经网络的追踪器球体上标记多个点,标记多个点,将球心点x与多个点的连线方向中与位移矢量δx夹角最小的方向指定为参考方向,并在点x潜在运动方向d的参考分布中,将指定的参考方向类别概率设置为0.5;用同样的方法沿着手工标注的冠脉中心线在点x处另外一个方向距离为r的地方找到另一点,得到其参考方向以及类别概率;此时运动方向d的参考分布中有两个参考方向类别的概率被设置为0.5,而其余的方向类别概率设置为0.0;
[0064]
步骤2
‑1‑
2:在手工标注的冠脉中心线上随机选择一个点x,使用在三维正态分布中采样的随机位移d,在任一方向将位置点x平移距离d,将平移后的点记为x
′
,以点x
′
作为中心体素在cta体数据上切割出一个各向同性三维小体块,三维小体块大小为19
×
19
×
19;
[0065]
在手工标注的冠脉中心线上找到距离点x
′
最近的点x1,设点x1处冠脉半径为r,沿着手工标注的冠脉中心线在距点x1距离为r的地方找到一点记为x_0,点x1与x_0之间的位移矢量记为δx;在三维空洞卷积神经网络的追踪器球体上标记多个点,将球心点x1与多个点的连线方向中与位移矢量δx夹角最小的方向指定为参考方向,并在点x
′
潜在运动方向d的参考分布中,将该参考方向类别概率设置为0.5;用同样的方法沿着手工标注的冠脉中心线在距位置点x1处另外一个方向距离为r的地方找到另一点,得到其参考方向以及类别概率;此时运动方向d的参考分布中有两个方向类别的概率被设置为0.5,而其余的方向类别概率设置为0.0;
[0066]
步骤2
‑1‑
3:对步骤2
‑1‑
1和步骤2
‑1‑
2生成的各向同性三维小体块进行随机旋转以扩充数据集,每个各向同性三维小体块以随机角度θ∈[0,2π]绕x轴或y轴或z轴进行旋转,生成多个方向的三维小体块;
[0067]
步骤2
‑
2:构建冠脉中心线提取模型并进行训练;
[0068]
所述冠脉中心线提取模型包括三个并行的三维空洞卷积神经网络,分别为seedcnn、ostiacnn和trackcnn;三个三维空洞卷积神经网络的网络结构仅输出部分不同,输入均为尺寸大小为a
×
a
×
a的三维小体块,seedcnn的输出部分最后一层执行回归进行预测,预测值为输入的三维小体块的中心体素与冠脉中心线的接近程度;ostiacnn的输出部分最后一层执行回归进行预测,预测值为输入的三维小体块的中心体素与冠状动脉入口的接近程度;trackcnn的输出部分包含两个分支,第一个分支使用分类预测出输入的三维小体块的中心体素的方向类别概率分布,第二个分支利用回归预测出输入的三维小体块的中心体素处的冠脉半径;
[0069]
对seedcnn进行训练,训练数据为步骤2
‑
1生成的三维小体块和小体块中心体素与手工标注的冠脉中心线的接近程度;
[0070]
对ostiacnn进行训练,训练数据为步骤2
‑
1生成的三维小体块和小体块中心体素与手工标注的冠状动脉入口的接近程度;
[0071]
对trackcnn进行训练,训练数据为步骤2
‑
1生成的三维小体块和三维小体块的中心体素的参考方向以及类别概率和冠脉半径r;
[0072]
步骤2
‑
3:如图2所示,采用冠脉中心线提取模型获取入口点和种子点;
[0073]
步骤2
‑3‑
1:对输入的cta体数据进行预处理,将其中的肺部区域进行切除,并保留心脏部分;
[0074]
步骤2
‑3‑
2:在保留的心脏部分随机设定多个中心点,将每个中心点作为中心体素提取尺寸大小为19
×
19
×
19的三维小体块;
[0075]
步骤2
‑3‑
3:将提取出的三维小体块分别输入步骤2
‑
2中训练好的seedcnn和ostiacnn中;通过seedcnn得到输入的三维小体块中心体素与冠脉中心线接近程度的预测值,取该接近程度预测值由近及远的前n个值对应的中心体素作为种子点,构成种子点队列;通过ostiacnn得到输入的三维小体块中心体素与冠脉入口接近程度的预测值,取该接近程度预测值由近及远的前m个值对应的中心体素作为入口点,构成入口点队列;
[0076]
步骤2
‑
4:如图3所示,使用trackcnn结合迭代追踪算法模拟中心线追踪器提取单根冠脉中心线;
[0077]
步骤2
‑4‑
1:从种子点队列中随机选取一个种子点,以该种子点为中心体素提取三维小体块,将提取出的三维小体块输入trackcnn,得出该中心体素处的方向类别概率分布以及冠脉半径预测值;
[0078]
步骤2
‑4‑
2:从步骤2
‑4‑
1得到的方向类别概率分布中找到两个局部极大值作为当前中心体素的前向运动方向和反向运动方向,前向运动方向和反向运动方向之间的夹角要求大于90度;
[0079]
步骤2
‑4‑
3:追踪器先沿着前向运动方向追踪中心线,追踪器以当前中心体素的冠脉半径预测值作为步长,沿着当前中心体素的前向运动方向到达新的位置点;然后以新的位置点为中心体素提取三维小体块,并将新提取出的三维小体块输入trackcnn模型得出新的中心体素处的方向类别概率分布以及半径预测值;再从方向类别概率分布中找出局部极大值作为新的跟踪方向,新的追踪方向与初始前向运动方向之间的夹角小于60度;重复此过程,直到满足终止条件时结束前向运动方向追踪;追踪器沿着反向运动方向追踪中心线的过程与追踪前向运动方向的过程相同;追踪器的终止条件为方向分类概率分布的归一化熵;
[0080]
将所有追踪器追踪过程中到达的位置点连接,即为单根冠脉中心线;
[0081]
步骤2
‑
5:生成冠脉中心线树;
[0082]
步骤2
‑5‑
1:如果步骤2
‑
4生成的单根冠脉中心线与入口点队列中的任一个入口点的距离小于等于设定值,则将该单根冠脉中心线保存;否则,如果步骤2
‑
4生成的单根冠脉中心线与入口点队列中的所有入口点的距离都大于设定值,则将该单根冠脉中心线丢弃;
[0083]
步骤2
‑5‑
2:将种子点队列中与单根冠脉中心线重叠的种子点从种子点队列中移除;
[0084]
步骤2
‑
6:从种子点队列中重新选取一个种子点,重复执行步骤2
‑
4和步骤2
‑
5,直到遍历种子点队列中的所有种子点,提取出多根冠脉中心线,如图5所示,形成冠脉中心线树。
[0085]
进一步地,所述步骤3中,对选定的冠脉血管,采用曲面重建方法沿着冠脉中心线将其拉直并重组,对重组数据沿中轴线进行0度、45度和90度切割得到多角度的曲面重建结果,最终将得到的血管剖面图进行可视化显示。
[0086]
一种面向ct影像的冠状动脉智能辅助分析系统,包括:
[0087]
医学影像数据模块,用于通过文件选择器选择包含cta体数据的mhd文件或者dicom序列,获取cta体数据的体素、空间间距、三维图像大小信息,并进行可视化展示;
[0088]
中心线提取模块,用于根据获取的cta体数据的体素、空间间距、三维图像大小信息,使用基于三维空洞卷积神经网络的冠脉中心线提取方法完成冠脉中心线的全自动提取,生成冠脉中心线树并进行可视化展示;
[0089]
曲面重建模块,用于从中心线提取模块中提取的冠脉中心线对应的冠脉血管中选择要分析的冠脉血管,在冠脉中心线三维展示区域将选择的冠脉血管高亮展示,同时对选择的冠脉血管进行多角度拉直曲面重建,并进行可视化展示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1