一种掘锚一体机动力学建模及仿真方法与流程
1.本发明涉及煤矿井下巷道掘进设备技术领域,具体涉及一种掘锚一体机动力学建模及仿真方法。
背景技术:
2.目前的掘锚一体机为定制化产品,没有相应的国家标准和行业标准对产品结构进行指导性选型。一般情况,对其关键承力部件进行强度校核时,根据经验人为设定典型姿态,取油缸极限推拉力和截割滚筒极限扭矩进行静态结构强度仿真,然后取一定的安全系数进行评估。静强度评估存在以下问题:
3.首先,掘锚一体机实际工作过程中是动态过程,包括典型的掏槽、下拉、拉底、举升4个动作组成一个完整的工作循环,采用现有静态评估方法不能准确的反映截割滚筒、滚筒机架、截割大臂、滑移架真实的受力状态,无法确定评估状态是否为最恶劣的工况,这往往导致预测结果与实际使用有较大的偏差,严重的甚至造成校核失败。
4.其次,工作装置的载荷由负载决定,掘锚一体机在工作过程中,煤岩情况一般非均质,由于夹矸的存在而千变万化,煤岩硬度一般为20mpa
‑
40mpa,煤矸石硬度一般为40mpa
‑
60mpa,这就导致截割滚筒的实际负载不可能是恒定值,导致各销轴传递的载荷也不可能是恒定值,因此,采用极限工况静强度评估的方法不能准确的反应结构件实际的受力状态。
5.最后,目前对工作装置进行有限元建模仿真时,对整机做了很大的简化,忽略车体弹性和整机附件自重因素的影响,可能无法真实反映整机的实际工作状态,这往往会导致较大的仿真值与实际值的偏差。目前,掘锚一体机,非工作装置的重量,如走台平台、电器侧平台、液压侧平台、刮板运输机构等部件重量可达整机的30%,这部分质量与整机之间存在动态响应,这种动态响应会影响工作装置的动力学关系,因此极限工况静强度仿真不能够反应真实的工作状态。
6.另外,通过实验手段暂不具备直接采集螺栓连接、销轴连接和轴套处的载荷的能力。因此评估某一个关键部件时,需要搭建整个工作装置的柔性体有限元模型,造成计算规模大、求解时间长、计算效率低以及时效性差。
7.以上因素均影响关键部件的校核和评估,结构强度分析评估是产品设计必不可少的一个环节,实际载荷的提取关系到结构强度评估的成败,对强度评估的准确性和时效性有着至关重要的作用。
8.综上所述,急需一种掘锚一体机动力学建模及仿真方法以解决现有技术中存在的问题。
技术实现要素:
9.本发明目的在于提供一种掘锚一体机动力学建模及仿真方法,旨在解决现有对于掘锚一体机的仿真方式存在的弊端,具体技术方案如下:
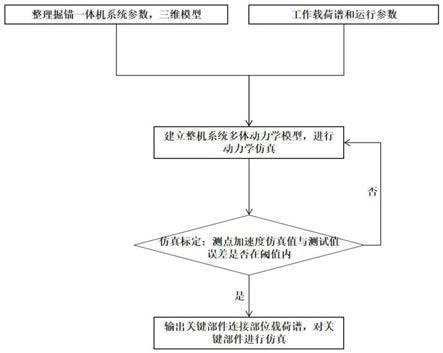
10.一种掘锚一体机动力学建模及仿真方法,包括以下步骤:
11.步骤s1:在掘锚一体机上设置多个三向加速度测点,并得到测点的实测加速度数据;
12.步骤s2:确定截割滚筒的载荷信息,获得掘锚一体机一个工作循环内的工作载荷谱;
13.步骤s3:建立整机多体动力学模型,结合运行参数和工作载荷谱作为激励进行动力学仿真,并将测点的实测加速度数据与对应测点的加速度仿真数据进行标定,得到目标整机系统动力学模型;
14.步骤s4:建立单个关键部件有限元模型,在目标整机系统动力学模型的仿真结果中提取该关键部件在一个工作循环的边界载荷作为边界条件,进行结构强度有限元仿真,获得该关键部件在一个工作循环内各个工况的应力状态。
15.以上技术方案中优选的,所述步骤s2中,一个工作循环包括掏槽工况、下拉工况、拉底工况和举升工况,将四个工况下的载荷信息汇总整理成一个工作循环内的工作载荷谱;其中拉底工况和举升工况截割滚筒载荷忽略不计,而掏槽工况和下拉工况截割滚筒载荷计算如下:
16.掏槽工况下,截割滚筒的载荷为:
17.下拉工况下,截割滚筒的载荷为:
18.其中,n
c
为截割滚筒上总截齿数,f
i
为第i个截齿承载的合力,f
i_m
为截割扭矩在第i个截齿上的作用力分量,f
i_t
为掏槽油缸推力在第i个截齿上的作用力分量,f
i_u
为举升油缸拉力在第i个截齿上的作用力分量。
19.以上技术方案中优选的,其中f
i_m
、f
i_t
和f
i_u
计算方式如下:
[0020][0021]
[0022][0023]
其中:m
d
为截割滚筒的截割扭矩,i
d
为实测的截割电机电流,n
d
为实测的截割滚筒转速,η为减速机效率,u为整机电器系统电压;r为截割滚筒半径,s
t
为掏槽油缸实时行程,即滚筒截割的截割深度;f
t
为掏槽油缸推力,f
u
为举升油缸拉力,β为举升油缸与水平面的实时夹角,l
b
为举升油缸上铰点距大臂下铰点距离,l为大臂长度,g
j
为截割滚筒总成重量,s
j
为举升油缸实时行程。
[0024]
以上技术方案中优选的,所述步骤s3具体如下:
[0025]
步骤s3.1:依据整机拓扑关系图,对整机系统参数、运行参数和工作载荷谱进行整理;
[0026]
步骤s3.2:基于整机系统参数和三维模型建立整机多体动力学模型,基于运行参数和工作载荷谱建立动力学模型驱动文件;将整机多体动力学模型和动力学模型驱动文件进行组合得到整机系统动力学模型;
[0027]
步骤s3.3:基于实测加速度数据,对整机系统动力学模型的对应测点加速度仿真数据进行标定;若标定结果满足要求,则认为整机系统动力学模型为目标整机系统动力学模型。
[0028]
以上技术方案中优选的,所述整机系统参数包括设备基本参数和工作装置中的截齿数、截割滚筒半径、截割大臂长度、各子部件质量属性及转动惯量参数;运行参数包括各油缸控制参数、截割减速机参数和截割减速比参数;工作载荷谱包括截割滚筒扭矩、掏槽油缸实时行程、掏槽油缸实时压力、举升油缸实时压力、举升油缸实时行程和举升油缸与水平面间的实时夹角。
[0029]
以上技术方案中优选的,整机多体动力学模型为整机多刚体动力学模型,整机多刚体动力学模型包括工作装置、行走装置及子系统附件;工作装置包括截割滚筒、截割大臂、滑移架、导轨、举升油缸和掏槽油缸,且工作装置中的各部件均赋予真实的质量属性和转动惯量;行走装置包括底盘机构,且赋予真实的质量属性和转动惯量;子系统附件包括走台平台、刮板运输机构、推铲机构、液压侧平台和电器侧平台,且子系统附件中各附件均赋予真实的质量属性和转动惯量。
[0030]
以上技术方案中优选的,所述步骤s3.3中标定过程如下:
[0031]
步骤s3.3.1:对一个工作循环内测点的实测加速度数据进行滤波处理,得到一个工作循环平顺的加速度曲线,设定工作循环内掏槽工况、下拉工况、拉底工况和举升工况下测点在x、y、z三向实测加速度值作为目标值;
[0032]
步骤s3.3.2:选取设计变量,对整机系统动力学模型完成一个完整的工作循环的
仿真;其中,以仿真结果中测点的加速度仿真值与目标值误差最小为目标函数,进行优化设计,在设计变量的设定范围内寻找最优参数值;
[0033]
步骤s3.3.3:计算出加速度仿真值相应对各设计变量的导数,筛选出步骤s3.3.2的优化过程中对加速度仿真值最敏感的变量,记为敏感设计变量,以敏感设计变量为后续处理的参数;
[0034]
步骤s3.3.4:采用hammersley抽样方法,在每个敏感设计变量的设计范围内进行随机抽样,并进行仿真计算,从仿真结果中提取测点的加速度仿真数据,得到一个完整的工作循环的加速度曲线;
[0035]
步骤s3.3.5:从步骤s3.3.4的基础上,提取掏槽工况、下拉工况、拉底工况和举升工况下测点在x、y、z三向的加速度仿真值,将加速度仿真值与步骤s3.3.1中的目标值进行对比,得到加速度仿真数据与实测加速度数据间的误差值;
[0036]
步骤s3.3.6:取满足误差值小于10%的敏感设计变量的参数值为最终参数值,以最终参数值下的模型为目标整机系统动力学模型,得到最终整机多体动力学仿真结果。
[0037]
以上技术方案中优选的,所述步骤s3.3.3中根据下式筛选出敏感设计变量:
[0038][0039][0040]
其中,a
s_l
为在设计变量下整机系统多体动力学仿真结果中测点的加速度仿真值,其中l为测点加速度标号;k
j
表示下标为j的刚度设计变量,c
j
表示下标为j的阻尼设计变量。
[0041]
以上技术方案中优选的,所述步骤s4中,关键部件包括截割滚筒机架、截割大臂、滑移架、导轨及连接螺栓。
[0042]
以上技术方案中优选的,所述测点的个数为三个,分别设置于截割大臂、截割滚筒机架和滑移架上。
[0043]
应用本发明的技术方案,具有以下有益效果:
[0044]
本发明的方法通过获取截割滚筒在一个工作循环内的实际载荷信息,进而得到掘锚一体机在一个完整工作循环内的工作载荷谱,贴合掘锚一体机实际施工中的实际载荷,而非采用静态评估的方式来评估工作装置的受力状态,本发明的方法评估的结果更加准确,预测结果与实际使用偏差小。
[0045]
建立掘锚一体机整机动力学模型,结合实际工作载荷谱完成整机多体动力学仿真,并选取连接部位的刚度值和阻尼值作为设计变量,同时筛选出对结果影响较大的变量作为敏感设计变量,大大缩减了计算量,最终得到吻合物理实际的目标整机系统动力学模型,此方法更符合物理实际,仿真精度更高,对新产品的结构研发和老产品的结构优化具有指导意义。
[0046]
从整机动力学仿真结果中提取关键部件的边界载荷,对关键部件进行结构强度仿真,此方法获得的关键部件热点区域更精准,更能反映实际工作状态,并且可为后续疲劳寿命评估提供数据支撑。
[0047]
采用本发明的方法,针对不同的地质条件和煤岩硬度,能够快速、准确的得到掘锚机关键部件的真实应力状态,评估结构强度是否满足强度要求,指导设计人员进行关键部件的设计和改进,解决关键部件设计缺乏理论依据,设计成品适应性差的问题。
[0048]
本发明方法对工作装置、行走装置及子系统附件均赋予真实的质量属性和转动惯量,在仿真的过程中充分考虑这部分质量与整机之间的动态响应,可以更加准确的模拟设备真实的工作状态。
[0049]
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
[0050]
构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0051]
图1是本发明掘锚一体机动力学建模及仿真方法的流程图;
[0052]
图2是工作载荷谱获取流程图;
[0053]
图3是掘锚一体机拓扑模型结构图;
[0054]
图4是掘锚一体机组成结构示意图;
[0055]
图5是工作装置结构简图;
[0056]
图6是测点设置示意图;
[0057]
图7是工作循环示意图;
[0058]
其中,1、刮板运输机构,2、液压侧平台,3、工作装置,3.1、截割滚筒,3.2、截割大臂,3.3、掏槽油缸,3.4、滑移架,3.5、导轨,3.6、举升油缸,4、推铲机构,5、底盘机构,6、电器侧平台。
具体实施方式
[0059]
为了便于理解本发明,下面将对本发明进行更全面的描述,并给出了本发明的较佳实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
[0060]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
[0061]
实施例1:
[0062]
参见图1
‑
7,一种掘锚一体机动力学建模及仿真方法,包括以下步骤:
[0063]
步骤s1:在掘锚一体机上设置多个三向加速度测点,并得到测点的实测加速度数据;本实施例中所述测点的个数为三个,分别设置于截割大臂、截割滚筒机架和滑移架上,如图6所示的1号测点、2号测点和3号测点。
[0064]
步骤s2:确定截割滚筒的载荷信息,获得掘锚一体机一个工作循环内的工作载荷谱;
[0065]
步骤s3:建立整机多体动力学模型,结合运行参数和工作载荷谱作为激励进行动力学仿真,并将测点的实测加速度数据与对应测点的加速度仿真数据进行标定,得到目标
整机系统动力学模型;
[0066]
步骤s4:建立单个关键部件有限元模型,在目标整机系统动力学模型的仿真结果中提取该关键部件在一个工作循环的边界载荷作为边界条件,进行结构强度有限元仿真,获得该关键部件在一个工作循环内各个工况的应力状态。
[0067]
优选的,所述步骤s2中,一个工作循环包括掏槽工况、下拉工况、拉底工况和举升工况,参见图7,其中,掏槽工况为:截割大臂举到最高点,滑移架在导轨最后端,掏槽油缸推动滑移架、截割大臂、截割滚筒向前移动,截割滚筒向前截割煤壁;下拉工况为:掏槽油缸全伸后,举升油缸收缩,带动截割大臂向下转动,截割滚筒向下运动截割煤壁;拉底工况为:举升油缸全缩后,截割滚筒到达最低点,下拉工况完成,掏槽油缸收缩,带动滑移架、截割大臂、截割滚筒向后移动;举升工况为:举升油缸伸出,推动截割大臂向上转动至最高点,整机向前行走,为下一个工作循环做准备。
[0068]
将四个工况下的载荷信息汇总整理成一个工作循环内的工作载荷谱;其中拉底工况和举升工况截割滚筒载荷近似为空载,因此忽略不计;截割滚筒对壁面截割主要分掏槽和下拉2个阶段,下面对掏槽工况和下拉工况截割滚筒载荷计算进行详细说明。
[0069]
首先需要计算截割滚筒的截割扭矩m
d
,其中
[0070]
进一步的,在掏槽截割工况下,截割滚筒在最高位置,煤壁给截割滚筒的载荷由掏槽油缸的推力f
t
提供,二者为作用力与反作用力关系,f
t
的计算方式如下:
[0071]
f
t
=p
t
×
a
t_h
,
[0072]
完成掏槽后,进行下拉截割,举升油缸的拉力f
u
的计算方式如下:
[0073]
f
u
=p
j
×
(a
j_h
‑
a
j_g
),
[0074]
其中,p
t
为掏槽油缸压力,a
t_h
为掏槽油缸活塞面积,p
j
为举升油缸压力,a
j_h
为举升油缸活塞面积,a
j_g
为举升油缸活塞杆面积。
[0075]
然后结合举升油缸与水平面间的夹角(即举升油缸的俯仰角)、各油缸实时行程以及结构的设计参数,可以得到截割大臂的位置及姿态信息,从而得到参与截割的截齿上的载荷信息,具体如下:
[0076]
首先,计算截割扭矩m
d
作用在截齿上的载荷f
i_m
:
[0077][0078]
然后计算掏槽油缸作用在截齿上的载荷f
i_t
:
[0079][0080]
接着计算举升油缸作用在截齿上的载荷f
i_u
:
[0081][0082]
其中:i
d
为实测的截割电机电流,n
d
为实测的截割滚筒转速,η为减速机效率,u为整机电器系统电压,本实施例中为3300v,m
d
为截割滚筒的截割扭矩,r为截割滚筒半径,s
t
为掏槽油缸实时行程,即滚筒截割的截割深度;f
t
为掏槽油缸推力,f
u
为举升油缸拉力,β为举升油缸与水平面的实时夹角,l
b
为举升油缸上铰点距大臂下铰点距离,l为大臂长度(参见图5,即大臂下铰点距截割滚筒中心距离),g
j
为截割滚筒总成重量,s
j
为举升油缸实时行程。
[0083]
本实施例中:n
d
通过在滚筒机架上安装转速传感器实时测得,i
d
通过监控截割电机的工作状态,实时输出工作状态下截割电机电流,β通过在举升油缸上加装角度传感器测得,p
t
和p
j
通过分别在掏槽油缸、举升油缸加装压力传感器测得,s
t
和s
j
通过分别在掏槽油缸、举升油缸加装位移传感器测得,以上参数均为掘锚一体机在工地施工中实测获得。
[0084]
根据作用力与反作用力的关系可知,在掏槽截割和下拉截割工况下煤壁恒定作用在截齿上的周向载荷为f
i_m
,在掏槽截割工况下,截齿同时承受水平载荷f
i_t
,在下拉截割工况下,截齿同时承受垂向载荷f
i_u
,因此可得:
[0085]
掏槽工况下,截割滚筒的载荷为:
[0086]
下拉工况下,截割滚筒的载荷为:
[0087]
其中,n
c
为截割滚筒上总截齿数,f
i
为第i个截齿承载的合力,f
i_m
为截割扭矩在第i个截齿上的作用力分量,f
i_t
为掏槽油缸推力在第i个截齿上的作用力分量,f
i_u
为举升油缸拉力在第i个截齿上的作用力分量。
[0088]
优选的,本实施例中所述步骤s3具体如下:
[0089]
步骤s3.1:依据整机拓扑关系图(如图3),对整机系统参数、运行参数和工作载荷谱进行整理;
[0090]
优选的,所述整机系统参数包括设备基本参数和工作装置中的截齿数、截割滚筒半径、截割大臂长度、各子部件质量属性及转动惯量参数;运行参数包括各油缸控制参数、截割减速机参数和截割减速比参数;工作载荷谱包括截割滚筒扭矩、掏槽油缸实时行程、掏槽油缸实时压力、举升油缸实时压力、举升油缸实时行程和举升油缸与水平面间的实时夹角。
[0091]
步骤s3.2:基于整机系统参数和三维模型建立整机多体动力学模型,基于运行参数和工作载荷谱建立动力学模型驱动文件;将整机多体动力学模型和动力学模型驱动文件进行组合得到整机系统动力学模型;
[0092]
优选的,整机多体动力学模型为整机多刚体动力学模型,参见图4和图5,整机多刚体动力学模型包括工作装置3、行走装置及子系统附件;工作装置3包括截割滚筒3.1、截割大臂3.2、滑移架3.4、导轨3.5、举升油缸3.6和掏槽油缸3.3,且工作装置中的各部件均赋予真实的质量属性和转动惯量;行走装置包括底盘机构5,且赋予真实的质量属性和转动惯量;子系统附件包括走台平台、刮板运输机构1、推铲机构4、液压侧平台2和电器侧平台6,且子系统附件中各附件均赋予真实的质量属性和转动惯量。
[0093]
步骤s3.3:基于实测加速度数据,对整机系统动力学模型的对应测点加速度仿真数据进行标定;若标定结果满足要求,则认为整机系统动力学模型为目标整机系统动力学模型,若标定结果不满足要求则需要对整机系统动力学模型进行修正(具体是通过改变下面的提到的设计变量进行修正,由于设计变量在对应的设计范围内取值,因此必然会得到目标整机系统动力学模型)。
[0094]
所述步骤s3.3中标定过程如下:
[0095]
步骤s3.3.1:对一个工作循环内测点的实测加速度数据进行滤波处理,得到一个工作循环平顺的加速度曲线,设定工作循环内掏槽工况、下拉工况、拉底工况和举升工况下测点在x、y、z三向实测加速度值作为目标值;
[0096]
具体是:将掏槽截割工况下测点的x、y、z三向实测加速度值(a
t_1x
,a
t_1y
,a
t_1z
),
[0097]
下拉截割工况下测点的x、y、z三向实测加速度值(a
t_2x
,a
t_2y
,a
t_2z
),
[0098]
拉底工况下测点的x、y、z三向实测加速度值(a
t_3x
,a
t_3y
,a
t_3z
),
[0099]
大臂举升工况下测点的x、y、z三向实测加速度值(a
t_4x
,a
t_4y
,a
t_4z
),作为目标值。
[0100]
步骤s3.3.2:选取设计变量,对整机系统动力学模型完成一个完整的工作循环的仿真;其中,以仿真结果中测点的加速度仿真值与目标值误差最小为目标函数,进行优化设计,在设计变量的设定范围内寻找最优参数值;本实施例中设计变量如下:
[0101]
截割滚筒与滚筒机架连接部位在x、y、z三向的刚度k
1x
、k
1y
、k
1z
和两者间在x、y、z三向的结构阻尼c
1x
、c
1y
、c
1z
;截割大臂和滑移架连接孔在x、y、z三向刚度k
2x
、k
2y
、k
2z
和两者间在x、y、z三向的结构阻尼c
2x
、c
2y
、c
2z
;举升油缸的刚度k3和阻尼c3;掏槽油缸的刚度k4和阻尼c4;
[0102]
其中:k
1x
、k
1y
、k
1z
、k
2x
、k
2y
、k
2z
、k3和k4∈(0.6e5~2.0e5)n/mm,c
1x
、c
1y
、c
1z
、c
2x
、c
2y
、c
2z
、c3和c4∈(0.01~1);
[0103]
步骤s3.3.3:计算出加速度仿真值相应对各设计变量的导数,筛选出步骤s3.3.2的优化过程中对加速度仿真值最敏感的变量,记为敏感设计变量;并以敏感设计变量为后续处理的参数;
[0104]
优选的,所述步骤s3.3.3中根据下式筛选出敏感设计变量:
[0105][0106][0107]
其中,a
s_l
为在设计变量下整机系统多体动力学仿真结果中测点的加速度仿真值,其中l为测点加速度标号,本实施例中l=1x,1y,1z,2x,2y、2z、3x、3y、3z、4x、4y、4z;k
j
表示
下标为j的刚度设计变量,c
j
表示下标为j的阻尼设计变量,本实施例j=1x,1y,1z,2x,2y,2z,3,4;
[0108]
本实施例中筛选出来的敏感设计变量为k
1x
、c
1x
、k
2x
、k
2y
、c
2x
、c
2y
、k3、c3、k4和c4。
[0109]
步骤s3.3.4:采用hammersley抽样方法,在每个敏感设计变量的设计范围内进行随机抽样,并进行仿真计算,从仿真结果中提取测点的加速度仿真数据,得到一个完整的工作循环的加速度曲线;
[0110]
步骤s3.3.5:从步骤s3.3.4的基础上,提取掏槽工况、下拉工况、拉底工况和举升工况下测点在x、y、z三向的加速度仿真值,将加速度仿真值与步骤s3.3.1中的目标值进行对比,得到加速度仿真数据与实测加速度数据间的误差值;
[0111]
本实施例中加速度仿真值具体包括(敏感设计变量下得到的加速度仿真值如下):
[0112]
掏槽截割工况下测点在x、y、z三向加速度仿真值(a
s_1x
,a
s_1y
,a
s_1z
),
[0113]
下拉截割工况下测点在x、y、z三向加速度仿真值(a
s_2x
,a
s_2y
,a
s_2z
),
[0114]
拉底工况下测点在x、y、z三向加速度仿真值(a
s_3x
,a
s_3y
,a
s_3z
),
[0115]
大臂举升工况下测点在x、y、z三向加速度仿真值(a
s_4x
,a
s_4y
,a
s_4z
);
[0116]
根据下式计算误差值:
[0117][0118]
其中:δ
k
为敏感设计变量下得到的加速度仿真值与目标值间的误差值,a
t_k
为目标值,a
s_k
为在敏感设计变量下得到的加速度仿真值,k=1x,1y,1z,2x,2y、2z、3x、3y、3z、4x、4y、4z;
[0119]
由此可得:
[0120]
掏槽截割工况下测点的三向加速度值误差(δ
1x
,δ
1y
,δ
1z
);
[0121]
下拉截割工况下测点的三向加速度值误差(δ
2x
,δ
2y
,δ
2z
);
[0122]
拉底工况下测点的三向加速度值误差(δ
3x
,δ
3y
,δ
3z
);
[0123]
大臂举升工况下测点的三向加速度值误差(δ
4x
,δ
4y
,δ
4z
)。
[0124]
步骤s3.3.6:对各个测点均进行步骤s3.3.1
‑
s3.3.5处理,取满足误差值均小于10%的敏感设计变量的参数值为最终参数值,以最终参数值下的模型为目标整机系统动力学模型,得到最终整机多体动力学仿真结果。
[0125]
优选的,所述步骤s4中,关键部件包括截割滚筒机架、截割大臂、滑移架、导轨及连接螺栓,关键部件的有限元模型在hypermesh或patran或ansa等前处理软件中完成。在整机多体动力学仿真结果中提取关键部件的销轴连接部位和/或栓接部位的载荷值作为边界条件。
[0126]
在对关键部件完成一个工作循环仿真计算后,输出完整工作循环的应力结果,设计人员可以对其进行强度评估。依据结构强度评估标准,对分析结果进行评价,针对不同矿区的地质条件,判断现有掘锚一体机是否适用,如果不适用,可对关键部件提出针对性的整改方案。
[0127]
采用本发明的仿真方法,可以针对目标矿区的地质条件,判断现有机型的应力水平是否能够满足使用环境对结构可靠性的要求,避免盲目使用现有机型,而达不到使用要求;另外,根据仿真结构可以对现有机型关键部件针对目标矿区地质条件进行整改,经过局
部整改和加强,使机型可以满足目标矿区的可靠性需求,提高产品适用性。
[0128]
通过本发明的仿真方法,针对不同矿区的地质条件和煤岩硬度,能够精准得到掘锚机关键部件的结构强度是否满足强度要求,指导设计人员进行关键部件的设计,解决关键部件设计缺乏理论依据,设计成品适应性差的问题。
[0129]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1