1.本发明属于智慧起重技术领域,尤其涉及一种堆场起重机圆筒件定位及抓钩挂钩方法。
背景技术:2.圆筒件如何快速定位及抓钩挂钩是影响堆场起重机运行效率的一个关键因素,然而,目前堆场起重机吊装圆筒件还基本采用人工作业方式,对吊装圆筒件进行定位及抓钩挂钩主要基于经验和人眼观察,加上连续高强度工作带来的视觉疲劳以及人眼视觉盲区,定位的准确性和抓钩挂钩的效率就会大打折扣。就此而言,起重机的智能化水平还有待进一步提高,以满足智慧起重机的应用需求。因而,寻求一种基于机器视觉的堆场起重机圆筒件快速定位及抓钩挂钩方法不仅有助于丰富起重机高效运行的理论知识,而且有很好的实际应用及工程示范价值。
3.另外,在对目标件进行定位时,传统的方式多是通过卷积等方式提取特征或是将图像与对应的模板进行比对从而确定轮廓,需要进行大量的计算,其执行效率较低,对于起重机上的相关控制部件来说,耗时相对较长,要求相对较高,因此,需要解决定位时的执行效率问题。
技术实现要素:4.为了解决背景技术中的问题,本发明首先给出了一种堆场起重机圆筒件定位方法,其次给出了一种抓钩挂钩方法。
5.一种堆场圆筒件定位方法,用于堆场起重机找到堆场中存放的目标圆筒件的中心,从而进行定位。
6.起重机的小车上,设有可垂直移动的抓钩,抓钩中心安装有分辨率为p
x
×
p
y
的工业相机,规定工业相机拍摄图像的最左上角像素为坐标原点,图像上水平向右为x轴正向,图像上垂直向下为y轴正向。
7.堆场中轴向水平存放的圆筒件的摆放角度与y轴的夹角为[0
°
,5
°
]之间的任一角度。
[0008]
预先储存堆场中存放的圆筒件的信息,包括圆筒件个体信息、圆筒件类公共信息;圆筒件个体信息包括每个存放在堆场的圆筒件的编码、与编码对应的圆筒件存放的货位位置;圆筒件类公共信息用于存储某类圆筒件实际的高度d、某类圆筒件的二值化图像中d对应的像素数d、某类圆筒件的底面外圆半径r;在获取某类圆筒件的二值化图像时,设分辨率为p
x
×
p
y
的工业相机拍摄图像的最左上角像素为坐标原点,图像上水平向右为x轴正向,图像上垂直向下为y轴正向,某类圆筒件的个体呈轴向水平摆放,其轴向与y轴方向一致,保持工业相机拍摄图像的中心与某类圆筒件的个体的中心在xoy平面上的投影重合,工业相机与某类圆筒件的个体的高度差为h,h保证p
x
代表的实际长度小于4r,同时大于2r,图像采集后,二值化,进而统计获得d。
[0009]
具体包括如下步骤:a.当需要对某个编码的目标圆筒件进行定位时,首先获取与编码对应的圆筒件存放的货位位置,驱动起重机的大车、小车,使得抓钩移动至货位位置。
[0010]
b.下探抓钩,使得抓钩的工业相机与目标圆筒件的高度差为h。
[0011]
c.启动抓钩的工业相机进行图像采集。
[0012]
d.对采集到的图像二值化。
[0013]
e.对二值化图像,从上往下,逐行扫描统计黑白像素比,当第i
‑
1行的黑白像素数量比与第i行的黑白像素数量比不同,而第i+1行的黑白像素数量比与第i行的黑白像素数量比相同,认为第i行为临界像素行,找到在第i
‑
1行以上,表示目标圆筒件的上底面在图像上投影的边界的两个端点,分别记作a(x
a
,y
a
)、b(x
b
,y
b
)。
[0014]
f.计算得到目标圆筒件在图像上的中心坐标c(x
c
,y
c
),从而实现图像上目标圆筒件中心的定位,其中x
c
=(x
a
+x
b
)/2,y
c
=(y
a
+y
b
)/2+d/2。
[0015]
g.图像中心坐标为(p
x
/2,p
y
/2),计算c(x
c
,y
c
)与图像的中心坐标的像素数之差,表示为δx=p
x
/2
‑
x
c
、δy=p
y
/2
‑
y
c
,再根据每个像素代表的实际距离,计算出抓钩与目标圆筒件中心在xoy平面上的实际距离,进而移动起重机的大车、小车,从而使抓钩的工业相机对准目标圆筒件的中心。
[0016]
进一步地,步骤d中,在对图像进行二值化时,首先进行灰度化处理,再进行二值化处理。
[0017]
进一步地,进行灰度化处理时,记采集的图像中的每个像素的r、g、b三个颜色通道的值为v
r
、v
g
、v
b
,使用加权平均值法或最大值法或gamma校正法或平均值法进行灰度化处理。
[0018]
使用加权平均值法时,设定r、g、b三个颜色通道的加权系数分别为w
r
、w
g
、w
b
,则灰度化后的每个像素的灰度值gray=v
r
×
w
r
+v
g
×
w
g
+v
b
×
w
b
。
[0019]
使用最大值法时,灰度化后的每个像素的灰度值gray为该像素的v
r
、v
g
、v
b
中的最大值。
[0020]
使用gamma校正法时,灰度化后的每个像素的灰度值gray=((v
r2.2
+(1.5v
g
)
2.2
+(0.6v
b
)
2.2
)/(1+1.5
2.2
+0.6
2.2
))^(5/11)。
[0021]
使用平均值法时,灰度化后的每个像素的灰度值gray=(v
r
+v
g
+v
b
)/3。
[0022]
进一步地,使用加权平均值法时,w
r
=0.3、w
g
=0.59、w
b
=0.11。
[0023]
进一步地,进行灰度化处理后,使用直方图双峰法进行二值化;对灰度化后的图像进行统计,得到灰度值分布直方图,在灰度值分布直方图的两个峰之间选择分隔阈值,将大于等于分隔阈值的灰度值置为255,将小于分割阈值的灰度值置为0,从而完成二值化。
[0024]
进一步地,在步骤e中,寻找表示目标圆筒件的上底面在图像上投影的边界的两个端点的方法为如下方法中的一种:e1. 从第i
‑
1行向上,逐行按从左至右的规律对像素进行判定,当遇到第一个灰度更替的像素时,记该像素为a(x
a
,y
a
),作为一个端点,结束本行的判定,之后的判定区域为以p
x
/2为分界,相对于x
a
所在一侧的另一侧,对上一行的像素继续进行从左至右的判定,如果没有符合条件的像素,对判定区域内再上一行的像素,进行判定,当再次遇到第一个灰度更替的像素,记该点为b(x
b
,y
b
),作为另一个端点;e2. 从第i
‑
1行向上,逐行从中间像素向左右两侧寻找离该行中间像素最近的第一个灰度更替的像素,记为a
(x
a
,y
a
),作为一个端点,同时判断x
a
与p
x
/2的大小关系,随后结束本行的判定,对上一行的像素开始判定,但判定的区域为以p
x
/2为分界,相对于x
a
所在一侧的另一侧,如果没有符合条件的像素,对再上一行的像素进行判定,当再次遇到第一个灰度更替的像素,记该点为b(x
b
,y
b
),作为另一个端点。
[0025]
进一步地,步骤g中,计算出抓钩与目标圆筒件中心在xoy平面上的实际距离时,抓钩与目标圆筒件中心在x轴上的实际距离为δx
×
(d/d),抓钩与目标圆筒件中心在y轴上的实际距离为δy
×
(d/d)。
[0026]
进一步地,抓钩中心还设有用于保证工业相机成像亮度的嵌有照明灯的环。
[0027]
一种抓钩挂钩方法,还预先获取目标圆筒件的底面内圆半径r,在抓钩的工业相机对准目标圆筒件的中心后,驱动抓钩张开d/2的距离,然后降下抓钩,抓钩下降高度为h+(r
‑
r),最后将抓钩重新收缩至夹紧目标圆筒件,即完成对目标圆筒件的抓钩挂钩动作。
[0028]
当夹角为5
°
时,圆筒件投影到y轴的长度为0.996倍,属于可以接受的误差范围内,例如10
°
时,圆筒件投影到y轴的长度变为实际长度的0.985倍,而当角度更大时,20
°
时,投影到y轴的长度只有0.94倍,当30
°
时,只有0.866倍,误差较大。因此限定圆筒件的摆放角度为与y轴呈[0
°
,5
°
],从而保证计算c(x
c
,y
c
)的坐标时,在加上d/2之后,抓钩中心,即相机与圆筒件的中心在xoy平面上的投影不会出现较大偏差。
[0029]
实际使用过程中,通过人工或自动将大车、小车移动至目标圆筒件附近,使工业相机的中心大致位于目标圆筒件处,然后通过本发明公开的定位方法,可以代替人工进行微调,实现更为精确的定位。
[0030]
与现有技术相比,本发明的有益效果是:对二值化图像自上而下,逐行扫描统计黑白像素比,找到第一个黑白像素数量比从变化到不变的临界像素行,从而确定目标圆筒件的一端在图像上的边界,其属于统计确定轮廓边界的方法,相比较传统的将图像与模板进行比对找出轮廓,由于无需计算比对,其执行效率会有明显提升。从实际使用效果来说,其可避免人工操作带来的定位不准以及由此带来的物品刮蹭划伤的问题,降低了作业成本,提高了起重机的吊装效率与经济效益。
附图说明
[0031]
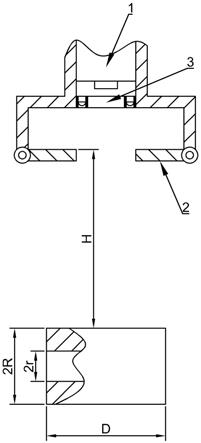
图1:堆场起重机抓钩、目标圆筒件的尺寸位置示意图。
[0032]
图2:实施例1中灰度化后的图像。
[0033]
图3:实施例1中二值化后的图像。
[0034]
图中:1.工业相机、2.抓钩、3.嵌有照明灯的环。
具体实施方式
[0035]
对本发明进行解释说明,但并非对本发明的限制,在本发明的思路启示下得到的技术方案,均应纳入本专利的保护范畴。
[0036]
实施例1如图1
‑
图3所示。
[0037]
一种堆场圆筒件定位方法,用于堆场起重机找到堆场中存放的目标圆筒件的中心,从而进行定位。
[0038]
起重机的小车上,设有可垂直移动的抓钩2,抓钩2中心安装有分辨率为p
x
×
p
y
的工业相机1,规定工业相机1拍摄图像的最左上角像素为坐标原点,图像上水平向右为x轴正向,图像上垂直向下为y轴正向。
[0039]
堆场中轴向水平存放的圆筒件的摆放角度与y轴的夹角为[0
°
,5
°
]之间的任一角度。
[0040]
预先储存堆场中存放的圆筒件的信息,包括圆筒件个体信息、圆筒件类公共信息;圆筒件个体信息包括每个存放在堆场的圆筒件的编码、与编码对应的圆筒件存放的货位位置;圆筒件类公共信息用于存储某类圆筒件实际的高度d(本实施例中,d=15.6cm)、某类圆筒件的二值化图像中d对应的像素数d(本实施例中d=780)、某类圆筒件的底面外圆半径r(本实施例中r=5.5cm);在获取某类圆筒件的二值化图像时,设分辨率为p
x
×
p
y
(本实施例中p
x
=1080,p
y
=1056)的工业相机1拍摄图像的最左上角像素为坐标原点,图像上水平向右为x轴正向,图像上垂直向下为y轴正向,某类圆筒件的个体呈轴向水平摆放,其轴向与y轴方向一致,保持工业相机1拍摄图像的中心与某类圆筒件的个体的中心在xoy平面上的投影重合,工业相机1与某类圆筒件的个体的高度差为h(本实施例中h=22cm),h保证p
x
代表的实际长度小于4r,同时大于2r,图像采集后,二值化,进而统计获得d。
[0041]
具体包括如下步骤:a.当需要对某个编码的目标圆筒件进行定位时,首先获取与编码对应的圆筒件存放的货位位置,驱动起重机的大车、小车,使得抓钩2移动至货位位置。
[0042]
b.下探抓钩2,使得抓钩2的工业相机1与目标圆筒件的高度差为h。
[0043]
c.启动抓钩2的工业相机1进行图像采集。
[0044]
d.对采集到的图像二值化。在对图像进行二值化时,首先进行灰度化处理,再进行二值化处理;进行灰度化处理时,记采集的图像中的每个像素的r、g、b三个颜色通道的值为v
r
、v
g
、v
b
,使用加权平均值法或最大值法或gamma校正法或平均值法进行灰度化处理:使用加权平均值法时,设定r、g、b三个颜色通道的加权系数分别为w
r
、w
g
、w
b
,则灰度化后的每个像素的灰度值gray=v
r
×
w
r
+v
g
×
w
g
+v
b
×
w
b
,进一步地,使用加权平均值法时,w
r
=0.3、w
g
=0.59、w
b
=0.11;使用最大值法时,灰度化后的每个像素的灰度值gray为该像素的v
r
、v
g
、v
b
中的最大值;使用gamma校正法时,灰度化后的每个像素的灰度值gray=((v
r2.2
+(1.5v
g
)
2.2
+(0.6v
b
)
2.2
)/(1+1.5
2.2
+0.6
2.2
))^(5/11);使用平均值法时,灰度化后的每个像素的灰度值gray=(v
r
+v
g
+v
b
)/3。本实施例中,使用加权平均值法进行处理,本领域技术人员可以根据需要灵活调整灰度化处理的方法。进一步地,进行灰度化处理后,使用直方图双峰法进行二值化;对灰度化后的图像进行统计,得到灰度值分布直方图,在灰度值分布直方图的两个峰之间选择分隔阈值,将大于等于分隔阈值的灰度值置为255,将小于分割阈值的灰度值置为0,从而完成二值化,本实施例中,阈值选择127。
[0045]
e.对二值化图像,从上往下,逐行扫描统计黑白像素比,当第i
‑
1行的黑白像素数量比与第i行的黑白像素数量比不同,而第i+1行的黑白像素数量比与第i行的黑白像素数量比相同,认为第i行为临界像素行,找到在第i
‑
1行以上,表示目标圆筒件的上底面在图像上投影的边界的两个端点,分别记作a(x
a
,y
a
)、b(x
b
,y
b
)。
[0046]
进一步地,在步骤e中,寻找表示目标圆筒件的上底面在图像上投影的边界的两个端点的方法为如下方法中的一种:
e1.从第i
‑
1行向上,逐行按从左至右的规律对像素进行判定,当遇到第一个灰度更替的像素时,记该像素为a(x
a
,y
a
),作为一个端点,结束本行的判定,之后的判定区域为以p
x
/2为分界,相对于x
a
所在一侧的另一侧,对上一行的像素继续进行从左至右的判定,如果没有符合条件的像素,对判定区域内再上一行的像素,进行判定,当再次遇到第一个灰度更替的像素,记该点为b(x
b
,y
b
),作为另一个端点;e2.从第i
‑
1行向上,逐行从中间像素向左右两侧寻找离该行中间像素最近的第一个灰度更替的像素,记为a(x
a
,y
a
),作为一个端点,同时判断x
a
与p
x
/2的大小关系,随后结束本行的判定,对上一行的像素开始判定,但判定的区域为以p
x
/2为分界,相对于x
a
所在一侧的另一侧,如果没有符合条件的像素,对再上一行的像素进行判定,当再次遇到第一个灰度更替的像素,记该点为b(x
b
,y
b
),作为另一个端点。
[0047]
本实施例中,临界像素行为从上至下第120行,使用方法e1,寻找到的a(x
a
,y
a
)为(813,119),b(x
b
,y
b
)为(263,108)。
[0048]
f.计算得到目标圆筒件在图像上的中心坐标c(x
c
,y
c
),从而实现图像上目标圆筒件中心的定位,其中x
c
=(x
a
+x
b
)/2,y
c
=(y
a
+y
b
)/2+d/2,c为(538,503.5),因为c并非代表实际像素,只是计算的需要,因此503.5无需圆整。
[0049]
g.图像中心坐标为(p
x
/2,p
y
/2),计算c(x
c
,y
c
)与图像的中心坐标的像素数之差,表示为δx=p
x
/2
‑
x
c
=2、δy=p
y
/2
‑
y
c
=24.5,再根据每个像素代表的实际距离,计算出抓钩2与目标圆筒件中心在xoy平面上的实际距离,进而移动起重机的大车、小车,从而使抓钩2的工业相机1对准目标圆筒件的中心。
[0050]
进一步地,步骤g中,计算出抓钩2与目标圆筒件中心在xoy平面上的实际距离时,抓钩2与目标圆筒件中心在x轴上的实际距离为δx
×
(d/d)=0.04cm,抓钩2与目标圆筒件中心在y轴上的实际距离为δy
×
(d/d)=0.49cm。
[0051]
进一步地,抓钩2中心还设有用于保证工业相机1成像亮度的嵌有照明灯的环3。
[0052]
一种抓钩挂钩方法,还预先获取目标圆筒件的底面内圆半径r=2.5cm,在抓钩2的工业相机1对准目标圆筒件的中心后,驱动抓钩2张开d/2=7.8cm的距离,并将降下抓钩2,抓钩2下降高度为h+(r
‑
r)=25cm,最后将抓钩2重新收缩至夹紧目标圆筒件,即完成对目标圆筒件的抓钩挂钩动作。