基于倾斜摄影数据和LIDAR点云融合自动单体化建模的方法与流程
基于倾斜摄影数据和lidar点云融合自动单体化建模的方法
1.技术领域:本发明涉及一种单体化建模方法,特别涉及到一种基于倾斜摄影数据和lidar点云融合自动单体化建模的方法。
2.
背景技术:
单体化是相对于倾斜摄影数据特点而言的,指的是我们想要单独管理的一个个对 象,且是可以被选中的实体;即用鼠标点击独立的一个对象时可以高亮显示,可以附上属性 信息。只有具备了单体化的能力,数据才可以被管理使用,而不仅仅是被用来浏览查看。对 于人工建模而言,如3dmax建的模型,单体化是一件很容易实现的事情。即在人工建模的过 程中,自然会把需要单独管理的对象制作为单独的模型,与其它对象分离开。
3.对于倾斜摄影数据而言,它是连续的一张“皮”,所有地物都是连续的整体,不是分 隔开来的。其建模机制在于首先从所拍摄的影像像对中生成稠密的点云,然后对点云进行 抽稀,再构建三角网,最后贴上贴图。在这个过程中,是没有人工干预的。当前的建模算法并 不会把建筑、地面、树木等地物区分出来,因此构建出来的是一个连续的tin网。对于这样的 数据,本身是无法选中单个建筑的,需要进行一定的中间处理才能实现单体化。而对于大多 数实际应用而言,是需要能对建筑等地物进行单独的选中、赋予属性、查询属性等基本的 gis操作。因此,单体化成为倾斜摄影模型在gis应用中绕不过的一个坎,是必须要解决的问 题。
4.目前,倾斜摄影数据单体化有3种解决思路。第一种最直观的思路,就是用建筑物、 道路、树木等对应的矢量面,对倾斜摄影模型进行切割,即把连续的三角面片网从物理上分 割开,从而实现单体化。我们可以称之为“切割单体化”。第二种利用三角面片中每个顶点额 外的存储空间,把对应的矢量面的id值存储起来;即一个建筑所对应的三角面片的所有顶 点,都存储了同一个id值,从而实现在鼠标选中这个建筑时,通过判断id值,将该建筑物呈 现出高亮的效果,这个可以称之为“id单体化”。第三种是在三维渲染的时候,动态的把对应 的矢量面叠加到倾斜摄影模型上,通过间接的方式,矢量面范围内的建筑等物体高亮显示, 从而实现可被单独选中的效果,这种由于是渲染时动态呈现的,可以称之为“动态单体化”。
5.本发明提出的单体化算法属于动态单体化范畴。目前传统的建筑物矢量底面的获 取是通过已有dlg数据进行配准,此方法是最省事的,不过需要有数据基础。还有一种是通 过对正射影像进行人工的矢量化方式来获取。自动化提取现在是一种新兴的获取方式,代表着未来的方向。
6.在倾斜摄影过程中离不开无人机的长时间运行,在进行大面积的倾斜摄影时,无人机的续航就成了问题,现有技术在特定的高处设置有供无人机充电续航的基站,但存在开放式的结构使得基站内部容易受到外界杂物如垃圾、羽毛等干扰,影响充电效果甚至与影响无人机的飞行安全。
技术实现要素:
7.本发明的目的在于克服现有技术的不足之处,提供一种基于倾斜摄影数据和和
lidar点云融合自动单体化建模的方法。
8.基于倾斜摄影数据和lidar点云融合自动单体化建模的方法,其特征在于,包括以下步骤:s1、使用无人机和基站利用倾斜摄影测量技术获取监测区域的三维模型,得到三维模型数据;s2、使用机载lidar与三维激光扫描仪获取监测区域的点云数据;s3、对监测区域的点云数据和三维模型数据进行自动单体化建模。
9.其中,所述自动单体化建模方法包括以下子步骤:s31对所述点云数据和三维建模数据进行预处理,剔除无效点,得到三维点云数据;s32将三维点云数据映射到二维平面;s33根据三维点云数据范围建立相应的平面网格,对三维点云数据平面网格进行快速遍历,计算每个网格的点密度,根据网格的点密度确定网格是否在轮廓线上;s34从平面网格里提取出建筑物轮廓线;s35结合gpu的可编程渲染管线,实现将轮廓线范围内的建筑物高亮显示。
10.其中,所述步骤s1中的基站装置包括底座、伞架装置、圆杆、充电装置和驱动装置,所述底座为圆形凹台,所述伞架装置包括伞骨、伞布、内支杆和锥形套,所述伞骨从上到下以此为第一伞骨、第二伞骨和第三伞骨,所述第三伞骨周向铰接在底座的边沿,所述第三伞骨和第二伞骨通过第一转动副铰接在一起,所述第二伞骨和第一伞骨通过第二转动副铰接在一起,所述第一伞骨的另一端铰接在上下贯通且大直径开口端向上的锥形套上,所述伞布设置在伞骨上,所述圆杆为中空杆,所述充电装置设置在圆杆内,所述充电装置包括充电端子,所述充电端子伸出圆杆,所述充电端子可采用现有技术中的金属充电极,所述圆杆设置在底座的中心,所述滑套和圆杆为可相对移动的联接,所述滑套和第二转动副之间铰接有内支杆,所述驱动装置设置在底座上。
11.其中,所述第一伞骨在第二转动副的作用下最多旋转到平行与水平面。
12.其中,所述步骤s1中的无人机具有差分定位功能,所述无人机设置有用于充电的导电杆条。
13.其中,所述驱动装置为丝杆驱动驱动滑套上下移动,所述滑套和所述驱动装置的丝杆滑动连接。
14.本发明的有益效果在于:通过公开的单体化建模方法,实现了对倾斜摄影数据和lidar点云数据单体化过程中对目标物矢量底面的自动提取,获取速度,降低了人力成本;通过基站的伞架装置实现了在非充电时间对于基站的保护,实现了在充电时对无人机的保护,从而提高了无人机的续航效果和保障了无人机的飞行安全,从而提高单体化建模的稳定性。
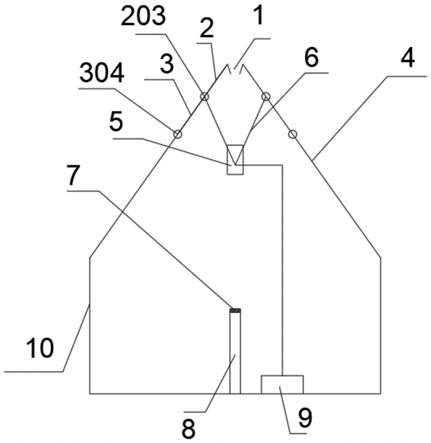
15.附图说明:图1是本发明的结构示意图图2是本发明的充电状态结构示意图,图3是本发明的伞架结构示意图,其中,1、锥形套;2、第一伞骨;3、第二伞骨;4、第三伞骨;5、滑套;6、内支杆;7、充电
端子;8、圆杆;9、驱动装置;10、底座;11、伞布。
具体实施方式
16.基于倾斜摄影数据和和lidar点云融合自动单体化建模的方法,其特征在于,包括以下步骤:s1、使用无人机和基站利用倾斜摄影测量技术获取监测区域的三维模型,得到三维模型数据;s2、使用机载lidar与三维激光扫描仪获取监测区域的点云数据;s3、对监测区域的点云数据和三维模型数据进行自动单体化建模。
17.其中,所述自动单体化建模方法包括以下子步骤:s31对所述点云数据和三维建模数据进行预处理,剔除无效点,得到三维点云数据;s32将三维点云数据映射到二维平面;s33根据三维点云数据范围建立相应的平面网格,对三维点云数据平面网格进行快速遍历,计算每个网格的点密度,根据网格的点密度确定网格是否在轮廓线上;s34从平面网格里提取出建筑物轮廓线;s35结合gpu的可编程渲染管线,实现将轮廓线范围内的建筑物高亮显示。
18.其中,所述步骤s1中的基站装置包括底座、伞架装置、圆杆、充电装置和驱动装置,所述底座为圆形凹台,所述伞架装置包括伞骨、伞布、内支杆和锥形套,所述伞骨从上到下以此为第一伞骨、第二伞骨和第三伞骨,所述第三伞骨周向铰接在底座的边沿,所述第三伞骨和第二伞骨通过第一转动副铰接在一起,所述第二伞骨和第一伞骨通过第二转动副铰接在一起,所述第一伞骨的另一端铰接在上下贯通且大直径开口端向上的锥形套上,所述伞布设置在伞骨上,所述圆杆为中空杆,所述充电装置设置在圆杆内,所述充电装置包括充电端子,所述充电端子伸出圆杆,所述充电端子可采用现有技术中的金属充电极,所述圆杆设置在底座的中心,所述滑套和圆杆为可相对移动的联接,所述滑套和第二转动副之间铰接有内支杆,所述驱动装置设置在底座上。
19.其中,所述第一伞骨在第二转动副的作用下最多旋转到平行与水平面。
20.其中,所述步骤s1中的无人机具有差分定位功能,所述无人机设置有用于充电的导电杆条。
21.其中,所述驱动装置为丝杆驱动驱动滑套上下移动,所述滑套和所述驱动装置的丝杆滑动连接。
22.工作原理:首先,无人机需利用自身携带的差分定位功能,作业返回时停留至如图1所示的基站上方,无人机底部的导电杆条由上至下缓慢插入至锥形套1内,无人机停止运行,在重力的作用下,第一伞骨2、第二伞骨3和第三伞骨4沿着自身转动副旋转,从而驱动内支杆6使滑套5沿丝杆向下移动,直到导电杆条与滑杆上的充电端子7接触,充电端子7提供直流电,导电杆条将直流电经过全桥整流为无人机内部电路供电,充电过程基站的状态参阅图2,第一伞骨2在第二转动副203的作用下,平行于水平面,无人机被安置在第一伞骨2和第二伞骨3之间的伞布11之间,第一转动副304在上方彼此靠拢,第三伞骨4上设置的伞布11再次将基站的上表面覆盖起来,起到了很好的保护效果,充电完成后,驱动装置10驱动滑套
5向上移动,带动内支杆相应运动动,在内支杆6的作用下,第一伞骨2、第二伞骨3和第三伞骨4沿着自身转动副旋转,直到基站恢复至一开始的状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1