基于数据驱动和机理模型融合的车载飞轮动态建模方法
1.本发明涉及磁悬浮电机的技术领域,尤其涉及一种基于数据驱动和机理模型融合的车载飞轮动态建模方法。
背景技术:
2.近年来兴起的磁悬浮无轴承电机结合了磁轴承与开关磁阻电机的双重优点,可简化系统结构,提高临界转速与可靠性,将其用于飞轮领域,形成具备独特优势的磁悬浮飞轮电机,得到国内外学者广泛研究,相继出现径向分相、轴向分相等结构,其中轴向分相结构在实现电动/发电功能的同时,不额外增设磁轴承,仅用轴向分布的两套悬浮绕组即可实现径向四自由度悬浮,从而大幅提高系统集成度和临界转速,十分适合飞轮储能悬浮支承及能量的转化系统。
3.新型磁悬浮支承技术迅速发展,其作为高性能的支承技术,在航空、能源、国防、电力、空间科学等方面都有着重要的应用价值。其所支承的旋转系统向高转速、高精度和柔性化等方向发展,使磁悬浮支承系统结构动态特性的分析成为其研制过程中极为重要的环节。对磁轴承转子系统动态特性的研究,特别是结构系统的模态参数,包括模态频率、模态振型和阻尼,是磁轴承转子系统结构稳定性的关键。
4.车载飞轮电池是安装并工作于运动车身上的磁悬浮储能飞轮,汽车不同的行驶状态以及路面的不平整引起的汽车各向振动,都将会对飞轮转子的稳定运行产生影响。现有技术中没有完善的车载飞轮模型,不能及时检测其运行状态从而保证系统的稳定性。
技术实现要素:
5.发明目的:针对上述现有技术的不足,本发明的目的在于提供一种基于数据驱动和机理模型融合的车载飞轮动态建模方法,基于机理模型和数据驱动相结合的方法,采用极限学习机算法训练样本数据,对飞轮系统悬浮力、平均路面功率、加速比例、减速比例、匀速比例、怠速比例、平均速度、平均行驶速度、最大速度、最小速度、最大加速度、最大减速度、速度标准偏差、加速度标准偏差、累积行驶距离、平均加速度、平均减速度进行训练,建立极限学习机模型,有利于识别道路工况,提高了输出道路工况的准确性。
6.技术方案:为实现上述技术目的,本发明采用以下技术方案。
7.一种基于数据驱动和机理模型融合的车载飞轮动态建模方法,包括以下步骤:
8.s1、在线模型中,通过磁悬浮飞轮转子系统运动方程,计算磁悬浮飞轮转子系统输入和输出之间的传递函数矩阵;
9.s2、根据步骤s1中的传递函数矩阵计算频响传递函数矩阵,根据步骤s1中的传递函数矩阵获取留数矩阵,在频域内计算留数矩阵与无阻尼固有频率、模态阻尼比之间的关系,以及留数矩阵与模态振型矩阵之间的关系;
10.s3、根据步骤s2得到的频响传递函数矩阵,留数矩阵与无阻尼固有频率、模态阻尼比之间的关系,以及留数矩阵与模态振型矩阵之间的关系,通过最小二乘复频域方法求解
频响传递函数矩阵与模态振型矩阵之间的关系,进而识别模态参数;
11.s4、在离线模型中,构建磁悬浮飞轮转子系统的机理模型,将离线模型和在线模型相结合,获取样本数据,基于数据驱动和机理模型融合,构建极限学习机模型,所述极限学习机模型用于识别道路工况。
12.优选地,所述步骤s1的具体过程为:
13.s11、计算磁悬浮飞轮转子系统运动方程,其中运动方程的输入为磁悬浮飞轮转子系统的n维加速度、速度和位移响应向量,输出为磁悬浮飞轮转子系统的n维振动力向量;
14.s12、对步骤s11中的磁悬浮飞轮转子系统运动方程进行拉普拉斯变换;
15.s13、计算磁悬浮飞轮转子系统输入和输出之间的传递函数矩阵。
16.优选地,所述步骤s1中的公式计算具体过程为:
17.s11、计算磁悬浮飞轮转子系统运动方程:
[0018][0019]
其中,[m]为质量矩阵,m∈r
n
×
n
,[c]是阻尼矩阵,c∈r
n
×
n
,[k]是刚度矩阵,k∈r
n
×
n
,x分别为磁悬浮飞轮转子系统输入的n维加速度、速度和位移响应向量,f(t)为磁悬浮飞轮转子系统输出的n维振动力向量;
[0020]
s12、对步骤s11中的磁悬浮飞轮转子系统运动方程进行拉普拉斯变换:
[0021]
([m]s2+[c]s+[k]){x(s)}={f(s)}
[0022]
其中,x(s)、f(s)为拉普拉斯变换后的公式,其中,x(s)、f(s)为拉普拉斯变换后的公式,
[0023]
s13、计算传递函数矩阵:令[v(s)]=([m]s2+[c]s+[k]),得:
[0024]
[v(s)]{x(s)}={f(s)}
[0025]
[h(s)]=[v(s)]
‑1=([m]s2+[c]s+[k])
‑1[0026]
其中,[v(s)]是广义阻抗矩阵,反应磁悬浮飞轮转子系统动态特性,传递函数矩阵[h(s)]可表示为:
[0027][0028]
其中,a
ij
([v(s)])为广义阻抗矩阵的伴随矩阵,|v(s)|为广义阻抗矩阵的行列式。
[0029]
优选地,所述步骤s2的具体过程为:
[0030]
s21、根据傅里叶变换,将传递函数矩阵转化成频响传递函数矩阵,推导出磁悬浮飞轮转子系统频域内输出和输入关系;
[0031]
s22、计算步骤s1中获取的传递函数矩阵的特征方程,解出其特征根,所述特征根是关于无阻尼固有频率、模态阻尼比的表达式;
[0032]
s23、结合步骤s21中计算的特征方程和特征根,计算传递函数矩阵的留数矩阵,获取留数矩阵与无阻尼固有频率、模态阻尼比之间的关系;
[0033]
s24、根据磁悬浮飞轮转子系统的模态振型向量,获取留数矩阵与模态振型矩阵之
间的关系。
[0034]
优选地,所述步骤s2的公式计算具体过程为:
[0035]
s21、在拉普拉斯公式中,令s=jω,根据傅里叶变换,将传递函数矩阵转化成频响传递函数矩阵,推导出磁悬浮飞轮转子系统频域内输出和输入关系;
[0036]
{x(ω)}=[h(ω)]{f(ω)}
[0037]
[h(ω)]=[v(ω)]={[k]
‑
ω2[m]+[c](jω)}
‑1[0038]
其中,[h(ω)]是磁悬浮飞轮转子系统的频响传递函数矩阵,x(ω)、f(ω)分别为磁悬浮飞轮转子系统频域内的输入和输出;
[0039]
s22、计算步骤s1中获取的传递函数矩阵的特征方程,解出其特征根,所述特征根是关于无阻尼固有频率、模态阻尼比的表达式;
[0040][0041][0042][0043]
其中,[h(s)]为步骤s1中计算的传递函数矩阵,a
ij
为[v(ω)]矩阵非对角元素,β
r
和α
r
是特征方程的一对共轭复数根,特征根β
r
和α
r
是实部σ
r
的阻尼因子,δ
r
表示阻尼固有频率;σ
r
=
‑
ε
r
ω
r
,ω
r
是第r阶无阻尼固有频率,ε
r
是第r阶模态阻尼比;
[0044]
s23、结合步骤s21中计算的特征方程和特征根,计算传递函数矩阵的留数矩阵,获取留数矩阵与无阻尼固有频率、模态阻尼比之间的关系;
[0045][0046]
[j]
r
=(s
‑
β
r
)[h(s)]
[0047]
其中,[j]
r
和[j
*
]
r
是特征方程的留数矩阵,结合s21和s22中的公式进而获取留数矩阵与无阻尼固有频率、模态阻尼比之间的关系;
[0048]
s24、根据磁悬浮飞轮转子系统的模态振型向量,获取留数矩阵与模态振型矩阵之间的关系:
[0049]
留数矩阵与磁悬浮飞轮转子系统的模态振型向量之间的关系:
[0050]
[j]
r
=q
r
{φ
r
}{φ
r
}
t
[0051]
[j
*
]
r
=q
r*
{φ
r*
}{φ
r*
}
t
[0052]
其中,q
r
、q
r*
分别是模态比例因子,{φ
r
}、{φ
r*
}分别是模态振型向量,磁悬浮飞轮转子系统所有的模态振型向量之间组成一个大矩阵,即为模态振型矩阵:
[0053]
[φ]=[{φ1}
…
{φ
n
}{φ
1*
}
…
{φ
n*
}]
[0054]
其中,n为模态阶数,φ
n
为对应n阶模态振型向量。
[0055]
优选地,所述步骤s3的具体过程为:
[0056]
s31、获取模态振型矩阵的加权正交条件计算公式;
[0069]
其中,h
q
(ω)是理论频响函数矩阵的第q行,y
q
(ω)是分子多项式行向量;c
q
(ω)是分母多项式矩阵;
[0070]
根据频响传递函数矩阵[h(ω
x
)]取到不同频率的值,组成维数足够多的方程组,进而针对y
q
(ω)获取一个扩展友矩阵,计算扩展友矩阵的极点,得到模态参数中的有阻尼时的固有频率ω
di
、模态阻尼比ξ
i
:
[0071][0072]
s
i
s
i*
=δ
i
±
jω
di
[0073][0074]
其中,[v][λ]为针对y
q
(ω)获取的一个扩展友矩阵,s
i
、s
i*
为扩展友矩阵的极点,ω
di
是有阻尼固有频率,ξ
i
模为态阻尼比;
[0075]
在线模型中根据磁悬浮飞轮转子系统实际的输入输出值得到实测的频响传递函数矩阵,进而计算模态参数中的模态振型矩阵:
[0076][0077]
其中,{l}
ih
是模态参与因子行向量{l}
i
的共轭转置,{l}
i
代表磁悬浮飞轮转子系统中各个振点对相应模态的比例贡献,{φ}
i
是第i阶模态振型矩阵,{φ}
i*
为{φ}
i
的伴随向量,[lr]、[ur]分别是分析频带外模态影响的下残余项和上残余项矩阵。
[0078]
优选地,所述步骤s4的具体过程为:
[0079]
s41、在离线模型中,根据轴向分相磁悬浮飞轮转子构建磁悬浮飞轮转子系统的机理模型;
[0080]
s42、将离线模型和在线模型相结合,获取样本数据;所述样本数据包括在线模型中的信号值退化和失效数据以及离线模型中的悬浮力数据,其中,信号值退化和失效数据包括在线模型中传感器检测的应力信号和振动信号,悬浮力数据通过机理模型采样获取;
[0081]
s43、结合样本数据作为数据驱动,基于数据驱动和机理模型融合,构建极限学习机模型,所述极限学习机模型用于识别道路工况。
[0082]
优选地,所述步骤s4的公式计算具体过程为:
[0083]
s41、在离线模型中,根据轴向分相磁悬浮飞轮转子构建磁悬浮飞轮转子系统的机理模型:
[0084]
[0085]
其中,f
x
为悬浮力在x轴方向的分力,f
y
为悬浮力在y轴方向的分力,为悬浮力在y轴方向的分力,i
xp
为x轴方向上串联的两个悬浮绕组电流;i
yp
为y轴方向上串联的两个悬浮绕组电流;
[0086]
s42、将离线模型和在线模型相结合,获取样本数据;所述样本数据包括在线模型中的信号值退化和失效数据以及离线模型中的悬浮力数据,其中,信号值退化和失效数据包括在线模型中传感器检测的应力信号和振动信号,悬浮力数据通过机理模型采样获取;
[0087]
s43、结合样本数据作为数据驱动,基于数据驱动和机理模型融合,构建极限学习机模型,所述极限学习机模型用于识别道路工况,极限学习机模型为:
[0088][0089]
其中,x
i
∈r
r
为样本数据中的第i个输入向量,x
i
=[x
i1
,...,x
ir
]
t
,t
i
=[t
i1
,...,t
im
]
t
为对应x
i
的期望输出向量,期望输出向量为m维,设elm的隐含层节点个数为l,激活函数为g(.);a
l
=[α
l1
,...,α
lr
]
t
是输入层神经元到第l个隐含层神经元的权重向量,b
l
是第l个隐含层神经元的偏差,β
l
=[β
l1
,β
l2
,...,β
lm
]
t
是第l个隐含层神经元到输出层的权重向量;l=1,2,...,l,n为输入样本的总数。
[0090]
优选地,所述样本数据包括磁悬浮转子飞轮系统的悬浮力、平均路面功率、加速比例、减速比例、匀速比例、怠速比例、平均速度、平均行驶速度、最大速度、最小速度、最大加速度、最大减速度、速度标准偏差、加速度标准偏差、累积行驶距离、平均加速度、平均减速度。
[0091]
有益效果:本发明基于机理模型和数据驱动相结合的方法,采用极限学习机算法训练样本数据,对飞轮系统悬浮力、平均路面功率、加速比例、减速比例、匀速比例、怠速比例、平均速度、平均行驶速度、最大速度、最小速度、最大加速度、最大减速度、速度标准偏差、加速度标准偏差、累积行驶距离、平均加速度、平均减速度进行训练,建立极限学习机模型,有利于识别道路工况,提高了输出道路工况的准确性。
附图说明
[0092]
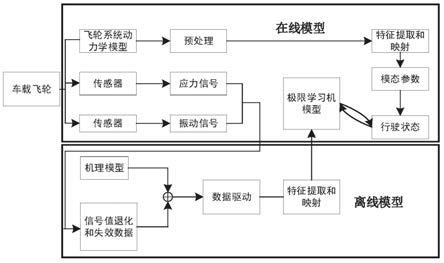
图1是本发明的结构示意图;
[0093]
图2是本发明的流程示意图;
[0094]
图3是实施例中轴向分相磁悬浮飞轮电机转子坐标系的示意图;
[0095]
图4是实施例中机械装配图剖面截面图;
[0096]
图5是实施例中极限学习机elm结构图。
具体实施方式
[0097]
为了加深对本发明的理解,下面将结合附图和实施例对本发明作进一步的说明。
[0098]
本发明所提出的一种基于数据驱动和机理模型融合的车载飞轮动态建模方法,如附图1和附图2所示,其具体步骤如下:
[0099]
s1、在线模型中,通过磁悬浮飞轮转子系统运动方程,计算磁悬浮飞轮转子系统输
入和输出之间的传递函数矩阵;
[0100]
s2、根据步骤s1中的传递函数矩阵计算频响传递函数矩阵,根据步骤s1中的传递函数矩阵获取留数矩阵,在频域内计算留数矩阵与无阻尼固有频率、模态阻尼比之间的关系,以及留数矩阵与模态振型矩阵之间的关系;
[0101]
s3、根据步骤s2得到的频响传递函数矩阵,留数矩阵与无阻尼固有频率、模态阻尼比之间的关系,以及留数矩阵与模态振型矩阵之间的关系,通过最小二乘复频域方法求解频响传递函数矩阵与模态振型矩阵之间的关系,进而识别模态参数;
[0102]
s4、在离线模型中,构建磁悬浮飞轮转子系统的机理模型,将离线模型和在线模型相结合,获取样本数据,基于数据驱动和机理模型融合,构建极限学习机模型,所述极限学习机模型用于识别道路工况。
[0103]
实施例
[0104]
在步骤一中,在线模型包括飞轮系统动力学模型、传感器、采集的应力信号和振点信号、特征提取和映射、模态参数模块、行驶状态和极限学习机模型;飞轮系统动力学模型中,磁悬浮飞轮系统运动方程表示为:
[0105][0106]
其中[m]是质量矩阵,m∈r
n
×
n
,[c]是阻尼矩阵,c∈r
n
×
n
,[k]是刚度矩阵,k∈r
n
×
n
,{x}分别为磁悬浮飞轮转子系统输入的n维加速度、速度和位移响应向量,对应于采集的应力信号;{f(t)}为磁悬浮飞轮转子系统输出的n维振动力向量,对应于采集的振动信号。
[0107]
磁悬浮飞轮转子系统初始状态为零,对式(1)进行拉普拉斯变换得:
[0108]
([m]s2+[c]s+[k]){x(s)}={f(s)}
ꢀꢀ
(2)
[0109]
其中,x(s)、f(s)为拉普拉斯变换后的公式,其中,x(s)、f(s)为拉普拉斯变换后的公式,
[0110]
令[v(s)]=([m]s2+[c]s+[k]),得:
[0111]
[v(s)]{x(s)}={f(s)}
ꢀꢀ
(3)其中,[v(s)]是广义阻抗矩阵,反应磁悬浮飞轮转子系统动态特性,其逆矩阵为:
[0112]
[h(s)]=[v(s)]
‑1=([m]s2+[c]s+[k])
‑1ꢀꢀ
(4)
[0113]
[h(s)]为传递函数矩阵。由线性可知,矩阵的逆矩阵可通过伴随矩阵算出,[h(s)]可表示为:
[0114][0115]
其中,a
ij
([v(s)])为广义阻抗矩阵的伴随矩阵,|v(s)|为广义阻抗矩阵的行列式。
[0116]
步骤二中,由式(2)可得:
[0117]
{x(s)}=[h(s)]{f(s)}
ꢀꢀ
(6)
[0118]
令s=jω。根据傅里叶变换,将传递函数矩阵转化成频响函数矩阵,推导出磁悬浮飞轮转子系统频域内输出和输入关系式:
[0119]
[v(ω)]=[m](jω)2+[c](jω)+[k]=[k]
‑
ω2[m]+jω[c]
ꢀꢀ
(7)
[0120]
[h(ω)]=[v(ω)]
‑1={[k]
‑
ω2[m]+[c](jω)}
‑1ꢀꢀ
(8)
[0121]
{x(ω)}=[h(ω)]{f(ω)}
ꢀꢀ
(9)
[0122]
其中,[h(ω)]是磁悬浮飞轮转子系统的频响函数矩阵,x(ω)、f(ω)分别为磁悬浮飞轮转子系统频域内的输入和输出。
[0123]
式(5)中的分母,为磁悬浮飞轮转子系统的特征方程。由此可以求出系统特征方程的根,[h(s)]可以化简成特征根表示:
[0124][0125]
其中,a
ij
为[v(ω)]矩阵非对角元素,[v(ω)]=([m](jω)2+[c]jω+[k]),β
r
和α
r
是特征方程的一对共轭复数根,[j]
r
和[j
*
]
r
是传递函数矩阵的留数矩阵。特征根β
r
和α
r
是实部σ
r
的阻尼因子,δ
r
表示阻尼固有频率,特征根可表示为:
[0126][0127][0128]
式中:σ
r
=
‑
ε
r
ω
r
,ω
r
是第r阶无阻尼固有频率,ε
r
是第r阶模态阻尼比。根据留数定理,这些留数之间的关系为:
[0129]
[j]
r
=(s
‑
β
r
)[h(s)]
ꢀꢀ
(13)
[0130]
公式(13)结合公式(10)至公式(12)可以得到留数矩阵和第r阶无阻尼固有频率、第r阶模态阻尼比之间的关系。
[0131]
留数矩阵与磁悬浮飞轮转子系统的模态振型向量之间的关系式为:
[0132]
[j]
r
=q
r
{φ
r
}{φ
r
}
t
ꢀꢀ
(14)
[0133]
[j
*
]
r
=q
r*
{φ
r*
}{φ
r*
}
t
ꢀꢀ
(15)
[0134]
其中,q
r
,q
r*
是模态比例因子,{φ
r
}、{φ
r*
}分别是模态振型向量。磁悬浮飞轮转子系统所有的模态向量之间组成一个大矩阵,即为振型矩阵:
[0135]
[φ]=[{φ1}
…
{φ
n
}{φ1*}
…
{φ
n
*}]
ꢀꢀ
(16)
[0136]
其中,n为模态阶数,为对应n阶模态振型向量。
[0137]
步骤三中,采用最小二乘复频域方法获取频响传递函数矩阵与模态振型矩阵之间的关系:
[0138]
根据模态振型矩阵的加权正交条件,可表示为:
[0139]
[0140][0141]
其中,{φ
q
}、{φ
r
}是q、r阶特征向量,m
r
、k
r
分别表示磁悬浮飞轮转子系统第r阶模态的质量和刚度,[m]是质量矩阵,m∈r
n
×
n
,[k]是刚度矩阵,k∈r
n
×
n
。
[0142]
设矩阵[c]可由振型矩阵[φ]对角化,则阻抗矩阵可转变为:
[0143][0144]
其中,令z
r
=(k
r
‑
ω2m
r
)+jωc
r
,c
r
是磁悬浮飞轮转子系统第r阶模态阻尼,[c]是阻尼矩阵,c∈r
n
×
n
。[h(ω)]的表达式为:
[0145][0146]
在[h(ω)]矩阵的第i行第j列的元素是:
[0147][0148]
其中,x
i
(ω)为在频域内矩阵的第i行,f
j
(ω)为在频域内矩阵的第j列,是第r阶模态频率,ω为固有频率,是第r阶模态阻尼比,{φ
r
}第r阶模态振型。通过求取系统频响函数矩阵的一行或一列来获得全部模态参数ω
r
、ε
r
、{φ
r
}。
[0149]
结合公式(21),最小二乘复频域法的系统的输出信号和输入信号之间的关系为:
[0150]
[h
q
(ω)]=[y
q
(ω)][c
q
(ω)]
‑1ꢀꢀ
(22)
[0151]
其中,h
q
(ω)是理论频响函数矩阵的第q行,y
q
(ω)是分子多项式行向量;c
q
(ω)是分母多项式矩阵;c
q
(ω)、y
q
(ω)可以表示为:
[0152][0153]
其中,[f
r
]是分母矩阵多项式系数;[g
r
]是分子矩阵多项式系数;n是数学模型阶次;z是多项式基数;δt是时域数据采样间隔。
[0154]
首先根据频响函数[h(ω
x
)]取到不同ω
x
的值,组成维数足够多的方程组,利用最小二乘估计原理求出[f
r
]、[g
r
];然后再根据[f
r
],给定[f
n
]=[i]建立一个扩展的友矩阵,求出友矩阵特征值,可得到模态参与因子和极点:
[0155][0156]
其中,友矩阵即伴侣矩阵,其对角线上方或下方的元素均为1,而主对角线元素0,最后一行或第一行的元素可以取得任意值,其他元素均为0。[λ]是对角矩阵,设λ
i
是矩阵的特征值,系统极点s
i
,s
i*
,它们之间关系为:
[0157][0158]
模态阻尼比为:
[0159][0160]
其中,ω
i
是系统在无阻尼理想状态下的固有频率,ω
di
是有阻尼固有频率。
[0161]
最后求解模态振型矩阵。在线模型中根据磁悬浮飞轮转子系统实际的输入输出值得到实测的频响传递函数矩阵,进而计算模态参数中的模态振型矩阵。本实施例中,可以根据在线模型中农传感器采集的应力信号和振点信号,作为磁悬浮飞轮转子系统实际的输入输出,计算模态振型矩阵。
[0162]
根据实测的频响函数拟合函数方程,求解模态振型矩阵。实测的频响函数为:
[0163][0164]
其中,{l}
ih
是模态参与因子行向量{l}
i
的共轭转置,{l}
i
代表磁悬浮飞轮转子系统中各个振点对相应模态的比例贡献,{φ}
i
是第i阶模态振型,{φ}
i*
为{φ}
i
的伴随向量,[lr]、[ur]分别是分析频带外模态影响的下残余项和上残余项矩阵,即模态参数包括有阻尼时的固有频率ω
di
、模态阻尼比ξ
i
和模态振型矩阵。
[0165]
步骤四,在离线模型中,根据轴向分相磁悬浮飞轮转子构建磁悬浮飞轮转子系统的机理模型;将离线模型和在线模型相结合,获取样本数据;所述样本数据包括在线模型中的信号值退化和失效数据以及离线模型中的悬浮力数据,其中,信号值退化和失效数据包括在线模型中传感器检测的应力信号和振动信号,悬浮力数据通过机理模型采样获取;结合样本数据作为数据驱动,基于数据驱动和机理模型融合,构建极限学习机模型,所述极限学习机模型用于识别道路工况。
[0166]
构建机理模型:首先构建轴向分相磁悬浮飞轮转子平动与转动坐标系,如附图3所示,其中:o是平衡位置处的转子质心,f
ax
和f
ay
为a相轴向分相磁悬浮飞轮电机转子所受径向x方向和y方向的悬浮力,f
x
和f
y
分别在转子质心处的悬浮力,f
z
为施加在转子轴向上的悬浮力,l
a
和l
b
分别是电机a相和b相定子中心到质心点o的距离,l为电机a相和b相定子中心之间的距离,l
sa
和l
sb
分别为a相位移传感器和b相位移传感器到质心点o的距离,l
s
为电机a相和b相定子中心之间的距离。
[0167]
机械装配图剖面截面图,如附图4所示,其中:a相传感器和b相传感器安装于电机a相和电机b相的外周。假设,电机a相位移传感器检测到转子径向平动位移分别为x
a
、y
a
,b相位移传感器检测到转子径向平动位移分别为x
b
、y
b
,则转子质心处的平动位移x、y为:
[0168][0169]
转子绕x轴和y轴的转动角α和β分别为:
[0170][0171]
根据公式(28)和公式(29)计算转子偏心。可知悬浮力f与悬浮磁路的电感l
sa
、悬浮绕组电流i和平均气隙长度l
g
的关系式(3):
[0172][0173]
对悬浮力f进行分解有:
[0174]
f
x
=k
x
·
i2ꢀꢀ
(31)
[0175]
f
y
=k
y
·
i2ꢀꢀ
(32)
[0176]
式中:f
x
为悬浮力在x轴方向的分力,f
y
为悬浮力在y轴方向的分力;l
g
为平均气隙长度,β
r
为转矩极极弧,矩极极弧,k
x
为x轴方向的悬浮力系数,k
y
为y轴方向的悬浮力系数,x0、y0分别为转子在x轴和y轴正向上的偏移量。
[0177]
轴向分相磁悬浮飞轮电机的悬浮力模型即机理模型为:
[0178][0179]
式中:f
x
为悬浮力在x轴方向的分力,f
y
为悬浮力在y轴方向的分力,i
xp
为x轴方向上串联的两个悬浮绕组电流;i
yp
为y轴方向上串联的两个悬浮绕组电流。
[0180]
样本数据包括在线模型中的信号值退化和失效数据以及离线模型中的悬浮力数据,其中,信号值退化和失效数据包括在线模型中传感器检测的应力信号和振动信号,悬浮力数据通过机理模型采样获取;悬浮力数据采用时间间隔为0.1s定时采样,总时间为100ms,获取1000组样本集。其中样本数据包括磁悬浮转子飞轮系统的悬浮力、平均路面功率、加速比例、减速比例、匀速比例、怠速比例、平均速度、平均行驶速度、最大速度、最小速度、最大加速度、最大减速度、速度标准偏差、加速度标准偏差、累积行驶距离、平均加速度、平均减速度构成。elm结构图,如附图5所示,其中:elm算法给定n个训练样本对(x
i
,t
i
),i=1,2,...,n,其中x
i
∈r
r
为第i个样本输入向量,x
i
=[x
i1
,...,x
ir
]
t
,t
i
=[t
i1
,...,t
im
]
t
为对应的期望输出向量,每个输出的为m维,设elm的隐含层节点个数为l,激活函数为g(.),则极限学习机模型的公式表达式为:
[0181][0182]
其中x
i
∈r
r
为样本数据中的第i个输入向量,x
i
=[x
i1
,...,x
ir
]
t
,a
l
=[α
l1
,...,α
lg
]
t
是输入层神经元到第l个隐含层神经元的权重向量,b
l
是第l个隐含层神经元的偏差,β
l
=[β
l1
,β
l2
,...,β
lm
]
t
是第l个隐含层神经元到输出层的权重向量,l=1,2,...,l,n为输入样本的总数。含有l个隐层神经元的激活函数g(.)的神经网络能零误差的逼近n个样本,则有
[0183][0184]
即
[0185][0186]
写成矩阵的形式为:
[0187]
hβ=t
ꢀꢀ
(37)
[0188]
其中h为隐含层输出矩阵,β=[β1,β2,...,β
l
]
t
,t=[t1,t2,...,t
n
]
t
,t
i
=[t
i1
,...,t
im
]
t
为对应xi的期望输出向量,期望输出向量为m维。
[0189][0190][0191]
根据公式(38)和公式(39)代入至公式(34)进行计算。
[0192]
c为正则化参数,用于平衡泛化能力和预测精度,通过粒子群优化算法得出最优解β带入输出模型y
i
,得到极限学习机模型,结合模态参数形成模态分类数据库,完成基于数据驱动和机理模型融合的车载飞轮动态建模。
[0193]
本发明基于机理模型和数据驱动相结合的方法,采用极限学习机算法训练样本数据,对飞轮系统悬浮力、平均路面功率、加速比例、减速比例、匀速比例、怠速比例、平均速度、平均行驶速度、最大速度、最小速度、最大加速度、最大减速度、速度标准偏差、加速度标准偏差、累积行驶距离、平均加速度、平均减速度进行训练,建立极限学习机模型,有利于识别道路工况,提高了输出道路工况的准确性。
[0194]
最后应说明的是:以上所述仅是本发明的优选实施方式,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1