一种基于雷达扫描和影像分析的深基坑塌方渗水检测方法与流程
1.本发明属于数字图像处理与计算机应用领域,具体而言涉及一种基于雷达扫描和影像分析的深基坑塌方渗水检测方法。
背景技术:
2.深基坑塌方渗水检测可及时发现工程施工现场的安全隐患,有效预防工程施工安全,具有非常重要的现实意义。利用激光雷达扫描的点云数据和普通二维影像数据,结合传统的点云数据处理方法、图像处理算法及纹理分析技术,可实时在线构建现场施工环境的三维对象模型,分析现场对象的特征,及时发现现场施工环境的变化趋势,一旦发现险情,及时采取声光报警和各种险情播报措施,方便施工方、监理方、管理方和工程属地等各方及时采取必要的应急措施,避免或降低险情带来的伤害。
技术实现要素:
3.为了克服已有技术的不足,本发明提供了一种基于雷达扫描和影像分析的深基坑塌方渗水检测方法,以高密度、真彩色激光扫描点云数据为数据源,利用点云数据的三维坐标和rgb值分别构建深基坑的三维实时模型,融合形成精度高、数据量小、精细度高、真纹理(色彩)的深基坑的三维结构图。
4.本发明解决其技术问题所采用的技术方案是:
5.一种基于雷达扫描和影像分析的深基坑塌方渗水检测方法,包括以下步骤:
6.步骤1、激光扫描雷达与全息摄像头的深基坑三维模型标定:首先固定激光扫描雷达与全息摄像头的相对位置,并一直保持不变;选取设定数量的特征点,建立特征点点云数据与影像数据的一一对应关系,进一步建立其它所有点云数据与影像数据之间的对应关系,建立点云数据与影像数据之间的映射模型;
7.步骤2、深基坑原始模型数据的工程化方式管理:通过三维激光扫描仪获取原始点云和全息影像数据,将输出的点云和全息影像数据按照工程化方式进行存储管理和查找;
8.步骤3、深基坑原始点云预处理:对原始点云进行拼接、去噪、分类、滤波处理,输出预处理后的点云数据;
9.步骤4、深基坑原始点云数据与全景影像的配准:将三维点云数据和全息影像关联并自动按第一条关系进行配准映射,输出影像点云数据;
10.步骤5、基于影像点云的深基坑三维建模;
11.步骤6、基于雷达扫描和影像对比的深基坑塌方检测:对比深基坑三维模型,若深基坑内切面模型大范围压缩,裂缝增大超过阈值,则认定为塌方即将发生;
12.步骤7、基于雷达扫描和影像对比的深基坑渗水检测:对比深基坑影像数据,在影像数据基本不变的情况,若雷达扫描数据变化超过阈值,则认定为渗水发生。
13.所述步骤5中,基于影像点云的深基坑三维建模的过程如下:
14.5.1、在三维点云俯视图上,利用点云切面,快速勾画深基坑内切面的轮廓线,自动
利用点云计算深基坑内切面并将轮廓进行拉伸,构建深基坑内切面模型;获取高密度深基坑内切面的三维坐标,利用三维激光点云数据的三维坐标构建深基坑内切面的模型;
15.5.2、全景纹理贴图:对于构建好的深基坑内切面模型,支持通过与全息影像融合进行纹理提取,在三维模型中显示与其对应的贴图纹理,结合安置在激光扫描仪上的相机获取扫描对象的影像数据,利用三维激光点云数据的rgb值构建深基坑内切面的正射影像图;
16.5.3、深基坑内切面详细勾勒:将深基坑内切面模型和正射影像图进行融合,形成深基坑内切面的三维模型,并进一步构建细小石块、裂缝、坑孔三维模型。
17.所述步骤6中,裂缝的提取过程:首先是搜索深度图像中的裂缝像素,然后将其反向投影到原始二维可见图像中,查找对应纹理信息,最后得到裂缝信息,步骤如下:
18.6.1)对激光扫描得到深度图进行简单的中值滤波、腐蚀、收缩、扩张操作,由于深度图中没有复杂的纹理,图像相对平滑,且边缘清晰,故经过上述图像处理操作之后,不会对深度图的质量造成较大影响;
19.6.2)对比滤波前后的深度图像,对像素值发生变化的像素点进行标记,得到,得到裂缝的中心线像素,当中心线像素值为连续延伸或形成较大的圆圈结构,即延伸长度超过一定数值或圆圈周长超过一定数值,就可暂时将其认定为裂缝结构;
20.6.3)对6.2)中被标记的裂缝像素点进行反向投影,投影到原先的二维纹理图像相对应位置,并分析该处的纹理结构,即对该处纹理图像进行中值滤波、腐蚀、收缩、扩张操作,如果最后也得到与6.2)相同的裂缝中心线图像像素信息和形状,即可认定该处确实存在裂缝;
21.6.4)统计6.3)裂缝长度、宽度和像素的个数信息作为裂缝大小的衡量指标,并根据这些信息进一步分析裂缝的发展趋势,裂缝增大超过阈值,则认定为塌方即将发生。
22.所述步骤7中,渗水状况识别统计同样也先从深度图像分析入手,首先每隔一段时间比较前后两帧的深度图像像素值,找出深度图像中深度变化最大的地方,提取像素值变化的连续封闭区域,再比较同一时间的两帧二维纹理图像的同一区域像素值,如果同一时间的两帧二维纹理图像同样区域的像素值变化未超过相应的阈值则可能该区域存在渗水(因为水的透明特性,渗水时表现为深度图像发生变化,纹理图像基本没变化)。最后比较渗水的水形状模型,若符合其中某种水的形状模型,则确认该区域存在渗水,并进一步根据渗水区域的面积、体积、渗水变化速度等信息给出不同的预警措施和自动处置措施。
23.本发明的有益效果主要表现在:以高密度、真彩色激光扫描点云数据为数据源,利用点云数据的三维坐标和rgb值分别构建深基坑的三维实时模型,融合形成精度高、数据量小、精细度高、真纹理(色彩)的深基坑的三维结构图。
附图说明
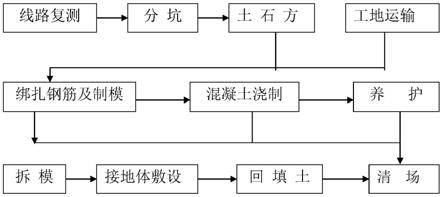
24.图1是深基坑施工流程图。
25.图2是激光雷达扫描深度图。
具体实施方式
26.下面结合附图对本发明作进一步描述。
27.参照图1和图2,一种基于雷达扫描和影像分析的深基坑塌方渗水检测方法,包括以下步骤:
28.步骤1、激光扫描雷达与全息摄像头的深基坑三维模型标定:首先固定激光扫描雷达与全息摄像头的相对位置,并一直保持不变;选取设定数量的特征点,建立特征点点云数据与影像数据的一一对应关系,进一步建立其它所有点云数据与影像数据之间的对应关系,建立点云数据与影像数据之间的映射模型;
29.步骤2、深基坑原始模型数据的工程化方式管理:通过三维激光扫描仪获取原始点云和全息影像数据,将输出的点云和全息影像数据按照工程化方式进行存储管理和查找;
30.步骤3、深基坑原始点云预处理:对原始点云进行拼接、去噪、分类、滤波处理,输出预处理后的点云数据;
31.步骤4、深基坑原始点云数据与全景影像的配准:将三维点云数据和全息影像关联并自动按第一条关系进行配准映射,输出影像点云数据;
32.步骤5、基于影像点云的深基坑三维建模;
33.步骤6、基于雷达扫描和影像对比的深基坑塌方检测:对比深基坑三维模型,若深基坑内切面模型大范围压缩,裂缝增大超过阈值,则认定为塌方即将发生;
34.步骤7、基于雷达扫描和影像对比的深基坑渗水检测:对比深基坑影像数据,在影像数据基本不变的情况,若雷达扫描数据变化超过阈值,则认定为渗水发生。
35.所述步骤5中,基于影像点云的深基坑三维建模的过程如下:
36.5.1、在三维点云俯视图上,利用点云切面,快速勾画深基坑内切面的轮廓线,自动利用点云计算深基坑内切面并将轮廓进行拉伸,构建深基坑内切面模型;获取高密度深基坑内切面的三维坐标,利用三维激光点云数据的三维坐标构建深基坑内切面的模型;
37.5.2、全景纹理贴图:对于构建好的深基坑内切面模型,支持通过与全息影像融合进行纹理提取,在三维模型中显示与其对应的贴图纹理,结合安置在激光扫描仪上的相机获取扫描对象的影像数据,利用三维激光点云数据的rgb值构建深基坑内切面的正射影像图;
38.5.3、深基坑内切面详细勾勒:将深基坑内切面模型和正射影像图进行融合,形成深基坑内切面的三维模型,并进一步构建细小石块、裂缝、坑孔三维模型。
39.本实施例中,点云数据与摄像数据融合原理,首先对该方法中涉及的几个相关坐标系进行介绍,其中包括:世界坐标系、摄像机坐标系、图像平面坐标系、图像存储坐标系。
40.世界坐标系:被拍摄对象在三维立体空间中的坐标系。
41.摄像机坐标系:以摄像机透镜光心为原点的坐标系。
42.图像平面坐标系:以图像平面与摄像机光轴的交点为原点的坐标系。
43.图像存储坐标系:以图像的左上角为原点的坐标系。
44.世界坐标系转换为摄像机坐标系:o
w
为世界坐标系的原点,o
c
为摄像机坐标系的原点,x
w
、y
w
、z
w
与x
c
、y
c
、z
c
分别为世界坐标系与摄像机坐标系中的x轴、y轴与z轴。两个坐标系中,x
w
、y
w
分别与x
c
、y
c
方向相同,z
w
与z
c
方向相向。对于被拍摄对象在世界坐标系中的位置坐标,其数值是绝对的,与摄像机的位置无关。可以由下式将世界坐标转换为摄像机坐标:
[0045][0046]
其中,r为正交旋转矩阵,大小为3
×
3;t为平移矩阵,大小为3
×
1。
[0047]
摄像机坐标系转换为图像平面坐标系:对于摄像机针孔模型,对于空间中的任意一点p,其在摄像机坐标系中的坐标为p(x
c
,y
c
,z
c
)。点p和摄像机光心o
c
的连线o
c
p交图像平面于点p(x,y)。摄像机的光轴z
c
与图像平面垂直,其交点o1为图像平面坐标系的原点。摄像机的焦距为光心o
c
与原点o1之间连线的长度,大小为f。由相似三角形之间的关系,易得:
[0048][0049][0050]
即:
[0051][0052]
将式(3
‑
4)表示为齐次坐标形式,如下所示:
[0053][0054]
利用式(3)
‑
(5)便能够完成摄像机坐标系到图像平面坐标系的转换。
[0055]
图像平面坐标系转换为图像存储坐标系:o1为图像平面坐标系的原点,o0为图像存储坐标系的原点。在图像存储坐标系中,o1的坐标为(u0,v0)。假定每一个像素点在沿x轴和y轴方向的长度分别为d
x
、d
y
,则对于图像存储坐标系中的任意一点(u,v)可以用下式表示:
[0056][0057]
转换为齐次坐标形式,可以表示为:
[0058]
[0059]
综合式(1)、(5)和(7),可以得到点p在图像存储坐标系与世界坐标系中的坐标关系:
[0060][0061]
在式(8)中,q为3
×
4的内参矩阵,a
x
与a
y
分别为透镜的物理焦距f与像素点在x轴和y轴方向的长度d
x
、d
y
的比值,即:
[0062][0063]
k为4
×
4的外参矩阵,矩阵中的参数由摄像机的旋转角度,以及摄像机在世界坐标系中的位置决定。p为3
×
4的投影矩阵,由内参和外参共同决定。
[0064]
观察式子(3)
‑
(8)可以发现,在给定摄像机内外参数(可由摄像机标定得到)给定的情况下,对于世界坐标系中的任意一点p(x
w
,y
w
,z
w
),都能够在图像存储坐标系中找到其投影点坐标(u,v)。但相反的情况下,若已知像素坐标为(u,v),则无法得到与其对应的唯一空间坐标点p(x
w
,y
w
,z
w
),当且仅当该像素的深度值z
w
已知时,才能够确定唯一的对应点p。因此,一般在合成图像之前,需对像素点的深度值进行计算。
[0065]
深基坑人工作业时坑上一个摄像机、坑下提土框边有一个摄像机和一个激光雷达,数据分析时必须将三个影像资料合成一个完整的深基坑三维影像图,点云数据与摄像数据融合过程中,最核心的部分即为图像三维变换。即将图像存储坐标系中的每一个像素点,结合其对应的深度信息,投影到世界坐标系中,即将2维图像转换到3维空间中,这样后续的显示、旋转、切换视点,都可以非常方便的实现;也可以在此基础上,在世界坐标中进行图像的滤波、腐蚀、收缩、扩张等多种操作,提取需要的特征。
[0066]
针对裂缝的提取,首先是搜索深度图像中的裂缝像素,然后将其反向投影到原始二维可见图像中,查找对应纹理信息,最后得到裂缝信息,步骤如下:
[0067]
6.1)对激光扫描得到深度图进行简单的中值滤波、腐蚀、收缩、扩张等多种操作。由于深度图中没有复杂的纹理,图像相对平滑,且边缘清晰,故经过上述图像处理操作之后,不会对深度图的质量造成较大影响;
[0068]
6.2)对比滤波前后的深度图像,对像素值发生变化的像素点进行标记,得到,得到
裂缝的中心线像素,当中心线像素值为连续延伸或形成较大的圆圈结构,即延伸长度超过一定数值或圆圈周长超过一定数值,就可暂时将其认定为裂缝结构;
[0069]
6.3)对6.2)中被标记的裂缝像素点进行反向投影,投影到原先的二维纹理图像相对应位置,并分析该处的纹理结构,即对该处纹理图像进行中值滤波、腐蚀、收缩、扩张操作,如果最后也得到与6.2)相同的裂缝中心线图像像素信息和形状,即可认定该处确实存在裂缝;
[0070]
6.4)统计6.3)裂缝长度、宽度和像素的个数信息作为裂缝大小的衡量指标,并根据这些信息进一步分析裂缝的发展趋势,裂缝增大超过阈值,则认定为塌方即将发生,给出相应的报警信号,并采取相应的防范措施。
[0071]
所述步骤7中,渗水状况识别统计同样也先从深度图像分析入手,首先每隔一段时间比较前后两帧的深度图像像素值,找出深度图像中深度变化最大的地方,提取像素值变化的连续封闭区域,在比较统一时间的两帧二维纹理图像同样区域的像素值,如果统一时间的两帧二维纹理图像同样区域的像素值变化不大则可能该区域存在渗水。最后比较渗水的水形状模型,若符合其中某种水的形状模型,则确认该区域存在渗水,并进一步根据渗水区域的面积、体积、渗水变化速度等信息给出不同的预警措施和自动处置措施。
[0072]
本实施例的深基坑施工流程如下:
[0073]
1)架设深基坑上作业机械,包括机械框架、边缘处理网关、摄像头、激光雷达等,还有通风装置、自动断电装置、报警上传设备等与工程报警和熔断相关的执行机构和自动触发的设备;
[0074]
2)工程报备,设备数据上传;
[0075]
3)工程施工开始,摄像头和激光雷达开始工作,并实时记录工程施工过程;
[0076]
4)检测到深基坑危险气体超标,自动启动鼓风机排风鼓气及自动上传报警信息,直到深基坑地步气体浓度满足要求;
[0077]
5)雷达和摄像头检测裂缝并实时检测裂缝的发展变化,当裂缝到达报警值时,启动本地声光报警并上传报警信息,当裂缝到达报警上限时,上传报警信息同时切断除逃生通道外的所有电源,并启动逃生进程;
[0078]
6)雷达和摄像头检测渗水并实时检测渗水的发展变化,当渗水到达报警值时,启动本地声光报警并上传报警信息,当渗水到达报警上限时,上传报警信息同时切断除逃生通道外的所有电源,并启动逃生进程;
[0079]
7)直至施工完成,设备拆除。
[0080]
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1