一种对果园机器人省工以及评定效果的分析方法
1.本发明属于果树智能化栽培管理技术领域,尤其是一种对果园机器人省工以及评定效果 的分析方法。
背景技术:
2.中国是农业大国,几千年文化的农业发展均是通过人们的智慧与辛勤的劳动一步一步发 展到今天的,而今,随着科学技术和经济的快速发展,智能控制技术为现代农业带来了新的 研究思路,例如植物表型采集信息机器人,能够在保证作业质量的前提下能提高工作效率, 降低人工成本,改善果园生产环境,防止农药、化肥及病虫害对人体的伤害,且采集信息能 够高效,快速,正是未来果园获取信息省工装备的首选;但是,目前果园内较多使用的还是 传统的人工手动栽培管理方法,因为他们认为这种采集机器人采集的信息及体现的结果不会 那么准确,因此依旧坚持人工手动栽培管理,但是人工手动栽培管理这种方式确实花费时间 长,工作繁琐,工作量大,并且只能获得部分指标。这些缺点大大地降低了果园内栽培管理 的效率,提高了人工成本,最终导致果园经济效益下降,难以满足现代精细农业的要求。因 此,对采集信息机器人省工以及评定效果的分析迫在眉睫。
3.通过检索未发现与本技术相关的专利文献。
技术实现要素:
4.本发明的目的在于克服现有技术的不足之处,提供一种对果园机器人省工以及评定效果 的分析方法,该分析方法科学合理、分析数据准确且客观,实现了量化分析,分析结果直观 可见,参考价值高。
5.本发明解决其技术问题是采取以下技术方案实现的:
6.一种对果园机器人省工以及评定效果的分析方法,包括如下步骤:
7.步骤1:供试果园试验地的确定;
8.步骤2:对确定的果园试验地进行划分,划分成若干个区域;
9.步骤3:对划分好的若干个区域中随机选取若干组,并在对这若干组内的果树再随机选 取若干株进行标记;
10.步骤4:利用机器人和传统人工监测法分别对标记的果树进行监测;
11.步骤5:将步骤4中机器人监测到的植物的数据与传统人工监测法监测到的植物的信息 数据根据监测内容分别进行对比,并且将每项监测内容的数据通过计算相对误差值来综合分 析评判机器人的监测效果,相对误差其中相对误差的具体的计算公式如下:
12.(δ:相对误差;j:机测数据,r:人测数据)
13.步骤6;将步骤4中的每个监测时期的机器人监测采集植物信息数据所花费的时间与传 统人工监测采集植物信息数据所花费的时间进行对比,并且结合步骤5得到的监测效
果,确 定机器人监测采集植物信息数据比传统人工监测采集植物信息数据是否真的实现省工的目 的。
14.进一步,所述步骤1中的供试果园试验地为现有果园,该果园面积在100亩以上,且每 亩栽植有300-500株果树。
15.进一步,所述步骤2的划分是根据果实品种对果树进行按亩划分,再分别从每种果实品 种的种植亩数中均随机选择1亩;再将每亩栽种的果树株数均等划分成10个区域。
16.进一步,所述步骤3对区域的选取个数为3组.
17.进一步,所述步骤4还包括监测条件,所述监测条件包括监测时期、监测人数、监测内 容。
18.进一步,所述步骤4监测时均还需要携带计时器进行计时。
19.进一步,所述监测时期分为花后期、壮果期、采收期。
20.进一步,所述监测内容包括果园植物生长动态;果实特征,具体为果实识别、果实大小、 果实体积、果实质量;适时疏果,具体为单穗重、果实密度;果实成熟度检测,具体为果实 成熟期颜色的特征。
21.进一步,所述监测人数为2-4人。
22.本发明的优点和积极效果是:
23.本发明提供的一种对果园机器人省工以及评定效果的分析方法,通过随机采样的方式、 数据的误差对比以及对结果与所花时间的对比能够较为精准的分析出利用机器人对果园进行 监测较为省工的目的,本方法科学合理、分析数据准确且客观,实现了量化分析,分析结果 直观可见,参考价值高。
具体实施方式
24.下面通过具体实施例对本发明作进一步详述,以下实施例只是描述性的,不是限定性的, 不能以此限定本发明的保护范围。
25.一种对果园机器人省工以及评定效果的分析方法,包括如下步骤:
26.步骤1:供试果园试验地的确定;
27.选择一个现有果园,果园的面积在100亩以上,且每亩栽植300-500株果树;
28.步骤2:对确定的果园试验地进行划分,划分成若干个区域;
29.首先根据果实品种对果树进行按亩划分,在分别从每种果实品种的种植亩数中均随机选 择1亩;再将每亩栽种的果树株数均等划分成10个区域;
30.步骤3:对划分好的若干个区域中随机选取若干组,并在对这若干组内的果树再随机选 取若干株进行标记;
31.在步骤2划分的10个区域内随机选择3个,再从选择后的每个区域中再随机选择若干株 果树进行标记;
32.步骤4:利用机器人和传统人工监测法分别对标记的果树进行监测;
33.其中,监测条件包括:1)、监测时期:依次为花后期、壮果期、采收期;2)监测人数: 每次均为2-4人;3)监测内容如下:1)果园植物生长动态;2)果实特征(果实识别、果实 大小、果实体积、果实质量);3)适时疏果(单穗重、果实密度);4)果实成熟度检测(果 实成熟期颜色的特征);其中监测采集信息时间:利用计时器进行计时;
34.步骤5:将步骤4中机器人监测到的植物的数据与传统人工监测法监测到的植物的信息 数据根据监测内容分别进行对比,并且将每项监测内容的数据通过计算相对误差值来综合分 析评判机器人的监测效果,相对误差其中相对误差的具体的计算公式如下:
35.(δ:相对误差;j:机测数据,r:人测数据)
36.步骤6;将步骤4中的每个监测时期的机器人监测采集植物信息数据所花费的时间与传 统人工监测采集植物信息数据所花费的时间进行对比,并且结合步骤5得到的监测效果,确 定机器人监测采集植物信息数据比传统人工监测采集植物信息数据是否真的实现省工的目 的。
37.本实施例对上述分析方法进行了验证实验:
38.步骤1:供试果园试验地的确定
39.本试验地位于天津市滨海新区汉沽大田镇芦后村,其气候为温暖带滨海半湿润大陆性季 风气。试验地为盐碱土,质地偏黏,ph为7.8,含盐量为0.18%,株行距为0.5m
×
2m,供 试园面积160亩,密度为每亩栽植500株,且均为露天栽培,肥力条件一致,灌溉条件良好; 且果树为葡萄藤;
40.步骤2:对确定的果园试验地进行划分,划分成若干个区域;
41.本试验地的葡萄品种共8种,因此每种品种的葡萄随机选择它的其中一亩,共选出8亩, 并将选择的这八亩中的每一亩内的葡萄藤再次均等分成10个区域,每个区域为有50株;
42.步骤3:对划分好的若干个区域中随机选取若干组,并在对这若干组内的果树再随机选 取若干株进行标记;
43.在步骤2划分的10个区域内随机选择3个,再从选择后的每个区域中再随机选择30株 葡萄藤进行标记;
44.步骤4:利用机器人和传统人工监测法分别对标记的果树进行监测;
45.其中,监测条件包括:1)、监测时期:依次为花后期、壮果期、采收期;2)监测人数: 每次均为2-4人;3)监测内容如下:1)果园植物生长动态;2)果实特征(果实识别、果实 大小、果实体积、果实质量);3)适时疏果(单穗重、果实密度);4)果实成熟度检测(果 实成熟期颜色的特征);其中监测采集信息时间:利用计时器进行计时;
46.且两者监测方式的具体监测过程如下:
47.a、利用机器人监测:
48.首先将植物表征信息采集机器人依次设置在步骤3随机选择出来的单元区域中;启动机 器进行采集;本步骤采用的植物表征信息采集机器人为现有技术,其结构及原理如下:
49.信息采集机器人的机器视觉系统采用基于cmos芯片的摄像头作为园内果实图像采集的 工具。(1)信息采集机器视觉系统的硬件分为信息处理及控制系统、图像采集模块和红外发 射模块三个部分。(2)图像采集模块利用彩色cmos和红外cmos分别采集彩色图像信号和深 度图像信号。(3)彩色cmos以自然光线作为光源采集彩色图像信号,红外cmos利用成像处 理器控制红外发射模块发射的红外结构光进行深度图像信号采集。(4)成像处理
器将彩色图 像信号和深度图像信号分别进行处理并将图像信号转换成数字图像,数字图像利用标准usb 接口传送至信息处理及控制系统进行处理。(5)信息处理及控制系统利用有线或是无线两种 方式与计算机进行数据交互,根据计算机发来的控制指令,信息处理及控制系统将数字图像 和结果数据传输至计算机,最后在计算机上输出显示。
50.一种低空两用的信息采集机器人,然后通过装载不同用途的传感器,对园内障碍物、果 实遮挡现象以及植物生长状态的实时监测。从而解决(1)果树生长状态,为今后营养诊断提 供理论依据;(2)果实特征,能够较快的完成果实分级处理,同时果实单质量也是评定果实 认可度的指标之一,为今后栽培管理提供依据;(3)人为看不到果实遮挡现象,通过红外光 谱进行采集,适时完成疏果任务,让养分充分利用,为市场供应带来经济效益提供基础;(4) 采用视觉系统图像处理法也能够避免因在自然光源下工作采集的图像出现光源现象带来的困 惑。
51.测定内容及过程如下:
52.1)果园植物生长动态
53.新稍长度变化、新稍粗度变化、叶面积变化、叶绿素含量变化,均通过光谱进行扫描得 出;
54.2)果实特征(果实识别、果实大小、果实体积、果实质量)
55.a果实识别:
56.视觉系统对果实进行精确定位,将果实从整个图像中分割下来,利用色谱对图像进行颜 色空间转换处理,运算处理,得到轮廓清晰的目标图像轮廓,对图像进行二值化处理,过滤 到边缘的杂物,得到清晰的果实图像;
57.b果实果形指数、果实体积、单果重:
58.在识别到的果实图像中进行目标标记,然后将图像颜色空间进行转换,canny边缘检测, 获取图像的边缘信息处理;然后对边缘信息进行过滤,去除背景区域信息,得到果实的边缘 图像;然后进行图像的距离变换处理;果实区域分割,获取果实个体的外部轮廓;最后对分 割后的区域轮廓进行类圆拟合处理,获取每个轮廓的拟合圆的圆心坐标和圆的半径:对比各拟 合圆的圆心和半径值,如果两个拟合圆的圆心距离小于二者的最小半径的一半,则认定两个 轮廓区域同属于一个果实,将两个区域轮廓进行融合。并再次进行类圆拟合;
59.果型指数、果实质量可以通过信息采集机器人直接进行估测;
60.由于果园内果实大多为椭球形至圆形,因此根据体积公式:
61.v=4/3πabc(v为体积;a、b、c为果实三个轴线方向上的直径mm)
62.3)适时疏果(单穗重、果实密度)
63.借助视觉系统拟定的程序,能快速的检测到果实的分布情况,以及与植物枝叶的比值, 能够了解到是否满足其果实营养的供应,然后适时的进行蔬果,使其与树体营养达到营养平 衡。
64.4)果实成熟度检测(果实成熟期颜色的特征)
65.借助采集信息机器人,通过光谱分析,能够直观的分析出果实成熟度,能够做到适时采 摘,供应市场需求。
66.b、采用传统人工监测法监测,记录监测到的数据:
67.1)果园植物生长动态
68.新梢长度采用卷尺测定;
69.新梢粗度采用游标卡尺于新梢基部第二节中部测定其粗度;
70.叶片面积采用游标卡尺测定新梢第4节叶片的中脉长,根据叶面积计算公式:y= 0.6933x2+5.5069x-15.1966(r2=0.9419),其中x为叶片中脉度,得出叶片叶面积,各处理 随机测15个叶片,求平均值。
71.叶绿素含量采用spad502叶绿素仪测定,各处理随机测15个叶片,求平均值。
72.2)果实特征(果实识别、果实果形指数、果实体积、果实质量)
73.a果实识别:
74.通过果实着色情况了解果实成熟期,或凭借多年栽培管理经验进行适地品尝;
75.b果实果形指数:
76.利用游标卡尺进行测量其横径、纵径;果形指数=纵径/横径;
77.c果实体积、单果重:
78.在测量果实的直径时,将卡尺两个尺脚的测量面卡在果实的赤道线处,和测量果实的长 度数据一样,分别测量三次,取平均值作为果实的直径。试验测量为果实的纵径和果实的横 径;利用排水法:将果实浸入排水烧杯中利用溢出水的体积测量果实的体积。
79.3)适时疏果(单穗重、果实密度)
80.传统蔬果一般人为进行,对果实疏密程度做到合理掌控,使其达到树体果实营养均衡;
81.4)果实成熟度检测(果实成熟期颜色的特征)
82.传统多采用肉眼观测、凭借栽培经验观察成熟期的颜色变化,需要摘取进行试尝。
83.步骤5:将步骤4中机器人监测到的植物的数据与传统人工监测法监测到的植物的信息 数据根据监测内容分别进行对比,并且将每项监测内容的数据通过计算相对误差值来综合分 析评判机器人的监测效果,相对误差其中相对误差的具体的计算公式如下:
84.(δ:相对误差;j:机测数据,r:人测数据)
85.本实施例监测得到的数据内容及分析如下:
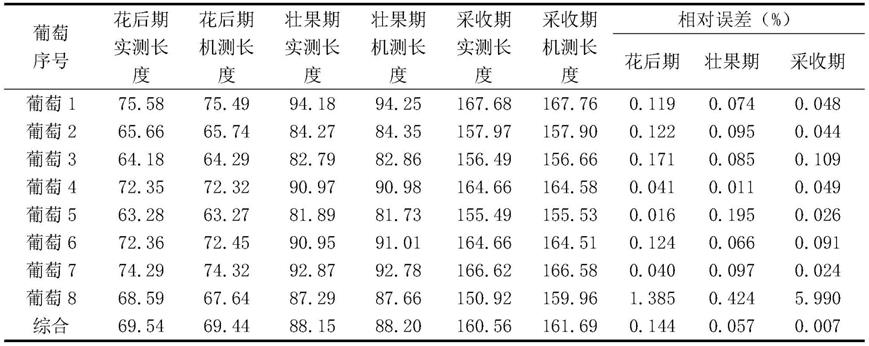
86.表1葡萄新稍长度动态变化的检测结果(单位为cm)
87.88.由表1可知,在葡萄花后期、壮果期、采收期分别对新稍长度进行对比,得到在花后期、 壮果期采收期新稍长度的综合相对误差分别为0.144%、0.057%、0.007%。可见采用传统方式 和机器人采集得到的新稍长度的生长动态值基本相同。
89.表2葡萄新稍粗度的动态变化的检测结果(单位:mm)
[0090][0091]
由表2可知,在葡萄花后期、壮果期、采收期分别对新稍粗度进行对比,得到在花后期、 壮果期采收期新稍粗度的综合相对误差分别为1.882%、1.155%、1.828%。可见采用传统方式 和机器人采集得到的新稍粗度的生长动态值基本相同。
[0092]
表3葡萄叶面积的动态变化的检测结果(单位:cm2)
[0093][0094]
由表3可知,在葡萄花后期、壮果期、采收期分别对叶面积进行对比,得到在花后期、 壮果期采收期叶面积的综合相对误差分别为0.430%、0.020%、0.647%。可见采用传统方式和 机器人采集得到的叶面积的生长动态值基本相同。
[0095]
表4葡萄叶绿素含量动态变化的检测结果(单位:mg/g)
[0096][0097]
由表4可知,在葡萄花后期、壮果期、采收期分别对叶绿素含量进行对比,得到在花后 期、壮果期采收期叶绿素含量的综合相对误差分别为6.409%、6.339%、3.579%。可见采用传 统方式和机器人采集得到的叶绿素含量的生长动态值基本相同。
[0098]
表5葡萄果实果形指数检测结果
[0099][0100]
由表5可知,利用传统监测和机器人采集到的信息进行比较,得出果形指数的相对误差 范围为0.848%-10.476%,数据基本相同,说明机测数据具有可靠性。
[0101]
表6葡萄果实体积检测结果
[0102][0103]
由表6可知,利用传统测量和机器人采集到的信息进行比较,得出果实体积的相对误差 范围为0.176%-6.658%,数据基本相同,说明机测数据具有可靠性。
[0104]
表7葡萄果实单果重检测结果(单位:g)
[0105][0106]
由表7可知,利用传统测量和机器人采集到的信息进行比较,得出果实单果重的相
对误 差范围为0.154%-0.710%,数据基本相同,说明机测数据具有可靠性。
[0107]
表8葡萄果实密度检测结果(单位:g/cm3)
[0108][0109]
由表8可知,利用传统测量和机器人采集到的信息进行比较,得出果实密度的相对误差 范围为0-6.535%,数据基本相同,说明机测数据具有可靠性。
[0110]
表9葡萄果实单穗重检测结果(单位:g)
[0111][0112]
由表9可知,利用传统测量和机器人采集到的信息进行比较,得出果实单穗重的相对误 差范围为0.002%-0.009%,数据基本相同,说明机测数据具有可靠性。
[0113]
综上所述,机器人监测到的植物的数据与传统人工监测法监测到的植物的信息数据基本 相同,因此机器人监测到的植物的数据效果精确度较高。
[0114]
步骤6;将步骤4中的每个监测时期的机器人监测采集植物信息数据所花费的时间与传 统人工监测采集植物信息数据所花费的时间进行对比,并且结合步骤5得到的监测效果,确 定机器人监测采集植物信息数据比传统人工监测采集植物信息数据是否真的实现省工的目 的。
[0115]
表10机器人监测与传统人工监测采收期所花时间
[0116]
[0117]
由表10可知,在监测结果相同的情况下,监测相同数量、内容以及人工,机器人监测植 物数据所花费的时间远远快于传统人工监测植物数据所花费的时间,因此机器人监测植物数 据分析处理得到的评价结果的可靠性较高,而且比传统人工监测植物数据然后分析处理得到 的评价结果省工。
[0118]
本发明提供的一种对果园机器人省工以及评定效果的分析方法,通过随机采样的方式、 数据的误差对比以及对结果与所花时间的对比能够较为精准的分析出利用机器人对果园进行 监测较为省工的目的,本方法科学合理、分析数据准确且客观,实现了量化分析,分析结果 直观可见,参考价值高。
[0119]
尽管为说明目的公开了本发明的实施例,但是本领域的技术人员可以理解:在不脱离本 发明及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本发明的 范围不局限于实施例所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1