一种分区域解码的方法及条码阅读设备与流程
1.本发明涉及条码识读领域,具体地说涉及一种分区域解码的方法及条码阅读设备。
背景技术:
2.条码阅读设备是用于识别和读取条码中的信息的电子设备,其中影像式条码阅读设备主要由摄像头、存储器和处理器以及可扩展外设组成,处理器控制摄像头采集包含条码的图像后,处理器调用图像算法计算出条码图像的边缘数据,再调用解码算法对提取的条码图像区域进行解码。
3.图像算法提取条码图像边缘时受制于所采集图像的质量,模糊或者过度曝光等问题可能造成对条码图像边缘提取的误差,从而导致解码失败的情况发生,当图像中存在多个条码时,不同区域受到光照等因素影响也对图像边缘提取算法提出了巨大考验,此外,算法自身涉及高阶矩阵算法需要占用大量系统资源以及运行时间,仍有待于改良。
技术实现要素:
4.为此,本发明所要解决的技术问题在于现有技术中图像算法提取条码图像的计算量大,重复执行耗费资源,以及识别多个条码存在困难的情况。
5.为解决上述技术问题,本发明采用以下技术方案:
6.一种分区域解码的方法,包括以下步骤:
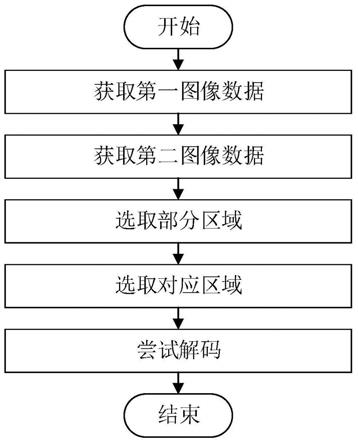
7.s1:获取第一图像数据,所述第一图像数据中每个像素值表示色彩信息,图像记录的场景中包含条码;
8.s2:获取第二图像数据,所述第二图像数据中每个像素值表示深度信息,图像记录的场景与所述第一图像数据相同;
9.s3:建立像素间映射关系,所述映射关系是指所述第一图像数据中的像素与所述第二图像数据中的像素之间的对应关系;
10.s4:选取所述第二图像数据中的部分区域,所述部分区域具有相同的深度信息;
11.s5:选取所述部分区域在所述第一图像数据中的对应区域,所述对应区域根据所述像素间映射关系得到。
12.s6:使用解码算法对所述对应区域进行尝试解码。
13.优选地,上述步骤s6中,若解码失败,则使用所述解码算法对所述第一图像数据进行尝试解码。
14.优选地,上述步骤s4中,所述部分区域具有最小深度信息。
15.优选地,上述步骤s4中,所述部分区域的数量大于一。
16.一种分区域解码的条码阅读设备,其特征在于,包括第一摄像头、第二摄像头、存储器和处理器,所述第一、第二摄像头用于采集图像,所述存储器存储有软件程序,所述软件程序适于由所述处理器加载运行,控制所述条码阅读设备完成以下内容:
17.第一摄像头获取第一图像数据,所述第一图像数据中每个像素值表示色彩信息,图像记录的场景中包含条码;
18.第二摄像头获取第二图像数据,所述第二图像数据中每个像素值表示深度信息,图像记录的场景与所述第一图像数据相同;
19.处理器建立像素间映射关系,所述映射关系是指所述第一图像数据中的像素与所述第二图像数据中的像素之间的对应关系;
20.处理器选取所述第二图像数据中的部分区域,所述部分区域具有相同的深度信息;
21.处理器选取所述部分区域在所述第一图像数据中的对应区域,所述对应区域根据所述像素间映射关系得到;
22.处理器使用解码算法对所述对应区域进行尝试解码。
23.优选地,处理器若解码失败,则使用所述解码算法对所述第一图像数据进行尝试解码。
24.优选地,所述部分区域具有最小深度信息。
25.优选地,所述部分区域的数量大于一。
26.上述本发明的技术方案相对于现有技术具有以下优点:
27.1、本发明的一种分区域解码的方法及条码阅读设备,通过深度图像确定条码载体的具体区域,减少被解码的数据量,避免色彩图像质量不佳造成图像边缘提取失败等问题。
28.2、本发明的一种分区域解码的方法及条码阅读设备,解码失败时再对整帧色彩图像进行解码,尽可能减少回滚操作,节约运行资源。
29.3、本发明的一种分区域解码的方法及条码阅读设备,根据解码时的特点,例如条码载体会置于设备最近的位置、会置于摄像头视场靠近中心位置等,对特定位置范围的区域进行解码,加快运行速率,提升解码成功概率。
30.4、本发明的一种分区域解码的方法及条码阅读设备,通过深度图像确定出多个区域,对色彩图像对应的多个区域进行解码,实现多条码的快速识别处理。
附图说明
31.为了使本发明的内容更容易被清楚地理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中,
32.图1为本发明实施例一所述的流程图。
33.图2为本发明实施例二所述的系统框图。
34.附图标记说明:
35.1、处理器;2、存储器;3、按键;4、指示灯;5、蜂鸣器;6、通信接口;7、第一摄像头;8、第二摄像头。
具体实施方式
36.下面结合附图和具体实施例来对本发明进行详细的说明。
37.实施例一
38.一种分区域解码的方法,流程图如图1所示,流程包括以下步骤:
39.s1:获取第一图像数据,所述第一图像数据中每个像素值表示色彩信息,图像记录的场景中包含条码。所述色彩信息是指像素的值是使用rgb、yuv等色彩空间作为表示的格式,所述第一图像数据可以是彩色图、黑白图等。
40.s2:获取第二图像数据,所述第二图像数据中每个像素值表示深度信息,图像记录的场景与所述第一图像数据相同。所述深度信息是指将从图像采集器到场景中各点的距离作为像素的值,深度图像一般以灰度图的形式呈现,不同的灰度代表不同的深度值。
41.s3:建立像素间映射关系,所述映射关系是指所述第一图像数据中的像素与所述第二图像数据中的像素之间的对应关系。色彩图像与深度图像经过图像配准算法处理后可以形成像素间的对应关系,所述图像配准算法可以采用基于特征图像配准、基于灰度图像配准、基于变换域图像配准等算法,经配准后,所述第一图像数据中每个像素的深度信息可以在所述第二图像数据中确定,所述第二图像数据中每个像素的色彩信息可以在所述第一图像数据中确定。
42.s4:选取所述第二图像数据中的部分区域,所述部分区域具有相同的深度信息。场景中不同物体在二维平面图像中所占据的区域范围在深度图中表现为相同灰度所圈定的区域,通过在深度图像中确定出一个由相同灰度组成的区域,可以确保物体的深度信息完整地存在于该区域中。
43.s5:选取所述部分区域在所述第一图像数据中的对应区域,所述对应区域根据所述像素间映射关系得到。由于所述第一图像数据与所述第二图像数据存在对应关系,因此可以根据所述第二图像数据中确定出的部分区域确定出所述第一图像数据中的与之对应的区域,所述对应区域将包含完整的物体图像,从而确定了附着在物体上的条码图像的范围。
44.s6:使用解码算法对所述对应区域进行尝试解码。因为所述对应区域包含完整的条码图像,所以可直接使用解码算法进行解析。相较于将整帧图像进行尝试解码,对所述对应区域进行尝试解码的方式大大减少了需要处理计算的数据量。
45.特别地,若解码失败,则使用所述解码算法对所述第一图像数据进行尝试解码。为了确保不遗漏图像中存在的条码,当解码失败时对整帧图像数据进行尝试解码,相较于再次重新从头执行而言,能够尽可能节约运行资源。
46.上述内容还存在以下可进一步优化提升的细节:
47.1、由于扫描条码时一般会将条码载体置于图像采集器视场中间的位置,因此在已知扫描单个条码时,只选取所述第二图像数据中靠近图像帧中间的区域,能够提升解码成功的概率,加快工作运行的速率。
48.2、由于扫描条码时一般会将条码载体置于距离图像采集器较近的位置,在已知扫描单个条码时,选取所述第二图像数据中的具有最小深度信息的区域,能够提升解码成功的概率,加快工作运行的速率。
49.3、所述第二图像数据中可以确定出多个具有相同深度信息的区域,对所有区域进行尝试解码,能够确保当存在多个物体上均有条码的情况时,多个条码能够被有效识别处理。
50.本实施例中一种分区域解码的方法,通过深度图像确定条码载体的具体区域,减少被解码的数据量,避免色彩图像质量不佳造成图像边缘提取失败等问题;解码失败时再
对整帧色彩图像进行解码,尽可能减少回滚操作,节约运行资源;根据解码时的特点,例如条码载体会置于设备最近的位置、会置于摄像头视场靠近中心位置等,对特定位置范围的区域进行解码,加快运行速率,提升解码成功概率;通过深度图像确定出多个区域,对色彩图像对应的多个区域进行解码,实现多条码的快速识别处理。
51.实施例二
52.一种分区域解码的条码阅读设备,系统框图如图2所示,包括处理器1、存储器2、按键3、指示灯4、蜂鸣器5、通信接口6、第一摄像头7、第二摄像头8,其中所述存储器2中存有软件程序,所述软件程序适于由处理器1加载运行。设备上电后,处理器1加载运行软件程序,条码阅读设备在软件程序的控制下开始运作,整个系统的运行包括以下内容:
53.第一摄像头7获取第一图像数据,所述第一图像数据中每个像素值表示色彩信息,图像记录的场景中包含条码。所述色彩信息是指像素的值是使用rgb、yuv等色彩空间作为表示的格式,所述第一图像数据可以是彩色图、黑白图等。所述第一摄像头7可以选用豪威的ov2640,支持输出最大为200万像素的图像,支持使用vga时序输出图像数据,输出图像的数据格式支持yuv422、yuv420、ycbcr422、rgb565以及jpeg格式。
54.第二摄像头8获取第二图像数据,所述第二图像数据中每个像素值表示深度信息,图像记录的场景与所述第一图像数据相同。所述深度信息是指将从图像采集器到场景中各点的距离作为像素的值,深度图像一般以灰度图的形式呈现,不同的灰度代表不同的深度值。所述第二摄像头8可以选用德州仪器的opt8241,能够以高达每秒150帧的帧速率提供四分之一的视频图形阵列分辨率数据。
55.处理器1建立像素间映射关系,所述映射关系是指所述第一图像数据中的像素与所述第二图像数据中的像素之间的对应关系。色彩图像与深度图像经过图像配准算法处理后可以形成像素间的对应关系,所述图像配准算法可以采用基于特征图像配准、基于灰度图像配准、基于变换域图像配准等算法,经配准后,所述第一图像数据中每个像素的深度信息可以在所述第二图像数据中确定,所述第二图像数据中每个像素的色彩信息可以在所述第一图像数据中确定。所述处理器1可以选用基于arm架构的处理器、基于x86架构的处理器、基于mips架构的处理器、dsp、fpga等具有程序处理功能的处理器。
56.处理器1选取所述第二图像数据中的部分区域,所述部分区域具有相同的深度信息。场景中不同物体在二维平面图像中所占据的区域范围在深度图中表现为相同灰度所圈定的区域,通过在深度图像中确定出一个由相同灰度组成的区域,可以确保物体的深度信息完整地存在于该区域中。
57.处理器1选取所述部分区域在所述第一图像数据中的对应区域,所述对应区域根据所述像素间映射关系得到。由于所述第一图像数据与所述第二图像数据存在对应关系,因此可以根据所述第二图像数据中确定出的部分区域确定出所述第一图像数据中的与之对应的区域,所述对应区域将包含完整的物体图像,从而确定了附着在物体上的条码图像的范围。
58.处理器1使用解码算法对所述对应区域进行尝试解码。因为所述对应区域包含完整的条码图像,所以可直接使用解码算法进行解析。相较于将整帧图像进行尝试解码,对所述对应区域进行尝试解码的方式大大减少了需要处理计算的数据量。
59.特别地,若解码失败,则使用所述解码算法对所述第一图像数据进行尝试解码。为
了确保不遗漏图像中存在的条码,当解码失败时对整帧图像数据进行尝试解码,相较于再次重新从头执行而言,能够尽可能节约运行资源。
60.上述内容还存在以下可进一步优化提升的细节:
61.1、由于扫描条码时一般会将条码载体置于图像采集器视场中间的位置,因此在已知扫描单个条码时,只选取所述第二图像数据中靠近图像帧中间的区域,能够提升解码成功的概率,加快工作运行的速率。
62.2、由于扫描条码时一般会将条码载体置于距离图像采集器较近的位置,在已知扫描单个条码时,选取所述第二图像数据中的具有最小深度信息的区域,能够提升解码成功的概率,加快工作运行的速率。
63.3、所述第二图像数据中可以确定出多个具有相同深度信息的区域,对所有区域进行尝试解码,能够确保当存在多个物体上均有条码的情况时,多个条码能够被有效识别处理。
64.本实施例中一种分区域解码的条码阅读设备,通过深度图像确定条码载体的具体区域,减少被解码的数据量,避免色彩图像质量不佳造成图像边缘提取失败等问题;解码失败时再对整帧色彩图像进行解码,尽可能减少回滚操作,节约运行资源;根据解码时的特点,例如条码载体会置于设备最近的位置、会置于摄像头视场靠近中心位置等,对特定位置范围的区域进行解码,加快运行速率,提升解码成功概率;通过深度图像确定出多个区域,对色彩图像对应的多个区域进行解码,实现多条码的快速识别处理。
65.显然,上述实施例仅仅是为清楚地说明所作出的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以作出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1