一种双弹性杆自动收拢结构的仿真分析方法
1.本发明涉及一种双弹性杆自动收拢结构的仿真分析方法,弹性杆是应用于航天领域的圆弧截面杆状结构。
背景技术:
2.空间可展结构是一类用于解决结构本身尺寸需求与运载工具有效载荷舱容积限制而发展起来的复杂宇航结构,其特点在于结构空间体系的转化和形体尺寸大变化。当航天器工作阶段时处于展开状态,要自动返回或被回收时,则结构可先行折叠收拢,减小空间体积。
3.弹性杆伸展臂作为一类空间可展开结构,其具有结构简单、收纳率较高和可重复展开等特点。伸展臂作为支承受力结构性元件,应用于大型空间可展天线、太阳电池阵、空间平台等,可实现空间折叠和展开功能。弹性杆展开后稳定工作状态为圆弧截面,其收展过程:弹性杆受外载荷作用成为扁平状,在卷筒带动下弯曲缠绕收拢;打开卷筒锁定,弹性杆释放变形产生的应变能而逐渐回弹展开。现阶段空间可展结构向多功能、多任务、综合性方向发展,随之结构尺寸与质量也迅速增大,对其仿真分析显得格外重要。弹性杆缠绕过程数值仿真分析方法和缠绕过程力学性能的分析,可为缠绕弹性杆截面设计、系统样机设计提供参考。
技术实现要素:
4.本发明的目的是:为了保证航天领域弹性杆空间可展结构工作的可靠性,在保证经济效益的同时,了解系统结构的整个工作运行,本发明设计了一种双弹性杆自动收拢结构的仿真分析方法。为了进一步设计弹性杆空间可展结构的整体结构,本发明采用abaqus仿真软件,以弹性杆在太空实际的工作情况为依据,仿真模拟了弹性杆缠绕的动态过程,得到的结果不仅具有较高的可信度,为实际工作带来重要的参考价值。
5.本发明采用的技术方案为:一种双弹性杆自动收拢结构的仿真分析方法,包括以下步骤:
6.一种双弹性杆自动收拢结构的仿真分析方法,双弹性杆受到驱动载荷作用的整个缠绕工作过程如下:第一弹性杆1和2的初始展开状态是圆弧状,通过中心卷筒压片9的压平,可以实现弹性杆连接到卷筒8之上;卷筒带动弹性杆向内转动缠绕,受到挡圈5对轴向位移的约束,依次通过外部导向轮6和外导槽3,双弹性杆实现交替缠绕。整个缠绕过程的仿真过程,包括以下步骤:
7.(1)几何模型简化:
8.整个双弹性杆缠绕的几何模型简化为以下部件:第一弹性杆1、第二弹性杆2、导槽3、挡圈5、外部导向轮6、卷筒8。
9.(2)分析步确定:
10.①
拉扁:弹性杆前端划分出用于连接部分的截面,该区域施加对向的位移边界条
件,使其完全成扁平状;
11.②
缠绕:卷筒施加恒定的转动速度,弹性杆经过外部导槽和周向分布的导轮逐渐运动,实现匀速的缠绕过程。
12.(3)确定各部件相互作用:
13.第一弹性杆1和2通过卷筒压片实现与卷筒的连接,外部导槽和周向分布的导轮实现对弹性杆周向的限制,挡圈实现弹性杆轴向的约束。
14.在弹性杆拉扁和缠绕的过程中,模型的各部件相互之间都存在接触和摩擦的情况。接触属性的切向属性设置为罚约束,其根据实际的接触情况定义罚系数,法向属性设置为硬接触。不同的部件之间定义不同的面对面接触,采用有限滑移的方法作用于各分析步。
15.采用运动耦合约束(*kinematic coupling)建立弹性杆扁平一端与参考点的相互作用,使扁平段所有节点转动自由度和参考点进行自由度耦合;弹性杆参考点与卷筒参考点之间建立铰链连接截面,实现卷筒对弹性杆的连接控制。
16.对外部导轮、导槽和挡圈施加刚体约束(*rigid body),不考虑相应部分的变形。刚体的运动完全取决于其控制点的运动,并且各导向机构和卷筒作为考虑接触过程中的接触主面。
17.弹性杆端部水平段与卷筒使用绑定(*tie)连接的相互作用,用来模拟两部件之间实际的连接关系。
18.(4)边界条件施加:
19.依据弹性杆可展结构实际的收拢工作机理,对其收缩缠绕过程中的各部件施加相应的边界条件。
20.在拉扁过程的分析步中,弹性杆端部截面两侧施加方向相反的位移,使圆弧面弹性变形直至完全成为扁平状。随着载荷的施加过程,弹性杆与卷筒的接触面逐渐增大。在缠绕过程的分析步中,卷筒只施加轴向的均匀角速度,其余各自由度完全约束。
21.在整个拉扁和缠绕过程的分析步中,周向导向轮、导槽和挡圈固定不动,对其六个自由度实现完全约束。
22.(5)网格划分:
23.由于通用4节点线性减缩积分壳单元s4r性能稳定,适用于结构的大变形问题,因此采用s4r壳单元建立弹性杆有限元模型。
24.(6)有限元分析求解:
25.本计算模型涉及多体连接缠绕过程中发生的弹性杆大变形问题,采用显示动力法进行求解计算,用于模拟复杂的几何非线性情况。
26.(7)计算结果评估与修正:
27.结合缠绕过程的力学知识,对有限元仿真计算结果的应力和能量进行评价及误差分析,若仿真结果出现不收敛,则重新确定分析步、各部件相互作用、边界条件的施加这些仿真相关设置。
28.其中,弹性杆缠绕过程存在两个圆弧形截面的杆之间的相互作用,卷筒转动可以实现两个弹性杆的缠绕过程,收拢的效率更高。
29.其中,仿真过程中使用拉扁分析步来实现卷筒压片的作用。
30.其中,采用显示动力法进行模型的求解计算,用于解决多体连接缠绕过程中发生
的弹性杆大变形问题。
31.本发明相比现有技术的优点在于:
32.(1)本发明采用abaqus软件对弹性杆空间可展结构的收缩过程进行精确分析和数值模拟方法进行阐述,使得求解结果更接近真实情况;
33.(2)本发明最终结果进行不断优化与归纳总结,可对结构分析方法、构型的创新进行突破,期望对以后的研究有所帮助。
附图说明
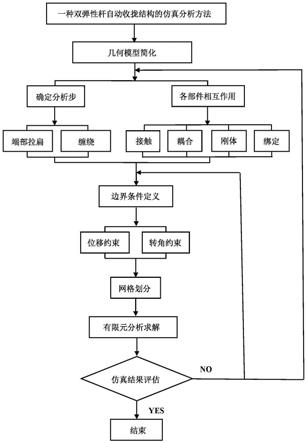
34.图1为本发明方法流程图
35.图2为弹性杆几何模型图
36.图3为双弹性杆可展结构的整体装配图
37.图4为双弹性杆可展结构的弹性杆连接装配图
38.图5为双弹性杆缠绕仿真有限元模型图
具体实施方式
39.下面结合附图和具体实施方式对本发明进一步说明。
40.如图1所示,双弹性杆收拢结构的仿真分析方法主要包括几何模型的简化、分析步确定、确定各部件相互作用、边界条件施加、网格划分和有限元分析求解组成。
41.如图2所示,第一弹性杆1和第二弹性杆2的初始展开状态是一种薄壁圆弧壳结构,结构形式简单,它可以利用折叠变形时积聚的弹性应变能实现自身的展开。
42.图3和图4中弹性杆收拢结构的装配图显示,主要部件包括:第一弹性杆1、第二弹性杆2、导槽3、外壳体4、挡圈5、外部导向轮6、固定螺钉7、卷筒8和卷筒压片9。双弹性杆受到驱动载荷作用的整个缠绕工作过程如下:第一弹性杆1和2通过中心卷筒压片9的压平,可以实现弹性杆连接到卷筒8之上,卷筒的转动带动弹性运动。弹性杆整体的缠绕过程中受到挡圈5对轴向位移的约束,外部导向轮6和外导槽7对周向位移的约束。
43.图5所示双弹性杆收拢结构的简化的有限元模型包括以下部件:第一弹性杆1、第二弹性杆2、导槽3、挡圈5、外部导向轮6、卷筒8。根据双弹性杆收拢结构实际工作方式进行仿真分析的相关设置。
44.本发明未详细阐述的部分属于本领域公知技术。
45.以上所述,仅为本发明中的部分具体实施方式,但本发明的保护范围并不局限于此,凡是依据本发明中的设计精神所做出的等效变化或修饰或等比例放大或缩小等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1