一种基于机械导纳的鞋底足跟区减振结构优化设计方法
1.本发明涉及振动分析领域,具体涉及一种多胞结构鞋底振动能量传递评估方法。
背景技术:
2.来自足部传入到人体的振动会对人体造成严重的损伤,而鞋底作为隔绝地面冲击振动与人体足部的减振结构能够起到减振作用。多胞结构因其具有优良的减振性能被广泛应用于鞋底,而基于鞋底的研究大都采用试验的方法,不仅成本高、试验周期也很长,费时费力。
技术实现要素:
3.本发明的主要目的在于克服现有技术中的上述缺陷,提出一种基于机械导纳的鞋底足跟区减振结构优化设计方法,借助于数值建模和有限元分析的方法,不仅可以研究振动在多胞结构鞋底中的响应及传递情况,还能为制鞋业与脚用个人防护设备的开发提供指导。
4.本发明解决这些技术问题所采用的技术方案是:一种基于机械导纳的鞋底足跟区减振结构优化设计方法,包括如下步骤:
5.步骤s1,在ug中建立优化前简化的鞋底三维实体模型;
6.步骤s2,以鞋底足跟区作为优化设计区域,将不同晶格类型的多胞结构填充入鞋底足跟区,得到不同晶格类型的多胞结构鞋底;
7.步骤s3,在有限元分析软件abaqus中构建所述多胞结构鞋底的有限元模型;
8.步骤s4,对多胞结构鞋底进行稳态动力学分析,获得其对振动的响应情况;
9.步骤s5,利用python编程语言绘制多胞结构鞋底下表面等效机械导纳分布云图及多胞结构下表面等效机械导纳的平均值;
10.步骤s6,重复所述步骤s3
‑
s5,得到不同晶格类型的多胞结构鞋底的等效机械导纳分布云图及鞋底下表面等效机械导纳的平均值;
11.步骤s7,对比不同晶格类型多胞结构鞋底的等效机械导纳分布云图并绘制不同晶格类型多胞结构鞋底下表面等效机械导纳平均值对比的柱状图,得到最优的鞋底足跟区减振结构鞋底模型。
12.在一较佳实施例中:所述步骤s2具体包括:
13.步骤s21:构建不同晶格类型的多胞结构,包括cross型、diamond型、grid型、star型、x型;
14.步骤s22,以鞋底足跟区作为优化设计区域,将不同晶格类型的多胞结构填充入鞋底足跟区域,得到不同晶格类型的多胞结构鞋底。
15.在一较佳实施例中:所述步骤s3具体包括:
16.步骤s31:将所述多胞结构鞋底模型导入abaqus有限元软件中;
17.步骤s32:将多胞结构鞋底按照解剖学原理划分区域:将多胞结构鞋底分为足跟
区、足弓区、跖骨区、趾骨区四个大的区域,其中足跟区包括足跟内侧区hm、足跟外侧区hl,足弓区包括足弓内侧区mf1、足弓外侧区mf2,跖骨区包括第一跖骨区m1、第二、三跖骨区m23、第四、五跖骨区m45,趾骨区包括第一趾骨区t1、第二
‑
五趾骨区t25共9个区域;
18.步骤s33:对所述步骤s32中的多胞结构鞋底赋予材料属性、施加边界条件、划分网格单元,得到多胞结构鞋底的有限元模型。
19.在一较佳实施例中:所述步骤s4具体包括:
20.步骤s41:对所述多胞结构鞋底的有限元模型在0
‑
360hz频率范围内进行有限元模态分析,获得其固有振动特性;
21.步骤s42,基于有限元模态分析的结果,对多胞结构有限元模型施加单位简谐激励力,并进行基于模态的稳态动力学分析,获得其对振动的响应结果;
22.步骤s43,在abaqus中设置历史输出变量为多胞结构鞋底下表面各节点的z方向速度v3,输出各节点速度到结果文件.odb文件中。
23.在一较佳实施例中:所述步骤s5具体包括:
24.步骤s51:利用python编程语言从abaqus结果文件.odb文件中读取各节点在1
‑
360hz频率范围内的速度数据;
25.步骤s52:根据多胞结构鞋底下表面各节点的速度数据,及对多胞结构鞋底施加的单位简谐激励力数据,由等效机械导纳计算公式计算并获得多胞结构鞋底下表面各节点在1
‑
360hz范围内的等效机械导纳数据;
26.步骤s53:求取多胞结构下表面各节点在1
‑
360hz频率范围内等效机械导纳的平均值,并将其存入表格文件.csv文件中;
27.步骤s54:利用python编程语言读取表格文件.csv文件中的多胞结构鞋底下表面等效机械导纳平均值的数据,并绘制鞋底下表面等效机械导纳分布云图;
28.步骤s55:求取多胞结构鞋底下表面等效机械导纳的平均值,作为衡量多胞结构鞋底减振性能的评价指标。
29.在一较佳实施例中:所述步骤s7具体包括:
30.步骤s71:根据所述不同晶格类型的多胞结构鞋底下表面等效机械导纳的平均值,在python中绘制不同晶格类型多胞结构鞋底等效机械导纳平均值对比的柱状图;
31.步骤s72:根据不同晶格类型的多胞结构鞋底的等效机械导纳分布云图,并结合其等效机械导纳平均值对比的柱状图,优选出一种减振性能最优的鞋底足跟区减振结构鞋底模型。
32.相较于现有技术,本发明的技术方案具备以下有益效果:
33.1)本发明方法中,对模型的质量密度、杨氏模量和泊松比分别进行赋值,使模型与实物的材质相同,从而达到仿真的目的;
34.2)本发明方法中,采用等效机械导纳云图与等效机械导纳对比的柱状图来共同评估鞋底减振效果,从定性与定量两方面来评估,评估效果更加清晰有效;
35.3)本发明方法中,优选了出一种减振性能优良的鞋底足跟区减振结构鞋底模型。
附图说明
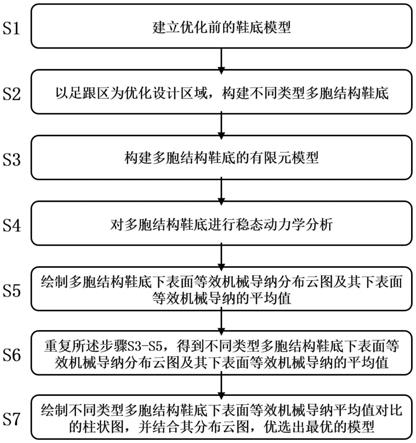
36.图1为本发明方法的主要步骤流程示意图;
37.图2为优化前的鞋底三维实体模型图;
38.图3(a)为cross型多胞结构鞋底;
39.图3(b)为diamond型多胞结构鞋底;
40.图3(c)为grid型多胞结构鞋底;
41.图3(d)为star型多胞结构鞋底;
42.图3(e)为x型多胞结构鞋底;
43.图4为鞋底区域划分图;
44.图5为足后跟激励工况下多胞结构鞋底有限元模型图;
45.图6(a)为cross型多胞结构鞋底下表面等效机械导纳分布云图;
46.图6(b)为diamond型多胞结构鞋底下表面等效机械导纳分布云图;
47.图6(c)为grid型多胞结构鞋底下表面等效机械导纳分布云图;
48.图6(d)为star型多胞结构鞋底下表面等效机械导纳分布云图;
49.图6(e)为x型多胞结构鞋底下表面等效机械导纳分布云图;
50.图7为不同晶格类型的多胞结构鞋底下表面等效机械导纳平均值对比的柱状图;
51.图8为本发明优选实施例中最优的模型图。
具体实施方式
52.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
53.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
54.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是壁挂连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
55.一种基于机械导纳的鞋底足跟区减振结构优化设计方法,如图1所示,包括:
56.步骤s1,在ug中建立优化前简化的鞋底三维实体模型,如图2所示;
57.步骤s2,以鞋底足跟区作为优化设计区域,将不同类型多胞结构填充入鞋底足跟区,得到不同晶格类型的多胞结构鞋底,具体包括:
58.步骤s21:构建不同晶格类型的多胞结构,包括cross型、diamond型、grid型、star型、x型;
59.具体的,基于grasshopper和ug二次开发构建胞元大小为8mm、杆直径为2mm,长宽高为48mm
×
64mm
×
16mm的五种晶格类型的多胞结构,晶格类型包括cross型、diamond型、
grid型、star型、x型。
60.步骤s22,以鞋底足跟区作为优化设计区域,将不同晶格类型的多胞结构填充入鞋底足跟区域,得到不同晶格类型的多胞结构鞋底;
61.具体的,cross型多胞结构鞋底如图3(a)所示,diamond型多胞结构鞋底如图3(b)所示,grid型多胞结构鞋底如图3(c)所示,star型多胞结构鞋底如图3(d)所示,x型多胞结构鞋底如图3(e)所示。
62.步骤s3,在有限元分析软件abaqus中构建所述步骤s2中多胞结构鞋底的有限元模型,具体包括:
63.步骤s31:将所述步骤s22中的多胞结构鞋底模型导入abaqus有限元软件中;
64.步骤s32:将多胞结构鞋底按照解剖学原理划分区域;
65.具体的,将多胞结构鞋底分为足跟区、足弓区、跖骨区、趾骨区四个大的区域,其中足跟区包括足跟内侧区hm、足跟外侧区hl,足弓区包括足弓内侧区mf1、足弓外侧区mf2,跖骨区包括第一跖骨区m1、第二、三跖骨区m23、第四、五跖骨区m45,趾骨区包括第一趾骨区t1、第二
‑
五趾骨区t25共9个区域,如图4所示。
66.步骤s33:对所述步骤s32中的多胞结构鞋底赋予材料属性、施加边界条件、划分网格单元,得到多胞结构鞋底的有限元模型。
67.具体的,材料属性包括:鞋底密度为1230kg/m3,弹性模量为4mpa,泊松比为0.4,材料阻尼为0.1;鞋底边界条件为无约束的自由边界条件;划分网格单元时的单元尺寸为4mm。
68.步骤s4,对多胞结构鞋底进行稳态动力学分析,获得其对振动的响应情况,具体包括:
69.步骤s41:对所述步骤s33中的多胞结构有限元模型在0
‑
360hz频率范围内进行有限元模态分析,获得其固有振动特性;
70.步骤s42,基于步骤s41所述的有限元模态分析结果,对多胞结构有限元模型施加单位简谐激励力,并进行基于模态的稳态动力学分析,获得其对振动的响应结果;
71.具体的,对多胞结构鞋底施加的激励力是频率在1
‑
360hz频率范围内逐一增加、幅值为1n、方向为z方向向下的单位简谐激励力,其施加在多胞结构鞋底足后跟圆形区域,如图5所示。
72.步骤s43,在abaqus中设置历史输出变量为多胞结构鞋底下表面各节点的z方向速度v3,输出各节点速度到结果文件.odb文件中。
73.步骤s5,利用python编程语言绘制多胞结构鞋底下表面等效机械导纳分布云图及多胞结构下表面等效机械导纳的平均值,具体包括:
74.步骤s51:利用python编程语言从abaqus结果文件.odb文件中读取各节点在1
‑
360hz频率范围内的速度数据;
75.步骤s52:根据多胞结构鞋底下表面各节点的速度数据,及对多胞结构鞋底施加的单位简谐激励力数据,由等效机械导纳计算公式计算并获得多胞结构鞋底下表面各节点在1
‑
360hz范围内的等效机械导纳数据;
76.步骤s53:求取多胞结构下表面各节点在1
‑
360hz频率范围内等效机械导纳的平均值,并将其存入表格文件.csv文件中;
77.步骤s54:利用python编程语言读取表格文件.csv文件中的多胞结构鞋底下表面
等效机械导纳平均值的数据,并绘制鞋底下表面等效机械导纳分布云图;
78.步骤s55:求取多胞结构鞋底下表面等效机械导纳的平均值,作为衡量多胞结构鞋底减振性能的评价指标。
79.步骤s6,重复所述步骤s3
‑
s5,得到不同晶格类型的多胞结构鞋底的等效机械导纳分布云图及鞋底下表面等效机械导纳的平均值。
80.具体的,cross型多胞结构鞋底下表面等效机械导纳分布云图如图6(a)所示,diamond型多胞结构鞋底下表面等效机械导纳分布云图如图6(b)所示,grid型多胞结构鞋底下表面等效机械导纳分布云图如图6(c)所示,star型多胞结构鞋底下表面等效机械导纳分布云图如图6(d)所示,x型多胞结构鞋底下表面等效机械导纳分布云图如图6(e)所示。
81.步骤s7,对比不同晶格类型的多胞结构鞋底的等效机械导纳分布云图并绘制不同晶格类型的多胞结构鞋底下表面等效机械导纳平均值对比的柱状图,选择其中一种最优的模型,作为最优的鞋底足跟区减振结构鞋底模型,具体包括:
82.步骤s71:根据所述步骤s6中不同晶格类型的多胞结构鞋底下表面等效机械导纳的平均值,在python中绘制不同晶格类型的多胞结构鞋底等效机械导纳平均值对比的柱状图;
83.步骤s72:根据不同晶格类型的多胞结构鞋底的等效机械导纳分布云图,并结合其等效机械导纳平均值对比的柱状图,优选出一种减振性能最优的鞋底足跟区减振结构鞋底模型,如图7所示。本实施例,最终选出的鞋底足跟区减振结构鞋底模型,其多胞结构为star型晶格,胞元尺寸为8mm,杆直径为3mm,长宽高为48mm
×
64mm
×
16mm填充入鞋底足后跟区域,如图8所示。
84.以上所述,仅为本发明较佳的具体实施方式,但本发明的设计构思并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,利用此构思对本发明进行非实质性的改动,均属于侵犯本发明保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1