以全视场椭率最小为校正目标的空间望远镜在轨调校方法
1.本发明属于在轨光学调校技术领域,具体涉及一种以全视场椭率最小为校正目标的空间望远镜在轨调校方法。
背景技术:
2.大口径天文望远镜对于我国科技进步与社会发展具有重要的战略性意义,其不仅是研究宇宙演化、生命起源、暗物质与暗能量本质等一系列重大前沿科学问题的关键设备,而且可为光电领域原始创新提供重要驱动力,牵引若干前沿技术及其产业的快速发展。
3.空间望远镜点扩散函数椭率对于暗物质、暗能量探究具有重要意义。暗物质与暗能量不会吸收、发射或者辐射光,无法直接观测,只能利用弱引力透镜效应进行间接观测,而当前弱引力透镜效应的强弱主要利用天体或星系椭率的改变量进行衡量。所以,对宇宙中天体或星系椭率的准确测量对于暗物质与暗能量的观测和研究具有重要意义。
4.弱引力透镜效应对天体或星系椭率的影响很微弱,若要对其进行准确测量,需光学系统自身所引起椭率的变化限定在一个很小的范围内,尽量减小光学系统自身椭率对暗物质、暗能量观测的影响。光学系统自身椭率主要由光学系统自身波像差引起,一般而言,波像差越小,点扩散函数椭率就越小。然而,光学系统“全视场波像差最优”与“全视场点扩散函数椭率最优”本质上对应两个不同的系统状态,不能混为一谈。
5.传统空间望远镜在轨光学调校往往以“全视场波像差最优”为校正目标,而校正波像差之后椭率性能并非最优。因此有必要针对空间望远镜不同的天文学观测需求,制定不同的校正目标。具体而言,在观测暗物质、暗能量时,采用“全视场点扩散函数椭率最优”模式,让光学系统自身引起点扩散函数椭率尽量小,更好地对暗物质、暗能量引起的弱引力透镜效应进行识别与判断。
6.目前,关于以全视场点扩散函数椭率最小为校正目标的空间望远镜在轨光学调校方法的研究还未见报道。
技术实现要素:
7.为了解决如何在轨对空间望远镜全视场点扩散函数椭率进行最优化校正的问题,本发明提供一种以全视场椭率最小为校正目标的空间望远镜在轨调校方法,对空间望远镜全视场点扩散函数的椭率进行最优化校正。
8.本发明为解决技术问题所采用的技术方案如下:
9.本发明的以全视场椭率最小为校正目标的空间望远镜在轨调校方法,包括以下步骤:
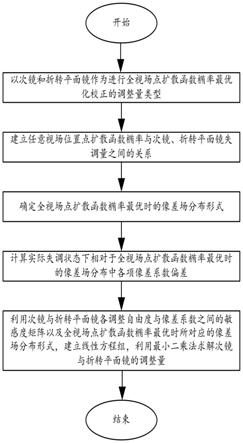
10.步骤一、以次镜和折转平面镜作为进行全视场点扩散函数椭率最优化校正的调整量类型;
11.步骤二、建立任意视场位置点扩散函数椭率与次镜、折转平面镜失调量之间的关系;
12.步骤三、确定全视场点扩散函数椭率最优时的像差场分布形式;
13.步骤四、计算实际失调状态下相对于全视场点扩散函数椭率最优时的像差场分布中各项像差系数偏差;
14.步骤五、利用次镜与折转平面镜各调整自由度与像差系数之间的敏感度矩阵以及全视场点扩散函数椭率最优时所对应的像差场分布形式,建立线性方程组,利用最小二乘法求解次镜与折转平面镜的调整量。
15.进一步的,步骤二的具体过程如下:
16.(1)任意视场位置波像差系数与次镜、折转平面镜失调量之间关系的建立
17.根据矢量像差理论,由失调引起各主要像差系数的净改变量随视场线性分布,因此由失调引起的像差系数净变化量表示为视场二维坐标的线性函数:
[0018][0019]
其中,表示视场位置坐标,δc
j
(h
x
,h
y
)为视场位置坐标处由失调引起的第j项像差系数改变量,v=[v1,v2,v3,...v
m
]
t
表示由m项失调自由度代表的失调量向量,p
j
(v)、q
j
(v)以及o
j
(v)为相应的线性相关系数;
[0020]
在失调状态下,特定视场波像差初始像差和失调产生的部分,第j项像差系数表示为:
[0021][0022]
其中,表示设计状态下的像差系数值;为视场位置坐标处由失调引起的像差系数改变量;
[0023]
(2)任意视场位置点扩散函数椭率与次镜、折转平面镜失调量之间关系的建立
[0024]
视场位置坐标处的波像差w表示为各单项像差的线性叠加:
[0025][0026]
其中,z
j
表示第j项泽尼克多项式所对应的数据矩阵;w与z
j
均为矩阵,分别表示波像差和某一项泽尼克多项式在光瞳面的二维分布。
[0027]
系统失调量向量为v时,视场位置坐标处的点扩散函数图像表示为:
[0028][0029]
其中,i表示视场位置坐标处的点扩散函数图像,其为二维矩阵,包含点斑图像灰度信息;i表示虚数单位;λ表示波长;ft
‑1表示逆傅里叶变换;p为一个二维矩阵,表示出瞳面的强度分布。
[0030]
进一步的,步骤三的具体过程如下:
[0031]
(1)确定点扩散函数椭率的计算公式
[0032]
系统失调量向量为v时,视场位置坐标处的点扩散函数椭率的两个分量分别定义为:
[0033][0034]
其中,q
xx
、q
yy
与q
xy
分别为点扩散函数图像i的三项二阶矩,其公式分别如下:
[0035][0036]
其中,(x,y)表示点扩散函数图像i的两个维度的坐标,w(x,y)表示高斯加权系数,用于降低噪声对于椭率计算的影响,与分别表示点扩散函数图像i两个维度的质心坐标;
[0037]
系统失调量向量为v时,视场位置坐标处的点扩散函数椭率的大小为两个分量的合成:
[0038][0039]
(2)目标函数的建立与全视场点扩散函数椭率最优时所对应的像差场分布形式的求解
[0040]
以全视场点扩散函数椭率平均值为目标函数,表示为失调量的函数:
[0041][0042]
其中,k表示视场采样点的个数;
[0043]
利用数值最优化工具得到e取最小值时的失调量v0,即:
[0044]
e(v0)=min{e(v)}
ꢀꢀꢀ
(9)
[0045]
失调量v0所对应的像差场分布即为全视场点扩散函数椭率最优时所对应的像差场分布,简化表示为:
[0046]
[0047]
其中,表示失调量v0所对应的像差场分布中特定视场位置坐标处第j项像差系数的大小。
[0048]
进一步的,步骤五的具体过程如下:
[0049]
(1)次镜与折转平面镜调整量的求解
[0050]
次镜与折转平面镜失调量变化量与波像差变化量之间的线性关系表示为:
[0051]
aδv=δc
ꢀꢀꢀ
(11)
[0052]
其中,a为失调量向量的敏感度矩阵,包含不同视场位置各波像差系数对于各单项失调量的敏感度,δv为失调量变化量向量,δc为相应视场位置像差系数变化量向量;
[0053]
空间望远镜在轨进行光学调校时,会测量几个视场波像差系数,在此基础上,得到当前失调状态相对于全视场点扩散函数椭率最优像差场变化量为:
[0054]
δc=c'
‑
c
(p)
ꢀꢀꢀ
(12)
[0055]
其中,向量c'包含实际测量的几个特定视场各项主要像差系数值,向量c
(p)
包含全视场点扩散函数椭率最优像差场条件下几个对应视场各项主要像差系数值,向量δc即为几个特定视场位置处当前失调状态相对于全视场点扩散函数椭率最优像差场变化量;
[0056]
次镜与折转平面镜调整量向量表示为:
[0057]
δv=(a
t
a)
‑1a
t
(c'
‑
c
(p)
)
ꢀꢀꢀ
(13)
[0058]
其中,上标t表示转置,上标号
‑
1表示矩阵的逆。
[0059]
本发明的有益效果是:
[0060]
本发明的一种以全视场椭率最小为校正目标的空间望远镜在轨调校方法,首先,确定次镜与折转平面镜作为全视场椭率最优化校正的可调整自由度;其次,以全视场椭率平均值为目标函数,以次镜、折转平面镜失调量为自变量,利用数值最优化手段,确定全视场椭率最优时所对应的像差场分布形式;最后,根据所确定的全视场椭率最优像差场分布,利用敏感度矩阵法求解次镜与折转平面镜的调整量。
[0061]
本发明的一种以全视场椭率最小为校正目标的空间望远镜在轨调校方法,具有计算简便、调校精度高、工程代价低等优点,在实现全视场点扩散函数椭率最优化校正的同时,提高了空间望远镜在轨光学调校的可实现性,对于未来的大口径天文望远镜的发展具有重要意义。
附图说明
[0062]
图1本发明的一种以全视场椭率最小为校正目标的空间望远镜在轨调校方法流程图。
具体实施方式
[0063]
如图1所示,本发明的一种以全视场椭率最小为校正目标的空间望远镜在轨调校方法,主要包括以下步骤:
[0064]
步骤一、选择合适的调整量类型
[0065]
当前空间望远镜一般都配备次镜与折转平面镜。一方面,次镜为当前两反、三反望远镜的必需部件;另一方面,空间望远镜一般都需要利用折转平面镜进行稳像、调焦或者模
块切换。
[0066]
从物理上来讲,在确定光学系统参数(包括基本设计参数与面形误差参数等)的情况下,存在一组次镜与折转平面镜的调整量,使得全视场点扩散函数椭率最优,换言之,全视场点扩散函数椭率最优所对应的像差场分布客观存在。空间望远镜的可调整自由度有限,本发明提出以次镜与折转平面镜作为进行全视场点扩散函数椭率最优化校正的调整量类型,能够实现全视场点扩散函数椭率最优化校正的同时,有效降低工程代价,提高在轨光学调校的可实现性。
[0067]
步骤二、建立任意视场位置点扩散函数椭率与次镜、折转平面镜失调量之间的关系。
[0068]
系统失调量与特定视场波像差、特定视场点扩散函数椭率之间的关系可通过数学公式进行描述,可建立全视场点扩散函数椭率与系统失调量之间的关系。
[0069]
具体流程如下:
[0070]
(1)任意视场位置波像差系数与次镜、折转平面镜失调量之间关系的建立
[0071]
根据矢量像差理论研究结论,由失调引起各主要像差系数的净改变量随视场线性分布(随视场坐标高阶变化的像差成分所占比重很小)。所以,由失调引起的像差系数净变化量可表示为视场二维坐标的线性函数:
[0072][0073]
其中,表示视场位置坐标,δc
j
(h
x
,h
y
)为视场位置坐标处由失调引起的第j项像差系数改变量(j=4,5,6,7,8分别表示离焦、0
°
像散、45
°
像散、0
°
彗差和90
°
彗差),v=[v1,v2,v3,...v
m
]
t
表示由m项失调自由度代表的失调量向量,p
j
(v)、q
j
(v)以及o
j
(v)为相应的线性相关系数。p
j
、q
j
以及o
j
均为失调量向量v的函数,一般也可近似为线性关系(线性系数与失调量无关,可从光学软件中获取)。
[0074]
在失调状态下,特定视场波像差可分为两部分,一部分为初始像差(光学设计残差),另一部分为失调产生的部分。第j项像差系数可以表示为:
[0075][0076]
其中,表示设计状态下的像差系数值,在光学系统确定之后,其为已知量,与失调量无关。为视场位置坐标处由失调引起的像差系数改变量。
[0077]
(2)任意视场位置点扩散函数椭率与次镜、折转平面镜失调量之间关系的建立
[0078]
某一视场位置坐标处波像差w表示为各单项像差的线性叠加:
[0079][0080]
其中,z
j
表示第j项泽尼克多项式所对应的数据矩阵,j一般取从4到9即可。此处w与z
j
都为矩阵,分别表示波像差和某一项泽尼克多项式在光瞳面的二维分布。
[0081]
系统失调量向量为v时,视场位置坐标处的点扩散函数图像可表示为:
[0082][0083]
其中,i表示视场位置坐标处的点扩散函数图像,其为二维矩阵,包含点斑图像灰度信息。i表示虚数单位。λ表示波长。ft
‑1表示逆傅里叶变换。p为一个二维矩阵,表示出瞳面的强度分布(归一化孔径内该矩阵元素值为1,其余为0)。
[0084]
步骤三、全视场点扩散函数椭率最优时像差场分布形式的确定
[0085]
针对地面仿真得到的在轨镜面失调与面形变化工况,以次镜与折转平面镜可调整自由度优化变量,以全视场点扩散函数椭率平均值为目标函数,进行寻优,求解全视场点扩散函数椭率平均值最小时所对应的次镜与折转平面镜调整量,进而求解全视场点扩散函数椭率最优时所对应的像差场分布形式。
[0086]
根据不同镜面失调量之间的像差补偿特性,即使在轨初始失调工况具有一定的随机性与不太确定性的情况下,在以次镜、折转平面镜为自变量,以全视场点扩散函数椭率平均值为目标函数进行优化时,最终求取的全视场点扩散函数椭率最优时所对应的像差场分布形式具有唯一性。
[0087]
具体流程如下:
[0088]
(1)确定点扩散函数椭率的计算公式
[0089]
系统失调量向量为v时,视场位置坐标处的点扩散函数椭率的两个分量分别定义为:
[0090][0091]
其中,q
xx
、q
yy
与q
xy
分别为点扩散函数图像i的三项二阶矩,其公式分别如下:
[0092][0093]
其中,(x,y)表示点扩散函数图像i的两个维度的坐标,w(x,y)表示高斯加权系数,用于降低噪声对于椭率计算的影响,与分别表示点扩散函数图像i两个维度的质心坐标。
[0094]
系统失调量向量为v时,视场位置坐标处的点扩散函数椭率的大小为两个分量的合成:
[0095][0096]
(2)目标函数的建立与全视场点扩散函数椭率最优时所对应的像差场分布形式的求解
[0097]
以全视场点扩散函数椭率平均值为目标函数,其可以表示为失调量的函数:
[0098][0099]
其中,k表示视场采样点的个数,可取5*5、7*7、9*9或者11*11,具体值取决于计算能力以及全视场点扩散函数椭率平均值计算精度的要求。
[0100]
利用数值最优化工具可以得到e取最小值时的失调量v0,即:
[0101]
e(v0)=min{e(v)}
ꢀꢀꢀ
(9)
[0102]
失调量v0所对应的像差场分布即为全视场点扩散函数椭率最优时所对应的像差场分布,简化表示为:
[0103][0104]
其中,表示失调量v0所对应的像差场分布中特定视场位置坐标处第j项像差系数的大小。
[0105]
步骤四、计算实际失调状态下相对于全视场点扩散函数椭率最优时的像差场分布中各项像差系数偏差。
[0106]
步骤五、实际应用中次镜与折转平面镜调整量的确定
[0107]
非线性优化是一种科学的确定全视场点扩散函数椭率最优状态的方法,在建立全视场点扩散函数椭率与系统失调量之间的关系基础上,可利用非线性优化手段寻找全视场点扩散函数椭率均值最小时所对应的系统失调量。
[0108]
实际在轨对空间望远镜进行光学调校的过程中,空间望远镜一般配备波前传感器,能够提供几个不同视场波像差系数检测值。在此基础上,利用从软件中得到的次镜与折转平面镜各调整自由度与像差系数之间的敏感度矩阵以及所确定的全视场点扩散函数椭率最优时所对应的像差场分布形式,建立线性方程组,利用最小二乘法求解次镜与折转平面镜的调整量。
[0109]
具体流程如下:
[0110]
(1)在轨进行椭率最优调整过程中,次镜与折转平面镜调整量的求解
[0111]
在轨失调状态未知的情况下,各镜面都有可能发生失调,但是,根据矢量像差相关理论,利用次镜与折转平面镜可以对其它镜面失调进行有效的补偿,于是,可以将其它镜面的失调等效为次镜与折转平面镜的失调。
[0112]
次镜与折转平面镜失调量变化量与波像差变化量之间的线性关系可以表示为:
[0113]
aδv=δc
ꢀꢀꢀ
(11)
[0114]
其中,a为失调量向量的敏感度矩阵,包含不同视场位置各波像差系数对于各单项失调量(即失调量向量v中各元素)的敏感度,δv为失调量变化量向量,δc为相应视场位置像差系数变化量向量(由各单项像差系数的变化量组成)。
[0115]
空间望远镜在轨进行光学调校时,一般会测量几个视场波像差系数,在此基础上,可得到当前失调状态相对于全视场点扩散函数椭率最优像差场变化量为:
[0116]
δc=c'
‑
c
(p)
ꢀꢀꢀ
(12)
[0117]
其中,向量c'包含实际测量的几个特定视场各项主要像差系数值,向量c
(p)
包含全视场点扩散函数椭率最优像差场条件下几个对应视场各项主要像差系数值,向量δc即为几个特定视场位置处当前失调状态相对于全视场点扩散函数椭率最优像差场变化量。
[0118]
次镜与折转平面镜调整量向量即可表示为:
[0119]
δv=(a
t
a)
‑1a
t
(c'
‑
c
(p)
)
ꢀꢀꢀ
(13)
[0120]
其中,上标t表示转置,上标号
‑
1表示矩阵的逆。向量δv为失调量变化量向量,即为从当前失调状态调整至全视场点扩散函数椭率最优状态所需的次镜与折转平面镜调整量。
[0121]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1