压缩空气供应装置和方法与流程
1.本发明涉及一种用于基于调节器参数执行调节、尤其是位置调节和/或压力调节的压缩空气供应装置。所述调节控制压缩空气的供应。
背景技术:
2.压缩空气供应装置包括例如阀岛(ventilinsel)并且尤其是用于提供伺服气动力学、即气动位置调节。该调节尤其是非线性调节。进行调节所基于的调节器参数(reglerparametern)例如是调节器增益。
3.为了获得良好的调节性能,调节器参数必须被适配于使用压缩空气供应装置的各自系统、即各自应用程序。
4.在对于使用压缩空气供应装置合适的系统、即应用程序中,存在物理特性(例如不同的质量和/或尺寸)的大的变化,所述物理特性在确定调节器参数时必须被考虑,以便获得良好的调节性能。
5.然而,压缩空气供应装置的用户通常不知道所述用户必须如何设定调节器参数来使调节适配于目前系统的物理特性。
技术实现要素:
6.本发明的任务在于,提供一种压缩空气供应装置,所述压缩空气供应装置使得能够简单地使调节器参数适配于各自系统。
7.该任务通过根据权利要求1所述的压缩空气供应装置解决。该压缩空气供应装置具有机器学习模型(machine-learning-modell)并且被构造用于在使用机器学习模型的情况下基于所输入的系统参数来提供调节器参数,并且基于所提供的调节器参数执行调节,其中所述系统参数描述应该使用压缩空气供应装置的系统的物理特性。
8.机器学习模型也可以被称为机械(maschinelles)学习模型,并且尤其是表示系统参数到调节器参数上的映射。尤其是,机器学习模型近似在系统参数和调节器参数之间的非线性关系。机器学习模型例如基于支持向量回归、回归树和/或人工神经网络。机器学习模型优选地基于回归方法。机器学习模型尤其是人工智能模型。
9.系统参数例如包括尺寸、体积、质量、摩擦、角度和/或压力。
10.尤其是,通过压缩空气供应装置变得可能的是,用户将系统参数输入到压缩空气供应装置中,用于使调节器参数适配于各自系统,并且然后压缩空气供应装置在使用机器学习模型的情况下独立地基于系统参数确定为了调节要使用的调节器参数。通常,用户知道其系统的系统参数或者可以以不大的耗费确定所述系统参数。优选地,为了适配调节器参数,用户仅必须输入系统参数。借助于机器学习模型提供的调节器参数适宜地用作用于目前系统、尤其是目前应用程序的默认参数化。
11.有利的改进方案是从属权利要求的主题。
12.本发明此外涉及一种用于运行压缩空气供应装置的方法,所述方法包括步骤:在
使用机器学习模型的情况下基于所输入的系统参数提供调节器参数并且基于所提供的调节器参数执行调节。
13.本发明此外涉及一种用于提供机器学习模型的方法,所述方法包括步骤:-针对由系统参数集和调节器参数集组成的多个集组合执行具有调节器和调节对象的系统的多个模拟,所述系统参数集描述系统的物理特性,调节器基于所述调节器参数集对调节对象执行调节,其中针对由系统参数集和调节器参数集组成的各自集组合执行每个模拟,-基于模拟,针对每个集组合计算各自调节成本值,-基于所计算的调节成本值选择集组合,-基于所选择的集组合来创建训练数据集,和-利用训练数据集对机器学习模型进行训练。
14.训练数据集优选地仅包含具有低调节成本值、即尤其是处于极限值、尤其是调节极限值之下的调节成本值的集组合。例如,训练数据集仅包括具有足够品质的集组合。
15.本发明此外涉及用于提供机器学习模型的另一方法,该另一方法包括步骤:-在使用机器学习模型的情况下,基于系统参数集提供调节器参数集,所述系统参数集描述具有调节器和调节对象的系统的物理特性,-执行系统的模拟,其中调节器基于调节器参数集对调节对象执行调节,-基于模拟来计算调节成本值,和-根据调节成本值,适配机器学习模型并且重复上述步骤。
附图说明
16.以下参考附图阐述示范性细节和示例性实施方式。在此:图1示出压缩空气供应装置的示意图,图2示出用于提供机器学习模型的第一方法的流程图,图3示出用于产生模拟数据的框图,图4示出用于基于模拟数据对机器学习模型进行训练的框图,图5示出用于提供机器学习模型的第二方法的流程图,图6示出用于提供机器学习模型的框图,图7示出气动系统的示意图,和图8是阀设备的示意图。
具体实施方式
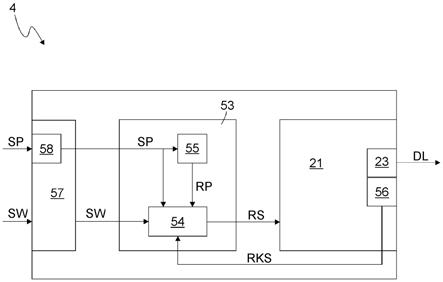
17.图1示出压缩空气供应装置4,所述压缩空气供应装置用于基于调节器参数rp执行调节、尤其是位置调节和/或压力调节。该调节尤其是非线性调节。此外,调节可以是线性调节。
18.示范性地,压缩空气供应装置4包括计算机单元53、例如微控制器,在所述计算机单元上实施调节器54、尤其是调节器算法。调节器54基于额定值sw和尤其是反馈信号rks提供调节器信号rs。调节器54通过调节器参数rp被参数化。调节器参数rp例如是调节器增益。
19.压缩空气供应装置4示范性地包括阀设备21,所述阀装置具有压力出口23并且根
据调节器信号rs在压力出口23处输出压缩空气dl。压缩空气供应装置4、尤其是阀设备21适宜地具有传感器装置56,所述传感器装置提供反馈信号rks。例如,传感器装置56检测位置和/或压力。
20.压缩空气供应装置4、尤其是计算机单元53具有机器学习模型55并且被构造用于在使用机器学习模型55的情况下基于所输入的系统参数sp来提供调节器参数rp。系统参数sp描述气动系统、例如图7中所示的气动系统100的物理特性,在所述气动系统中应该使用压缩空气供应装置4。压缩空气供应装置4被构造用于基于所提供的调节器参数rp执行调节。
21.示范性地,压缩空气供应装置4包括接口57、尤其是通信接口,压缩空气供应装置4经由所述接口接收额定值sw和/或系统参数sp。压缩空气供应装置4优选地包括用于尤其是通过用户输入系统参数sp的用户接口58。用户接口58可以例如包括用于输入系统参数sp的用户界面、尤其是图形用户界面。
22.系统参数sp优选地包括尺寸、体积、质量、摩擦、角度和/或压力。
23.例如,系统参数sp包括(图7中所示的)气动执行器2、尤其是气动驱动气缸的一个或多个尺寸,所述气动执行器通过压缩空气供应装置4被操控。例如,系统参数sp包括尤其是气动执行器2的气缸直径、气缸长度和/或活塞直径。
24.此外,系统参数sp可以包括软管装置28的一个或多个尺寸。软管装置28在压缩空气供应装置4和气动执行器2之间提供气动连接。例如,系统参数包括尤其是软管装置28的软管长度和/或软管内径。
25.系统参数sp此外可以包括在系统100中、尤其是在气动执行器2处出现的一种或多种摩擦。例如,系统参数sp包括库仑摩擦(coloumbsche reibung)和/或粘性摩擦。
26.此外,系统参数sp可以包括一个或多个死体积(totvolumina),尤其是气动执行器2的死体积。例如,系统参数sp可以包括气动执行器2的终端处的死体积和/或气动执行器2的轴承盖处的死体积。
27.此外,系统参数sp可以包括一个或多个质量。例如,系统参数sp可以包括尤其是气动执行器2的自重、例如气动执行器2的在调节时要置于运动中的执行器元件3的自重和/或尤其是在调节时由气动执行器2要置于运动中的负载对象的负载质量(lastmasse)。
28.此外,系统参数sp可以包括压缩空气的中心压力——即尤其是压力水平——和/或气动执行器2的安装角度。
29.此外,系统参数可以包括所计算的系统参数,例如尤其是未调节的系统的固有频率和/或阻尼,和/或一个或多个总质量。所计算的系统参数可以优选地从上述系统参数中的一个或多个中来计算。机器学习模型55适宜地将所计算的系统参数映射到调节器参数上。所计算的系统参数尤其是预聚合的值。预聚合的值可以优选地被用作机器学习模型55的输入。
30.系统参数sp优选地包括上述系统参数中的多个或全部。
31.机器学习模型优选地包括回归方法,例如支持向量回归、回归树和/或人工神经网络。支持向量回归、回归树和/或人工神经网络适宜地提供系统参数sp到调节器参数rp上的映射。机器学习模型尤其是基于模拟数据。机器学习模型优选地利用模拟数据来训练,如以下仍要详细阐述的。
32.根据一种可能的扩展方案,调节器参数包括被调系统的本征值的系数。机器学习模型将系统参数sp映射到系数上。调节器54在使用系统方程的情况下基于系数提供调节器增益并且在调节时使用调节器增益。
33.压缩空气供应装置4优选地被构造用于在启动时适配机器学习模型55并且在使用经适配的机器学习模型55的情况下提供调节器参数rp用于调节。例如,压缩空气供应装置4被构造用于在启动压缩空气供应装置4时(例如在系统100中)执行学习旅程(lernfahrt),例如利用传感器装置56,在学习旅程期间记录测量值,基于测量值适配机器学习模型55,并且基于系统参数sp利用经适配的机器学习模型55提供调节器参数rp,并且使用所提供的调节器参数rp用于调节。
34.调节器54优选地具有调节器模型,利用所述调节器模型提供调节。调节器模型优选地是至少二阶或至少三阶的系统。调节器模型示范性地是三阶的系统。通过调节器参数对调节器模型、尤其是三阶的系统进行参数化。例如,调节器参数包括第一调节器参数、第二调节器参数和/或第三调节器参数。第一调节器参数和/或第二调节器参数适宜地分别表示被调系统的固有频率。示范性地,第一调节器参数表示被调系统的第一固有频率和/或第二调节器参数表示被调系统的第二固有频率(尤其是不同于第一固有频率)。第三调节器参数优选地表示被调系统的阻尼。调节器54尤其是提供非线性调节并且适宜地不是pid调节器。调节器参数rp适宜地在压缩空气供应装置4的进行中的正常运行中(尤其是在启动之外)不被改变。
35.如图1中所示的,系统参数sp可以可选地(尤其是直接地)被提供给调节器54,使得调节器54在执行调节时考虑系统参数sp。
36.压缩空气供应装置4优选地包括现场设备、尤其是阀岛和/或阀模块。机器学习模型适宜地在现场设备中、尤其是在阀岛和/或阀模块中存在。在使用机器学习模型的情况下提供调节器参数rp优选地在现场层面中进行。
37.压缩空气供应装置4可以尤其是根据具有以下步骤的方法被运行:在第一可选步骤中,尤其是通过用户将系统参数sp输入到压缩空气供应装置4中。在另一步骤中,在使用机器学习模型55的情况下,基于所输入的系统参数sp提供、尤其是计算调节器参数rp。在另一步骤中,基于所提供的调节器参数rp执行调节。
38.参考图2、3和4,在下面应该探讨用于提供机器学习模型、尤其是上面阐述的机器学习模型55的方法。该方法也应该被称为第一方法或监督学习(supervised-learning)方法。在第一方法中,首先产生模拟数据64,并且然后利用所产生的模拟数据64对机器学习模型55进行训练。图2示出第一方法的流程图。图3示出用于产生模拟数据64的框图并且图4示出用于对机器学习模型55进行训练的框图。第一方法适宜地在模拟计算机上被实施并且尤其是纯虚拟地进行。
39.该方法包括第一步骤s11,其中针对由系统参数集sps和调节器参数集rps组成的集组合中的多个集组合执行系统60的多个模拟。尤其是,针对系统60的不同系统配置执行模拟。系统60包括调节器54、尤其是上面阐述的调节器54,以及包括调节对象61。例如,系统60是下面阐述的气动系统100。调节对象61例如包括阀设备21和/或气动执行器2。每个系统参数集sps定义系统60的不同系统配置。每个系统参数集sps包括多个系统参数sp、尤其是上面阐述的系统参数sp。系统参数sp描述系统60的物理特性、尤其是系统60的分别要模拟
的系统配置的物理特性。在模拟时,通过系统参数sp对系统60进行建模。尤其是,系统参数sp描述调节对象(regelstrecke)61的物理特性。
40.每个调节器参数集rps包括多个调节器参数rp、尤其是上面阐述的调节器参数rp。在模拟时,对由调节器54基于调节器参数rp执行的调节进行模拟。因此,调节是模拟调节,尤其是模拟非线性调节。模拟调节例如是模拟位置调节或模拟压力调节。尤其是,在模拟时利用调节器参数rp对调节器54的调节器模型进行参数化。在模拟中的每个模拟时模拟:调节器54如何基于各自调节器参数集rps执行对系统60的通过各自系统参数集sps定义的系统配置、尤其是通过系统参数集sps定义的调节对象61的调节。例如,在每个模拟时,基于输出给调节器54的额定值sw对调节进行模拟,并且基于模拟调节来计算调节质量参量,所述调节质量参量表明模拟调节的质量。例如,调节品质被计算为调节质量参量。尤其是,(模拟)调节误差rf和/或(模拟)反馈信号rks被计算为调节质量参量。示范性地作为额定值sw和反馈信号rks的差得出调节误差rf。示范性地,由(模拟)调节对象61输出反馈信号rks。
41.针对由系统参数集sps和调节器参数集rps组成的各自集组合执行每个模拟。在系统60的每个模拟时,针对由系统参数集sps和调节器参数集rps组成的各自集组合计算各自调节质量参量。
42.作为模拟的结果得出具有多个条目的模拟结果数据,其中对于每个模拟都存在条目,并且每个条目表明、尤其是包括在各自模拟时使用的由各自系统参数集sps和各自调节器参数集rps组成的集组合以及分别属于该集组合的调节质量参量。示范性地,每个系统参数集sps包括至少5个、至少10个或至少15个系统参数sp。此外,每个调节器参数集rps示范性地包括至少2个或至少3个调节器参数、尤其是正好3个调节器参数。
43.第一方法包括第二步骤s12,其中基于针对(由各自系统参数集sps和调节器参数集rps组成的)每个集组合的模拟来计算各自调节成本值rkw。适宜地存在成本函数63,所述成本函数尤其是基于调节质量参量来计算调节成本值rkw。每个调节成本值rkw表明在各自模拟时模拟的调节的质量。因此,每个调节成本值rkw是在各自模拟时使用的调节器参数集rps与各自系统参数集如何好地相配的量度。调节越好、即调节品质越高或调节误差越低,调节成本值rkw越低。因此,低调节成本值rkw表明调节器参数集和系统参数集良好地协调。
44.在步骤s19中,调节器参数集rps优选地基于调节成本值rkw被适配、尤其是被优化。基于经适配的调节器参数集rps,根据步骤s11重新执行模拟。基于模拟,根据步骤s12重新计算调节成本值(rkw)。对于(在步骤s11中执行的)模拟使用的调节器参数集rps优选地在使用优化算法62、例如基于梯度的优化算法的情况下被产生和/或适配、尤其是优化。例如,使用matlab的fmincon作为优化算法。优化算法62尤其是被构造用于提供调节器参数集rps,使得最小化调节成本值rkw。示范性地,调节成本值rkw被输送给优化算法62。此外示范性地,初始调节器参数集irps被输送给优化算法62,优化算法62基于所述初始调节器参数集提供用于第一模拟的第一调节器参数集。例如,用于第一模拟的第一调节器参数集是初始调节器参数集irps。此外,第一调节器参数集可以随机地被确定、尤其是被初始化。优化算法62适宜地分别基于最后执行的模拟、尤其是基于最后执行的模拟的调节成本值rkw来产生用于后续模拟的调节器参数集rps。优选地基于调节成本值rkw来迭代地适配、尤其是优化调节器参数集rps。根据步骤s19对调节器参数集rps的适配、基于经适配的调节器参数集rps对模拟的执行以及根据步骤s12对调节成本值rkw的计算优选地被重复多次,尤其是
至少10次、至少50次、至少100次或至少500次。
45.第一方法包括第三步骤s13,其中基于所计算的调节成本值rkw选择(分别由系统参数集sps和调节器参数集rps组成的)模拟集组合。基于所选择的集组合提供模拟数据64,所述模拟数据包括所选择的集组合。模拟数据64包括多个条目,其中每个条目都包括模拟参数集sps和所属的调节器参数集rps。
46.示范性地,存在选择函数65,所述选择函数将每个调节成本值rkw与第一极限值进行比较。其调节成本值rkw小于第一极限值的(分别由系统参数集sps和调节器参数集rps组成的)集组合被添加到模拟数据64。其调节成本值rkw不小于第一限值的(分别由系统参数集sps和调节器参数集rps组成的)集组合被丢弃并且不被添加到模拟数据64。
47.第一方法包括第四步骤s14,其中基于模拟数据集64、尤其是基于所选择的集组合来创建训练数据集66。训练数据集66适宜地包括包含在模拟数据64中的集组合的子集或包含在模拟数据64中的所有集组合。训练数据集66尤其是包括多个条目,其中每个条目包括各自系统参数集sps和所属的调节器参数集rps。
48.此外,优选地基于所选择的集组合、也就是说基于包含在模拟数据64中的由系统参数集和调节器参数集组成的集组合来创建测试数据集71。测试数据集71适宜地包括包含在模拟数据64中的集组合的子集或包含在模拟数据64中的所有集组合。尤其是,测试数据集71包括与训练数据集66不同的集组合子集。测试数据集66尤其是包括多个条目,其中每个条目都包括各自系统参数集sps和所属的调节器参数集rps。
49.第一方法包括第五步骤s15,其中利用训练数据集66训练机器学习模型55。示范性地,存在学习算法67,所述学习算法在使用训练数据集66的情况下训练机器学习模型55。在训练时,机器学习模型55、尤其是支持向量回归、回归树和/或人工神经网络的回归参数被适配、尤其是被优化。例如在人工神经网络中,回归参数尤其是包括权重。此外,在训练时,机器学习模型55的超参数可以被适配、尤其是被优化。超参数例如包括尤其是人工神经网络的神经元的数量和/或层的数量。尤其是,学习算法67训练机器学习模型55,使得在由机器学习模型55基于训练数据集66的系统参数sp计算的调节器参数rp与包含在训练数据集66中的调节器参数之间的差异被最小化。
50.示范性地,学习算法67具有学习算法成本函数,学习算法利用该学习算法成本函数计算在所计算的调节器参数与训练数据集66的调节器参数之间的差异。该差异尤其是被计算为所计算的调节器参数和训练数据集的调节器参数的差的平方和。尤其是,学习算法成本函数计算“均方误差(mean squared error)”、即所计算的调节器参数与训练数据集的调节器参数之间的均方偏差。
51.示范性地,第一方法此外包括第六步骤s16,其中在使用测试数据集71的情况下测试经训练的机器学习模型55。示范性地存在评估函数70,所述评估函数利用测试数据集71测试经训练的机器学习模型55。尤其是,评估函数70将测试数据集71的系统参数集sps输送给机器学习模型55,使得机器学习模型55基于系统参数集sps计算调节器参数集。评估函数70适宜地包括评估成本函数,利用该评估成本函数计算评估成本值,所述评估成本值尤其是表明在所计算的调节器参数与测试数据集71的调节器参数之间的差异。评估成本值尤其是被计算为所计算的调节器参数和测试数据集71的调节器参数的差的平方和。尤其是,评估成本函数计算“均方误差”、即所计算的调节器参数与测试数据集的调节器参数之间的均
方偏差。
52.优选地根据经训练的机器学习模型的测试的结果来对机器学习模型、尤其是回归参数进行适配。此外,尤其是根据经训练的机器学习模型的测试的结果可以对机器学习模型55的超参数进行适配。
53.示范性地存在比较函数69,所述比较函数将评估成本值与第二极限值进行比较。只要评估成本值大于第二极限值,该方法就继续进行第七步骤s17。只要评估成本值小于第二极限值,该方法就继续进行第八步骤s18。
54.在第七步骤s17中,示范性地通过学习算法适配函数68对机器学习模型55的训练进行适配,所述学习算法适配函数示范性地基于比较函数69的结果和/或评估函数70的结果来适配学习算法、尤其是学习算法的超参数。然后该方法返回到步骤s15。适宜地一直重复训练的适配、机器学习模型的训练和机器学习模型的测试,直至评估成本值小于第二极限值为止。
55.优选地尤其是根据评估成本值来迭代地适配训练和/或机器学习模型。根据步骤s17对机器学习模型55的训练的适配、根据步骤s15对机器学习模型55的训练和根据步骤s16对机器学习模型55的测试优选地被重复多次、尤其是在至少10次、至少50次、至少100次或至少500次。
56.在第八步骤s18中,结束训练并且例如在调节器装置72上提供机器学习模型55。调节器装置72例如是压缩空气供应装置4。
57.在上面阐述的第一方法中、即在监督学习方法中,因此有两个阶段:数据生成阶段,其中产生模拟数据64;以及训练阶段,其中利用模拟数据64训练机器学习模型55。在数据生成阶段中,使用优化器——优化算法62,所述优化器针对具体的系统配置(通过系统参数集sps定义)确定尽可能最佳的调节器参数集rps。示范性地,为此通过调节器参数最小化成本函数63。对于优化算法62、尤其是最小化,适宜地使用数值方法(并且尤其是不使用机器学习方法或人工智能方法)。在训练阶段中,使用模拟数据64(用于具体的系统配置的所标识的调节器参数)来然后(darauf)训练回归方法——机器学习模型55。
58.在数据生成阶段中,由调节器54和调节对象61组成的有模拟能力的总系统作为系统60以数值方式(numerisch)被模拟。进行模拟所基于的系统参数集sps的系统参数被改变,尤其是通过支持试验计划和/或以基于统计的方式被改变。优化算法62优选地为不同的系统参数集sps执行调节器参数集rps的数值优化。
59.对于训练阶段,优选地仅使用数据生成阶段的“好的”数据、即为了分析模拟结果数据所使用的成本函数63处于第一极限值以下的数据。由此得出的数据——模拟数据64——例如可以被划分成两个矩阵。第一矩阵,其包含模拟数据的所有系统参数集,和第二矩阵,其包含分配给系统参数集的调节器参数集。模拟数据、尤其是两个矩阵适宜地被细分成训练数据集66和测试数据集71。使用训练数据集66来学习机器学习模型55的回归参数。使用测试数据集71用于评估所学习的回归参数,并且附加地可以使用测试数据集71用于确定合适的超参数。例如,利用训练数据集66训练多个机器学习模型55,并且尤其是在调节器装置72上,选择和提供具有最低评估成本值的那个机器学习模型55。
60.参考图5和图6,在下面应该探讨用于提供机器学习模型、尤其是上面阐述的机器学习模型55的另一方法。该另一方法也应称为第二方法或自适应学习方法。在第二方法中,
由(最初提供的)机器学习模型55计算的调节器参数集借助于系统60的模拟被检验,并且机器学习模型55基于模拟被适配。图5示出第二方法的流程图。图6示出针对第二方法的框图。第二方法适宜地在模拟计算机上被实施并且尤其是以纯虚拟的方式进行。
61.第二方法包括第一步骤s21,其中在使用机器学习模型55的情况下,基于系统参数集sps提供、尤其是计算调节器参数集rps。示范性地,作为机器学习模型55首先(尤其是在第一次执行第一步骤s21时)使用初始机器学习模型,所述初始机器学习模型例如基于随机参数、尤其是随机回归参数。
62.系统参数集sps包括系统参数sp,所述系统参数描述系统60的物理特性。系统参数sp例如是上面阐述的系统参数sp。系统60包括调节器54、尤其是上面阐述的调节器54以及调节对象61。例如,系统60是下面阐述的气动系统100。调节对象61例如包括阀设备21和/或气动执行器2。
63.第二方法此外包括第二步骤s22a,其中执行系统60的模拟。在模拟时模拟调节器64如何基于调节器参数集rps执行对调节对象61的调节。在模拟时,利用系统参数sp对系统60进行建模。尤其是,系统参数sp描述调节对象61的物理特性。调节器参数集rps包括多个调节器参数rp、尤其是上面阐述的调节器参数rp。在模拟时,由调节器54执行的调节基于调节器参数rp进行。该调节是模拟调节、尤其是模拟非线性调节。模拟调节例如是模拟位置调节或模拟压力调节。尤其是,在模拟时,利用调节器参数rp对调节器54的调节器模型进行参数化。在模拟时模拟调节器54如何基于调节器参数集rps执行对通过系统参数集sps定义的系统60、尤其是通过系统参数集定义的调节对象61的调节。例如,在模拟时,基于输出给调节器54的额定值sw对调节进行模拟,并且基于模拟调节来计算调节质量参量,所述调节质量参量表明模拟调节的质量。例如,作为调节质量参量计算调节品质。尤其是,作为调节质量参量计算(模拟)调节误差rf和/或(模拟)反馈信号rks。示范性地作为额定值sw和反馈信号rks的差得出调节误差rf。示范性地,由(模拟)调节对象61输出反馈信号rks。
64.对第二步骤s22a替代地或补充地,还可以执行经改变的第二步骤s22b,其中通过调节器54基于调节器参数集rps执行调节对象61的真实调节(即不执行模拟调节)。调节对象61是真实的、即物理上存在的调节对象。在第二步骤s22b时,所使用的系统参数集sps描述真实系统、例如系统100,调节在所述系统上运行。在使用步骤s22b的情况下,可以例如在目标硬件上实施第二方法,其方式是直接针对真实结构分析(下面阐述的)成本函数63。由此可以实施其他功能、例如具体应用(applikation)处的微调(fine-tuning)。尤其是,可以借助于第二步骤s22b针对具体应用对真实系统进行优化。
65.优选地针对多个不同的系统参数集执行步骤s21和s22a(和/或s22b)。
66.第二方法包括第三步骤s23,其中基于该模拟(或只要执行多个模拟,则为这些模拟)来计算调节成本值。只要实施步骤s22b,就可以基于真实调节来确定调节成本值。适宜地存在成本函数63,所述成本函数尤其是基于调节质量参量来计算调节成本值rkw。调节成本值rkw表明在模拟时模拟的调节的质量和/或真实调节的质量。因此,调节成本值rkw是在模拟时(和/或在真实调节时)使用的调节器参数集rps与系统参数集如何好地相配的量度。控制越好、即调节品质越高或调节误差越低,调节成本值rkw越低。因此,低调节成本值rkw表明调节器参数集和系统参数集良好地协调。
67.可选地可以使用基于梯度的优化方法。在这种情况下,适宜地执行多次模拟,以便
尤其是以数值方式和/或根据调节器参数集来确定成本函数或调节成本值的梯度。
68.根据调节成本值,适配机器学习模型55并且重复上述步骤s21、s22a(和/或s22b)和s23。一直重复步骤s21、s22a(和/或s22b)和s23,直至满足中止标准,例如直至调节成本值小于极限值。
69.示范性地,存在评定函数73,所述评定函数根据调节成本值评定:机器学习模型55是否应该在其当前状态下被提供或者机器学习模型55是否必须进一步被适配。例如,评定函数73根据调节成本值来检查:是否满足用于适配机器学习模型55的中止标准。例如,将调节成本值或调节成本值的梯度与极限值进行比较。只要调节成本值(或调节成本值的梯度)大于极限值,该方法就继续进行第四步骤s24。只要调节成本值(或调节成本值的梯度)小于第二极限值,该方法就继续进行第五步骤s25。
70.在第四步骤s24中,机器学习模型55被适配,示范性地机器学习模型55的回归参数被适配。尤其是,机器学习模型55的支持向量回归、回归树和/或人工神经网络的回归参数被适配。示范性地存在适配函数74,所述适配函数执行对机器学习模型55的适配。适配函数74适宜地使用优化方法,例如最陡上升(steilsten anstieg)的方法。然后,方法返回到步骤s21。适宜地一直重复步骤s21、s22a(和/或s22b)、s23和s24,直至满足中止标准,也即例如直至调节成本值小于第二极限值。
71.优选地,尤其是根据调节成本值迭代地适配机器学习模型。根据步骤s24对机器学习模型的适配、根据步骤s21对调节器参数集的提供、根据步骤s22a对模拟的执行和/或根据步骤s22b对调节的执行以及根据步骤s23对调节成本值的计算优选地被重复多次、尤其是至少10次、至少50次、至少100次或至少500次。
72.该方法在第五步骤s25中被结束并且例如在调节器装置72上,机器学习模型55被提供。调节器装置72例如是压缩空气供应装置4。
73.在上述第二方法中、即在自适应学习方法中,最小化成本函数63以便确定机器学习模型55的回归参数。该成本函数63直接映射调节器54的调节器性能,其方式是例如定位不准确性受到惩罚(bestraft)。为了确定调节器性能,执行模拟。
74.第二方法适宜地不包括计算调节器参数偏差的成本函数的步骤。
75.在第二方法中,尤其是不产生训练数据集。在第一次执行步骤s21时,优选地使用尚未训练的机器学习模型。
76.可替代地,在第一次执行步骤s21时,可以使用通过第一方法获得的机器学习模型55、也即尤其是已经利用训练数据集训练过的机器学习模型。因此优选地在使用第一方法的情况下提供在第二方法中使用的机器学习模型。
77.优选地在压缩空气供应装置4中使用借助于第一和/或第二方法提供的机器学习模型55。
78.下面应该参考图7阐述系统100。系统100包括压缩空气供应装置4、气动执行器2和软管装置28。系统100表示压缩空气供应装置4的示范性应用环境。压缩空气供应装置4也可以单独地、即在无气动执行器3和/或软管装置28的情况下被提供。
79.压缩空气供应装置4示范性地包括构造为阀岛的阀装置14,经由所述阀装置提供压缩空气用于对例如执行器2进行调节、尤其是位置调节和/或压力调节。调节基于利用机器学习模型55提供的调节器参数rp进行。阀装置14不强制性地必须是阀岛。例如,阀装置14
也可以实施为单阀或另一阀单元。
80.在阀装置14处存在用于提供压缩空气的两个压力出口23、24。两个压力出口23、24中的每一个都与气动执行器2的各自压力室8、9气动连接。在执行器2仅具有一个压力室的替代扩展方案中,与此相应地仅一个压力出口与压力室连接。
81.阀装置14具有带有压力传感器的压力传感器装置29,利用所述压力传感器可以测量压力出口23、24处的压力和/或排气接头(entl
ü
ftungsanschluss)26和/或通气接头(bel
ü
ftungsanschluss)27中的压力。压力传感器装置29尤其是传感器装置56的一部分。
82.示范性地,阀装置14包括多个模块,例如阀模块17和/或i/o模块18。阀装置14此外包括控制单元19,所述控制单元优选地同样被实施为模块。阀装置14适宜地具有载体20、尤其是载体板,控制单元19、阀模块17和/或i/o模块18布置在所述载体上。
83.计算机单元53优选地是控制单元19或阀模块17的一部分。机器学习模型55优选地存在于控制单元19中或阀模块17中。
84.阀装置14示范性地被构造为串联模块装置并且尤其是也可以被称为阀岛。上面提到的模块尤其是串联模块,所述串联模块优选地构造成盘状的。尤其是,阀模块17被实施为阀盘。串联模块适宜地尤其是沿着阀装置14的纵轴接连排列。
85.压缩空气供应装置4示范性地此外包括上级控制装置15和/或可选地云服务器16和/或用户设备49。用户接口58例如是上级控制装置15、云服务器16和/或用户设备49的一部分。
86.阀装置14适宜地与上级控制装置15和/或云服务器16通信连接。阀装置14优选地经由总线25、尤其是本地总线、例如现场总线与上级控制装置15连接,和/或可选地经由广域网22、例如互联网与云服务器16连接。
87.示范性地,执行器2包括用于检测执行器元件3的位置的位置传感器设备10。位置传感器设备10尤其是是传感器装置56的一部分并且适宜地经由通信线路91、92与阀装置14连接。
88.气动执行器2适宜地是可以被施加压缩空气的气动执行器。示范性地,气动执行器2被构造为驱动装置,尤其是被构造为驱动气缸。气动执行器2示范性地包括执行器主体7、执行器元件3和至少一个压力室8、9。气动执行器2适宜地包括两个可以彼此单独地被施加压缩空气的压力室8、9,并且尤其是被构造为双作用执行器。对此替代地,气动执行器2也可以仅具有一个压力室并且与此相应地被构造为单作用执行器。
89.执行器主体7优选地被实施为气缸并且具有内部容积。执行器元件3例如包括活塞5和/或活塞杆6。活塞5布置在执行器主体7中并且将执行器主体7的内部容积细分成两个压力室8、9。
90.软管装置28示范性地包括两个软管51、52。第一软管51将第一压力出口23气动地与第一压力室8连接,并且第二软管52将第二压力出口24气动地与第二压力室9连接。在气动执行器2仅具有一个压力室的替代扩展方案中,软管装置28适宜地仅包括一个软管。
91.上级控制装置15示范性地被构造为存储器可编程控制装置并且与阀装置14通信连接,尤其是与控制单元19通信连接。上级控制装置15此外适宜地尤其是经由广域网22、优选地经由互联网与云服务器16连接。上级控制装置15适宜地被构造用于提供额定值信号sws,所述额定值信号预先给定执行器元件3在位置调节的范围中被调节到的(额定)位置。
92.用户设备49示范性地是移动设备,例如智能电话、平板计算机和/或笔记本电脑。此外,用户设备49可以是台式计算机、例如pc。用户设备49适宜地尤其是经由广域网22、例如互联网与控制单元19、云服务器16和/或上级控制装置15通信连接。用户设备49尤其是被构造用于进行系统参数sp的用户输入。经由用户设备49可以适宜地访问用户界面,利用所述用户界面可以输入系统参数sp。用户界面适宜地是网页界面。此外,用户界面可以用于选择、激活提供机器学习模型55和/或调节器54的应用程序和/或将所述应用程序加载到控制单元19和/或阀模块17上。
93.云服务器16适宜地远离阀装置14和/或气动执行器2地布置,尤其是布置在另一地理地点处。云服务器16优选地被构造用于提供应用程序。适宜地响应于利用用户设备49进行的用户输入,可以将应用程序从云服务器16加载到上级控制装置15和/或控制单元19和/或阀模块17上。
94.图8示出示例性的阀设备21,利用所述阀设备可以提供用于压力室8、9的压力。阀设备21是压缩空气供应装置4、尤其是阀装置14、优选地阀模块17的一部分。
95.阀设备21具有两个压力出口23、24,利用所述压力出口可以提供两个单独的压缩空气压力和/或两个单独的压缩空气质量流。阀设备21此外具有与排气管路连接的排气接头26和与通气管路连接的通气接头27。适宜地,供应压力施加在通气接头27上和/或大气压力施加在排气接头26上。
96.阀设备21对于每个压力出口23、24包括一个或多个阀元件48,经由所述阀元件可以调整各自出口开口的大小,当在各自压力出口23、24处提供压缩空气时将经过所述出口开口。
97.在图2中,阀设备21示范性地被构造为由四个2/2通阀31、32、33、34组成的全桥。第一2/2通阀31连接在通气接头27和第一压力出口23之间,第二2/2通阀32连接在第一压力出口23和排气接头26之间,第三2/2通阀连接在排气接头26和第二压力出口24之间,并且第四2/2通阀连接在第二压力出口24和通气接头27之间。
98.第一压力出口23可以选择性地经由第一2/2通阀与排气管路连接或经由第二2/2通阀与通气管路连接,并且第二压力出口24可以选择性地经由第三2/2通阀与排气管路连接或经由第四2/2通阀与通气管路连接。
99.每个2/2通阀31、32、33、34示范性地被构造为比例阀;也就是说每个2/2通阀31、32、33、34具有阀元件48,所述阀元件可以被置于打开位置、关闭位置和在打开和关闭位置之间的任意中间位置。2/2通阀31、32、33、34优选地是先导控制式阀(vorgesteuerte ventile),所述先导控制式阀分别具有两个先导阀41、42,通过所述先导阀可以操作阀元件。先导阀41、42示范性地被构造为压电阀。可以通过各自阀元件48的位置适宜地调整前述出口开口。
100.示范性地,第一和第二2/2通阀31、32构成第一半桥并且第三和第四2/2通阀33、34构成第二半桥。优选地可以通过第一半桥调整第一压力出口23的出口开口并且可以通过第二半桥调整第二压力出口24的出口开口。
101.阀装置14适宜地包括具有一个或多个压力传感器的压力传感器装置29,以便检测阀装置14、尤其是阀设备21的压力。
102.示范性地,阀装置14、尤其是阀设备21包括用于检测在第一压力出口23处提供的
压力的第一压力出口压力传感器45和/或用于检测在第二压力出口24处提供的压力的第二压力出口压力传感器46。阀装置14、尤其是阀设备21此外适宜地包括用于检测在通气接头27处提供的压力的供风压力传感器44和/或用于检测在排气接头26处提供的压力的排风压力传感器43。
103.阀装置14、尤其是阀设备21适宜地包括用于检测阀元件48的位置的行程传感器47。压缩空气供应装置4尤其是被构造用于借助于行程传感器47确定压力出口23、24的出口开口的大小。
104.压力传感器装置29和/或行程传感器47适宜地是传感器装置56的一部分。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1