即时影像的校正装置及校正方法与流程
1.本发明涉及一种校正装置及校正方法,尤其涉及一种即时影像的校正装置及校正方法。
背景技术:
2.即时影像的采集与显示技术虽然可以应用在很多不同的技术领域,但是在各个技术领域中都有需要克服的问题。
3.例如在远端监控系统中,设备通常会建置于特定区域内,维护人员不得随意进出,或是距离设备的设置地点太远。当设备发生问题时,维护人员无法即时修复设备,以恢复影像的输出。再例如,于电子装置上使用影像采集装置(例如采集卡)来采集并录制影像时,若输入影像不稳定,容易被影像处理软件误判为影像已中断,因而停止采集与录制。如此一来,将会错失重要影像之保存。
4.再例如,在医疗领域中,摄影镜头(例如内视镜)常常会与电烧刀或其他会散发高频信号的器材一同伸入人体内部进行检查,而这些高频信号容易影响摄影镜头所取得的影像,进而造成医生的误判。并且,所述摄影镜头也可能受到温度、电源不稳定等因素而导致影像的不稳定。
5.目前市场上已有部分影像处理系统,可以在侦测到输入影像异常时,允许使用者手动或系统自动从远端发送指令以控制整个系统重新启动,借此解决输入影像异常的问题。然而在部分应用领域中(尤其是医疗领域),使用者于影像检视过程中(例如手术进行中)不见得有能力以手动方式重启系统。再者,将整个系统重启至系统恢复成可以使用的状态,通常需要经过数分钟的时间,在部分应用领域中,使用者可能没有时间等待系统重启。
6.为解决上述问题,本发明提出了一种即时影像的校正装置与校正方法,可以自动判断即时影像的状况并且自动进行校正,以令系统可以维持输出影像的品质与稳定性,借此避免造成使用者的困扰。
技术实现要素:
7.本发明的主要目的,在于提供一种即时影像的校正装置与校正方法,可自动侦测输入影像的状态并且即时进行自动校正,以达到长时间稳定的影像输出。
8.为了达成上述目的,本发明的校正装置包括:一影像侦测模组,连接一影像输入装置以持续接收若干即时影像;一影像比对模组,连接该影像侦测模组,执行一分析演算法以分析各该即时影像的一影像特征,计算任两张时间相邻的该即时影像的该影像特征的一特征差异,并基于该特征差异计算各该即时影像的该影像特征的一移动向量;一控制模组,连接该影像输入装置、该影像侦测模组及该影像比对模组,记录各该即时影像的该移动向量,并基于累计的各所述移动向量计算该若干即时影像中的一当前即时影像的一移动轨迹预测值;及
一影像校正模组,连接该影像比对模组及该控制模组,用以提供一输出影像;其中,该控制模组于该当前即时影像的该移动轨迹预测值与该当前即时影像的该移动向量间的一第一差异落入一校正允许范围内时,基于该当前即时影像的该移动轨迹预测值及该移动向量计算一补偿值,并控制该影像校正模组基于该补偿值校正该当前即时影像,以产生该输出影像并同时提供一第一警示信息;其中,该控制模组于该第一差异超出该校正允许范围时重置该影像输入装置,并且控制该影像校正模组将一预设影像做为该输出影像并同时提供一第二警示信息。
9.如上所述,其中该分析演算法为一移动向量演算法。
10.如上所述,其中该特征差异为任两张时间相邻的该即时影像中同一区域的一亮度偏移量、一色度偏移量、一离散小波变换量(discrete wavelet transform, dwt)或一连续小波转换量(continous wavelet transform, cwt)。
11.如上所述,其中该影像输入装置为一影像感测器、一高画质多媒体接口(high definition multimedia interface, hdmi)、一串列数字接口(serial digital interface, sdi)、一电子数据处理(electronic data processing, edp)接口或一移动产业处理接口(mobile industry processor interface, mipi)。
12.如上所述,其中该控制模组于该第一差异大于或等于一第一预设值并且小于一第二预设值时,判断该第一差异落入该校正允许范围内,并且于该第一差异大于该第二预设值时判断该第一差异超出该校正允许范围,其中该第一预设值小于该第二预设值。
13.如上所述,其中该第一预设值为正负5%,该第二预设值为正负30%。
14.如上所述,其中该预设影像为与该当前即时影像于时间上相邻的前一张影像。
15.如上所述,其中当该第一差异落入该校正允许范围内时,该控制模组计算该当前即时影像的该移动轨迹预测值及该移动向量的一内插值的一平均值,并以该平均值做为该补偿值。
16.如上所述,其中该控制模组于该第一差异小于该第一预设值时将该补偿值设定为0,并控制该影像校正模组基于该补偿值校正该当前即时影像以产生该输出影像。
17.如上所述,其中该影像侦测模组侦测各该即时影像的一基本影像资讯,该控制模组计算累计的若干该即时影像的该基本影像资讯与该当前即时影像的该基本影像资讯间的一第二差异,于该第一差异及该第二差异小于该第一预设值时设定该补偿值为0,于该第一差异及该第二差异落入该校正允许范围内时基于该当前即时影像的该移动轨迹预测值及该移动向量计算该补偿值,并于该第一差异及该第二差异超出该校正允许范围时重置该影像输入装置。
18.如上所述,其中该基本影像资讯为各该即时影像的曝光强度、频率、每秒帧数、有效影像垂直行数及有效影像水平像素数的至少其中之一。
19.为了达成上述目的,本发明的校正方法包括下列步骤:a)从一影像输入装置持续接收若干即时影像;b)执行一分析演算法以分析各该即时影像的一影像特征;c)计算任两张时间相邻的该即时影像的该影像特征的一特征差异,并且基于该特征差异计算各该即时影像的该影像特征的一移动向量;d)基于累计的各所述移动向量计算该若干即时影像中的一当前即时影像的一移
动轨迹预测值;e)于判断该当前即时影像的该移动轨迹预测值与该移动向量间的一第一差异落入一校正允许范围时,基于该当前即时影像的该移动轨迹预测值及该移动向量计算一补偿值;e1)该步骤e后,基于该补偿值校正该当前即时影像以产生一输出影像,并且同时提供一第一警示信息;f)于判断该第一差异超出该校正允许范围时,控制该影像输入装置进行重置;及f1)取得一预设影像做为该输出影像,并且同时提供一第二警示信息。
20.如上所述,其中该步骤c)包括:计算任两张时间相邻的该即时影像中同一区域的一亮度偏移量、一色度偏移量、一离散小波变换量(discrete wavelet transform, dwt)或一连续小波转换量(continous wavelet transform, cwt),以产生该特征差异。
21.如上所述,其中该步骤e)包括:于该第一差异大于或等于一第一预设值并且小于一第二预设值时,判断该第一差异落入该校正允许范围内,其中该第一预设值小于该第二预设值;该步骤f)包括:于该第一差异大于该第二预设值时,判断该第一差异超出该校正允许范围。
22.如上所述,其中该第一预设值为正负5%,该第二预设值为正负30%。
23.如上所述,其中该步骤f1)包括:取得与该当前即时影像于时间上相邻的前一张影像,以做为该预设影像。
24.如上所述,其中该步骤e)包括:计算该当前即时影像的该移动轨迹预测值及该移动向量的一内插值的一平均值,并以该平均值做为该补偿值。
25.如上所述,其中还包括:g)于判断该第一差异小于该第一预设值时,将该补偿值设定为0;及g1)该步骤g)后,基于该补偿值校正该当前即时影像以产生该输出影像。
26.如上所述,其中该步骤a)包括:侦测各该即时影像的一基本影像资讯,并且该校正方法还包括一步骤a1):计算累计的若干该即时影像的该基本影像资讯与该当前即时影像的该基本影像资讯间的一第二差异;其中该步骤g)是于该第一差异及该第二差异小于该第一预设值时设定该补偿值为0,该步骤e)是于该第一差异及该第二差异落入该校正允许范围内时计算该补偿值,该步骤f)是于该第一差异及该第二差异超出该校正允许范围时重置该影像输入装置。
27.如上所述,其中该基本影像资讯为各该即时影像的曝光强度、频率、每秒帧数、有效影像垂直行数及有效影像水平像素数的至少其中之一。
28.通过本发明的技术手段,校正装置可以在接收输入影像后自动进行分析。当输入影像异常且可校正时,校正装置可对输入影像进行即时校正。而当输入影像过于异常而无法校正时,校正装置可重置前端的影像输入装置,并且在重置过程持续输出影像。借此,可以持续且稳定地提供影像给使用者,以降低使用者因影像异常或遗失所造成的误判行为,同时提高影像品质。
附图说明
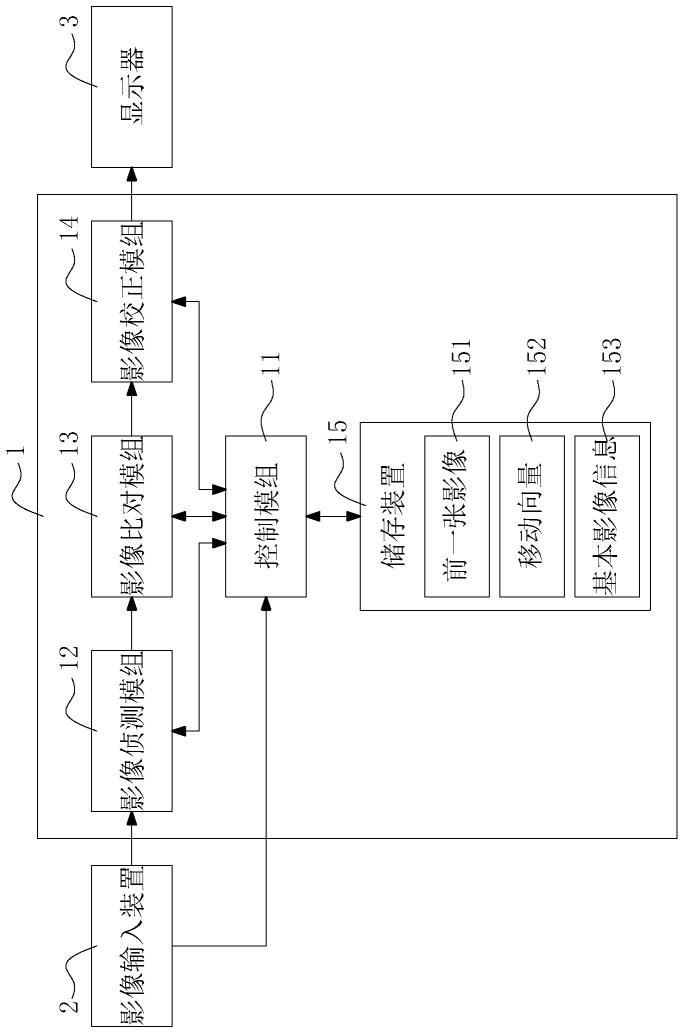
29.图1为本发明的校正装置的方块图的第一具体实施例;
图2为输入影像示意图;图3为本发明的校正方法的流程图的第一具体实施例;图4为移动向量的示意图的第一具体实施例;图5a为移动向量的示意图的第二具体实施例;图5b为移动向量的示意图的第三具体实施例;图6为本发明的输出影像产生流程图的第一具体实施例;图7为本发明的校正方法的流程图的第二具体实施例。
30.其中,附图标记:1
…
校正装置;11
…
控制模组;12
…
影像侦测模组;13
…
影像比对模组;14
…
影像校正模组;15
…
储存装置;151
…
前一张影像;152
…
移动向量;153
…
基本影像资讯;2
…
影像输入装置;3
…
显示器;4
…
输入影像;41
…
有效影像;42
…
垂直空白行;43
…
水平空白像素;51
…
前一张影像;511
…
影像特征;52、53
…
当前影像;521、531
…
影像特征;s10~s34、s40~s62
…
校正步骤;s220~s230
…
输出影像产生步骤。
具体实施方式
31.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
32.首请参阅图1,为本发明的校正装置的方块图的第一具体实施例。如图1所示,本发明揭露了一种即时影像的校正装置1(下面将于说明书中简称为校正装置1),所述校正装置1主要应用于各式的影像系统(图未标示)中。具体地,本发明的校正装置1一端连接影像系统的影像输入装置2以接收即时影像的输入,另一端连接影像系统的显示器3以持续且稳定地提供输出影像。
33.本发明的主要技术功效在于,校正装置1持续判断所接收的即时影像的状态,于即
时影像不需要校正时直接通过显示器3来输出;于即时影像需要校正时,先对即时影像进行校正后再进行输出;而于即时影像异常且无法校正时,对影像输入装置2进行重置,并且采用预设影像来进行输出。
34.换句话说,当影像输入装置2受到的干扰不强时,校正装置1可以直接输出即时影像,或是对即时影像进行校正后再输出校正后影像;而当影像输入装置2受到严重干扰而造成即时影像严重异常,甚至是无法输出影像时,校正装置1能及时自动重置前端的影像输入装置2,并且维持后端的显示器3能够持续且稳定地显示影像,借此避免使用者的困扰。
35.如图1所示,所述校正装置1主要包括控制模组11、影像侦测模组12、影像比对模组13、影像校正模组14及储存装置15。其中,影像比对模组13连接影像侦测模组12,影像校正模组14连接影像比对模组13,控制模组11则连接影像侦测模组12、影像比对模组13及影像校正模组14。
36.于一实施例中,所述控制模组11为通过校正装置1中的微控制单元(micro control unit, mcu)或图形处理单元(graphics processing unit, gpu)来实现的硬体模组,所述影像处理模组12、影像比对模组13及影像校正模组14为通过校正装置1中的现场可编程逻辑闸阵列(field programmable gate array, fpga)结合程式码所实现的软件模组,所述储存装置15为记忆体或硬碟,但并不以此为限。
37.校正装置1通过影像侦测模组12连接影像输入装置2,以从影像输入装置2持续接收即时影像。于一实施例中,影像输入装置2可为影像感测器(例如摄影机、红外线感测器、激光感测器等),用以即时感测外部的影像并汇入校正装置1中进行分析与处理。例如,所述影像输入装置2可为医疗用内视镜。
38.于另一实施例中,影像输入装置2可为高画质多媒体接口(high definition multimedia interface, hdmi)、串列数字接口(serial digital interface, sdi)、电子数据处理(electronic data processing, edp)接口或移动产业处理接口(mobile industry processor interface, mipi)等,用以直接将数字影像输入至校正装置1中进行分析与处理。例如,所述影像输入装置2可为影像采集卡。
39.值得一提的是,校正装置1中的控制模组11亦可通过沟通接口,例如串列周边接口(serial peripheral interface, spi)、i2c接口等,连接影像输入装置2。于本实施例中,校正装置1可以通过控制模组11来对影像输入装置2进行参数设定,并且于影像输入装置2受到外部干扰而造成输入影像的异常时,控制模组11可通过上述沟通接口来直接重置影像输入装置。
40.于一实施例中,影像侦测模组12在接收即时影像后,将即时影像的影像格式转换为校正装置1可支持的影像格式。同时,影像侦测模组12还可侦测即时影像的基本影像资讯153,例如曝光强度、频率、每秒帧数(frame per second, fps)、有效影像垂直行数及有效影像水平像素数等。控制模组11从影像侦测模组12接收即时影像的所述基本影像资讯153,并且储存于校正装置1的储存装置15中。通过基本影像资讯153,校正装置1可以确认所接收的每一张即时影像的状态,进而判断是否需要对即时影像进行校正。
41.请同时参阅图1及图2,其中图2为输入影像示意图。如图所示,基于影像输入装置2所采用的解析度而定,每一张输入影像4都会基于固定的水平扫描频率(hsync)与垂直扫描频率(vsync)而形成特定尺寸的有效影像41(由有效行数及每一行的有效像素数所构成)、
无效的垂直空白行42(vertical blanking lines)、以及每一行中无效的水平空白像素43(horizontal blanking pixels)。于上述实施例中,校正装置1可依据在时间上相邻的两张或两张以上的即时影像的有效影像41、垂直空白行42、水平空白像素43等资讯来进行比对,当这些相邻的即时影像的基本影像资讯153的差异过大时,校正装置1可判断影像输入装置2已经发生异常。
42.如上所述,本发明的校正装置1可以通过基本影像资讯153来判断是否需要对即时影像进行校正。然而于另一实施例中,校正装置1亦可通过在时间上相邻的至少两张即时影像中的影像特征的特征差异,判断是否需要对即时影像进行校正(容后详述)。
43.请同时参阅图1及图3,其中图3为本发明的校正方法的流程图的第一具体实施例。图3结合图1所示的校正装置1,通过流程图说明校正装置1如何通过内部的控制模组11、影像侦测模组12、影像比对模组13及影像校正模组14来对影像输入装置2输入的即时影像进行校正。
44.如图3所示,校正装置1通过影像侦测模组12连接影像输入装置2,并且持续从影像输入装置2接收即时影像(步骤s10)。接着,校正装置1通过影像比对模组13执行分析演算法,以采集并分析即时影像中的影像特征(步骤s12)。
45.于一实施例中,所述分析演算法是基于预设尺寸的像素矩阵(例如4x4矩阵、8x8矩阵等)来采集即时影像中的一或多个特定分区的影像特征,并且通过对这些影像特征的分析来判断整张即时影像的状态。于此实施例中,校正装置1不需要储存、分析整张即时影像,借此可降低硬体需求,同时提高处理速度。
46.于一实施例中,所述分析演算法为移动向量演算法。本实施例中,校正装置1通过影像比对模组13计算任两张时间上相邻的即时影像中的相同影像特征的特征差异,并且基于此特征差异来计算各即时影像的所述影像特征相对于前一张影像的移动向量(步骤s14)。
47.更具体地说,由于校正装置1的硬体资源有限,因此,校正装置1可以仅通过储存装置15储存前一张影像151(即于时间点t-1接收的即时影像),并且计算当前即时影像(即于时间点t接收的即时影像)中的影像特征与前一张影像151中的相同影像特征之间的特征差异,进而计算当前即时影像中的影像特征相较于前一张影像151中的相同影像特征的移动向量152。并且,控制模组11从影像比对模组13取得所述移动向量152,并且记录于储存装置15中。
48.请同时参阅图4,为移动向量的示意图的第一具体实施例。如图4所示,本发明的影像比对模组13通过分析演算法的执行,于前一张影像51中采集出特定的影像特征511,并且于当前影像52中采集出相同的影像特征521。分析演算法通过内插(interpolation)计算相同影像特征511、521在两张影像51、52之间的偏移量,以计算当前影像52的影像特征521相对于前一张影像51的影像特征511的移动向量。
49.以当前影像52为例,由于影像特征521是移动到影像特征511的位置的邻近分区,因此分析演算法对两个影像特征511、521的位置进行计算后,可以得到整数关系的移动向量。
50.再如图4所示,分析演算法可于前一张影像51中采集出特定的影像特征511,并且于当前影像53中采集出相同的影像特征531。若以当前影像53为例,由于影像特征531并非
是直接移动到影像特征511的位置的邻近分区(而是位于子分区),因此分析演算法需对两个影像特征511、531的位置进行内插计算,以得到小数关系的移动向量。
51.续请同时参阅图5a,为移动向量的示意图的第二具体实施例。于图5a的实施例中,分析演算法可以使用具有六个权重(包括)的有限场脉冲响应滤波器(finite impulse response filter, fir filter),有限场脉冲响应滤波器可以基于整数字置关系执行内插计算,借此获得目标像素点的位置,进而计算移动分量。于图5a实施例中,分析演算法主要可以依据下列公式来计算一张影像中的目标像素点b、像素点s、像素点h与像素点m的位置:;;;。
52.续请同时参阅图5b,为移动向量的示意图的第三具体实施例。于图5b的实施例中,分析演算法主要可基于小数字置关系进行内插计算,以获得目标像素点的位置,进而计算移动分量。于图5b实施例中,分析演算法主要可以依据下列公式来计算目标像素点j的位置:上述内插计算为本技术领域的常用技术手段,于此不再赘述。
53.于上述实施例中,校正装置1的影像比对模组13主要是通过移动向量演算法来计算移动向量,借此判断即时影像的状态。举例来说,影像比对模组13可以计算任两张时间相邻的即时影像中的相同区域的亮度偏移量、色度偏移量、离散小波变换量(discrete wavelet transform, dwt)或一连续小波转换量(continous wavelet transform, cwt)等,做为所述特征差异,借此计算移动向量。然而,上述仅为本发明的部分具体实施例,但并不以此为限。
54.值得一提的是,于其他实施例中,影像比对模组13亦可采用以ai为基础的演算法(例如边缘运算(edge computing)演算法)来计算前后两张即时影像中的相同影像特征的差异,借此判断即时影像的变化状态。
55.回到图3。校正装置1通过控制模组11将影像比对模组13所计算的各即时影像的移动向量152记录于储存装置15中。并且,控制模组11基于累计的多笔于时间上连续的移动向量152来计算当前即时影像的移动轨迹预测值(步骤s16)。
56.具体地,校正装置1是从影像输入装置1持续接收即时影像,因此所接收的多张即时影像于时间上是有连续性的。因此,基于在先接收的多张影像(以三张为例,即为于时间点t-3, t-2, t-1所接收的影像)中的一或多个特定影像特征的移动向量152,控制模组11
可以在接收下一个即时影像之前,先行预测下一个即时影像中的相同影像特征的移动向量152,以做为所述移动轨迹预测值。换句话说,若校正装置1可于时间点t接收当前即时影像,则控制模组11可以在时间点t之前,基于在先接收的多张影像的移动向量152来预测当前即时影像的移动轨迹。
57.若影像输入装置1运作正常,则影像比对模组13所计算的当前即时影像的移动向量152,应该会相等于控制模组11先行预测的移动轨迹预测值,或者两者间的差异应该会小于阀值。
58.本发明中,控制模组11从影像比对模组13接收当前即时影像的移动向量152,并且将当前即时影像的移动向量152(为实际数值)与移动轨迹预测值(为预测数值)进行比对(步骤s18)。具体地,于步骤s18中,控制模组11计算当前即时影像的移动向量152与移动轨迹预测值间的差异(下称为第一差异),并且判断第一差异是小于预设的校正允许范围、落入校正允许范围、或是超出校正允许范围。
59.承上,若第一差异小于校正允许范围,代表当前即时影像(以及影像输入装置2)没有异常,或异常不严重。此时,校正装置1不需要对当前即时影像进行校正,因此控制模组11可发送第一指令给影像校正模组14,以控制影像校正模组14直接将当前即时影像输出至显示器3。若第一差异落入校正允许范围内,代表当前即时影像(或影像输入装置2)异常,但此异常情况尚在可以校正的范围内。此时,控制模组11可发送第二指令给影像校正模组14,以控制影像校正模组14先对当前即时影像进行校正后,再将校正后的影像输出至显示器3。
60.若第一差异超出校正允许范围,代表当前即时影像(或影像输入装置2)异常,并且已严重到无法校正的程度。此时,控制模组可发送第三指令给影像校正模组14,以控制影像校正模组14以预设影像取代当前即时影像来进行输出。如此一来,即时当前即时影像或影像输入装置2发生异常,校正装置1仍然能够令显示器3维持稳定的影像输出。
61.值得一提的是,本发明中,控制模组11、影像侦测模组12、影像比对模组13及影像校正模组是以管线(pipeline)的方式进行运作,以令校正装置1可以快速地对大量的连续影像进行校正,以维持维定的影像输出。
62.例如,于影像侦测模组12接收第一影像(对应至时间点t-3)时,影像比对模组13在计算第二影像(对应至时间点t-2)的移动向量,控制模组11在计算第三影像(对应至时间点t-1)所需的补偿值,而影像校正模组14对第四影像(对应至时间点t)进行校正并且将校正完成的影像对外输出。
63.上述管线的技术手段为本技术领域中的常用技术手段,于此不再赘述。
64.若于步骤s18中判断所述第一差异小于校正允许范围(即小于校正允许范围的下限值),则控制模组11可以输出当前即时影像的补偿值为0(步骤s20),并且控制影像校正模组14基于此补偿值来产生输出影像(步骤s22)。具体地,补偿值为0代表当前即时影像不需要被校正,换句话说,输出影像相等于当前即时影像。
65.若于步骤s18中判断第一差异落入校正允许范围内(即落在校正允许范围的下限值与上限值之间),则控制模组11依据当前即时影像的移动轨迹预测值以及移动向量152来计算补偿值(步骤s24)。并且,控制模组将所计算的补偿值输出至影像校正模组14(步骤s26),并控制影像校正模组14基于此补偿值来产生输出影像(步骤s22)。具体地,补偿值不为0代表当前即时影像需要被校正,换句话说,输出影像不等于当前即时影像。
66.于一实施例中,控制模组11于步骤s24中是计算当前即时影像的移动轨迹预测值及移动向量152的内插值的平均值,并以此平均值做为所述补偿值。举例来说,若当前即时影像中的其中一个影像特征的移动轨迹预测值为-0.9,移动向量152为-0.5,则控制模组11可经计算后判断此影像特征的较佳位置应为-0.7的位置(即),因此可计算出当前即时影像上的此影像特征的补偿值为-0.2。而上述仅为本发明的其中一个具体实施例,但并不以此为限。
67.值得一提的是,若影像校正模组14基于补偿值对当前即时影像进行校正后再输出,代表显示器3上显示的影像与影像输入装置2输入的影像不同。为了避免使用者受到校正后的影像的影响而造成误判,控制模组11可在产生补偿值的同时产生对应的警示信息(例如,“影像受到干扰,当前显示的影像为校正后的影像”)。本实施例中,影像校正模组14可同时将所产生的输出影像及所述警示信息输出至显示器3上,以提醒使用者注意。
68.若于步骤s18中判断第一差异超出校正允许范围,则控制模组11可发送指令至影像输入装置2,以重置(re-set)影像输入装置1(步骤s28),借此解决输入影像已经严重异常且无法校正的问题。
69.一般来说,重置前端的影像输入装置1仅需花费数秒钟,相较于重启整个影像系统(例如远端监控系统、医疗内视镜系统等),使用者并不致于受到太大的影响。以医疗领域为例,仅重置内视镜系统前端的内视镜(scope),而不重启整个内视镜系统,可以有效争取到黄金医疗时效。
70.并且,为了避免使用者在影像输入装置1重置的期间内无法获得相关资讯,或是令相关软件误判影像输入程序已经结果而自动关闭,校正装置1在控制影像输入装置1重置的期间内,会持续由控制模组11提供预设影像给影像校正模组14(步骤s30),借此,控制影像校正模组14可将预设影像直接做为输出影像(步骤s22)。直接以预设影像来取代当前即时影像,代表当前即时影像已经严重异常到无法校正的程序,因此在影像输入装置2重置期间,校正装置1先持续输出预设影像,令使用者可以持续看到稳定的画面输出。并且,当控制模组11感测到影像输入装置2重置完成后,再控制影像校正模组14恢复输出影像输入装置2所提供的即时影像。
71.于一实施例中,控制模组11会于每一次处理程序后都将前一张影像151记录于储存装置15中,并且随着时间的经过持续更新前一张影像151。由于前一张影像151与当前即时影像于时间上最为接近,因此影像差异最小。于一实施例中,控制模组11在步骤s30中是取得储存装置15中储存的前一张影像151并提供给影像校正模组14,以将前一张影像151做为所述预设影像。而上述仅为本发明的其中一个实施态样,但并不以此为限。
72.于图1的实施例中,是以储存装置15中仅储存单一张影像为例,然而在硬体资源充足的情况下,储存装置15中储存的影像数量并不以一张为限。
73.值得一提的是,若影像校正模组14将预设影像做为输出影像,代表显示器3上显示的影像与影像输入装置2输入的影像不相同。为了避免使用者受到输出影像的影响而误判,控制模组11可在提供预设影像给影像校正模组14的同时产生对应的警示信息(例如,“影像输入装置重置中,当前显示的影像并非即时影像”)。本实施例中,影像校正模组14可同时将输出影像及警示信息输出至显示器3上,以避免使用者的误判。
74.通过所述比对程序、判断程序、校正程序以及取代程序,校正装置1可以通过影像校正模组14持续提供输出影像(步骤s32)。并且,控制模组11可持续判断整个影像系统是否关机(步骤s34),并且于影像系统关机前持续执行步骤s10至步骤s32。借此,无论影像输入装置2是否异常,使用者均可持续于显示器3上获得稳定的影像。
75.于一实施例中,校正装置1可通过第一预设值与第二预设值来界定所述校正容许范围,其中第二预设值大于第一预设值。于步骤s18中,控制模组11是于当前即时影像的移动向量与移动轨迹预测值间的第一差异小于第一预设值时,判断第一差异小于校正容许范围而不需校正即时影像;于第一差异大于或等于第一预设值并且小于第二预设值时,判断第一差异落入校正容许范围内而需要校正即时影像;于第一差异大于第二预设值时,判断第一差异超出校正容许范围而无法校正即时影像。
76.于一实施例中,所述第一预设值为正负5%,所述第二预设值为正负30%。换句话说,若当前即时影像的移动向量与移动轨迹预测值的差值百分比小于正负5%,当前即时影像就不需要被校正;若当前即时影像的移动向量与移动轨迹预测值的差值百分比落在正负5%~正负30%之间,当前即时影像就需要被校正;若当前即时影像的移动向量与移动轨迹预测值的差值百分比大于正负30%时,当前即时影像就无法被校正。
77.而上述仅为本发明的其中一个具体实施范例,但并不以此为限。
78.续请同时参阅图1、图3及图6,其中图6为本发明的输出影像产生流程图的第一具体实施例。图6用以对图3中的步骤s22做更进一步的解释,说明校正装置1中的影像校正模组14如何在各种不同的情况下产生对应的输出影像。
79.如图6所示,于图3的步骤s22中,首先由影像校正模组14判断是否需要对当前即时影像进行校正(步骤s220)。本发明中,若控制模组11所产生的补偿值为0,则影像校正模组14可判断不需对当前即时影像进行校正。此时,影像校正模组14直接输出当前即时影像(步骤s222),以将当前即时影像直接做为输出影像。更具体地,于本实施例中,影像校正模组14是将当前即时影像加上补偿值(即为0),以产生输出影像。而由于补偿值为0,因此输出影像相等于当前即时影像。
80.若控制模组11产生的补偿值不为0,则影像校正模组14可判断需要对当前即时影像进行校正。此时,影像校正模组14将当前即时影像中的一或多个影像特征分别加上对应的补偿值(步骤s224),并且添加对应的警示信息(步骤s226),以产生所述输出影像。
81.若从控制模组11接收到所述预设影像,或是接收到读取预设影像的指令,则影像校正模组14可判断当前即时影像已严重异常而无法被校正。此时,影像校正模组14取得预设影像(步骤s228),并且添加对应的警示信息(步骤s230),以产生所述输出影像。于一实施例中,所述预设影像为与当前即时影像于时间上相邻的前一张影像(例如图1中的前一张影像151),但不以此为限。
82.步骤s222、步骤s226或步骤s230后,影像校正模组14即可进一步执行图3的步骤s32,以持续输出影像校正模组145产生的输出影像。借此,无论当前即时影像的状态为何,本发明的校正装置1均可持续且稳定地通过显示器3提供可供使用者视察的影像。
83.于上述图3的实施例中,校正装置1主要是基于当前即时影像的移动向量与移动轨迹预测值的差异,判断是否需对当前即时影像进行校正。然而如前文所述,影像侦测模组12可在接收即时影像的同时,侦测所接收的每一张即时影像的基本影像资讯。于其他实施例
中,校正装置1还可通过当前即时影像的基本影像资讯与在先的一或多张影像的基本影像资讯的差异,判断是否需对当前即时影像进行校正。
84.请同时参阅图1及图7,其中图7为本发明的校正方法的流程图的第二具体实施例。本实施例中,校正装置1通过影像侦测模组12连接影像输入装置2,以持续接收即时影像(步骤s40),并且,影像侦测模组12持续侦测并记录所接收的即时影像的基本影像资讯153(步骤s42)。
85.于一实施例中,所述基本影像资讯153可例如为即时影像的曝光强度、频率、每秒帧数、有效影像垂直行数、有效影像水平像素数等,但不以此为限。
86.步骤s42后,校正装置1通过影像比对模组13分析各即时影像的影像特征,并且通过控制模组11与影像比对模组13计算当前即时影像的移动向量152以及移动轨迹预测值(步骤s44)。所述移动向量152与移动轨迹预测值的计算方式与图3所示者相同,于此不再赘述。
87.本实施例中,校正装置1的控制模组11可计算当前即时影像的移动向量152与移动轨迹预测值的差异(下称为第一差异),并且计算当前即时影像的基本影像资讯153与累计的一或多张在先的即时影像的基本影像资讯153间的差异(下称为第二差异)。借此,控制模组11可以基于第一差异以及第二差异的数值来判断是否需对当前即时影像进行校正(步骤s46)。
88.举例来说,若一或多张在先的即时影像的基本影像资讯153指出,各所述即时影像中属于有效影像的垂直行数为1920行,但当前即时影像的基本影像资讯153指出,当前即时影像中属于有效影像的垂直行数为1900行。此时,控制模组11可判断虽然当前即时影像的基本影像资讯153与在先的即时影像的基本影像资讯153具有所述第二差异,但第二差异的数值小于校正允许范围,属于不严重而不需要被校正的情况。
89.再例如,若一或多张在先的即时影像的基本影像资讯153指出,各所述即时影像中属于有效影像的垂直行数为1920行,但当前即时影像的基本影像资讯153指出,当前即时影像中属于有效影像的垂直行数为1800行。此时,控制模组11可以基于第二差异的数值判断当前即时影像需要进行校正。
90.再例如,若一或多张在先的即时影像的基本影像资讯153指出,各所述即时影像中属于有效影像的垂直行数为1920行,但当前即时影像的基本影像资讯153指出,当前即时影像中属于有效影像的垂直行数仅为150行。此时,控制模组11可以基于第二差异的数值判断当前即时影像已严重异常,而无法进行校正。
91.如图7所示,若所述第一差异及第二差异均小于预设的校正允许范围(例如小于第一门槛值),表示当前即时影像不需被校正。因此,控制模组11输出补偿值为0(步骤s48),并且控制影像校正模组14基于在步骤s48中输出的补偿值来产生输出影像(步骤s50)。本实施例中,影像校正模组14是将当前即时影像中加上补偿值,以产生输出影像。由于补偿值为0,因此输出影像相等于当前即时影像。
92.若所述第一差异及第二差异均落入校正允许范围内(例如大于或等于第一门槛值并小于第二门槛值),表示当前即时影像需要被校正。因此,控制模组11基于当前即时影像的移动向量152以及移动轨迹预测值来计算对应的补偿值(步骤s52)。并且,控制模组11输出补偿值至影像校正模组14(步骤s54),借此控制影像校正模组14基于在步骤s54中输出的
补偿值来产生输出影像(步骤s50)。
93.于步骤s52中,控制模组11主要是计算当前即时影像的移动向量152与移动轨迹预测值的内插值的平均值,并以此平均值做为补偿值。于步骤s54中,影像校正模组14是将当前即时影像中的一或多个影像特征分别加上对应的补偿值,以产生输出影像。由于补偿值不为0,因此输出影像相异于当前即时影像。值得一提的是,于此实施例中,影像校正模组14同时添加所述警示信息至输出影像中,以提醒使用者目前显示器3上所显示的影像是经过校正的影像,与影像输入装置2实际输入的影像具有区别。
94.若所述第一差异及第二差异均超出校正允许范围(例如大于第二门槛值),表示当前即时影像已严重异常而无法被校正。因此,控制模组11直接发出控制命令至影像输入装置2,以重置影像输入装置2(步骤s56)。并且,控制模组11输出预设影像(例如储存装置15中储存的前一张影像151)给影像校正模组14(步骤s58),借此控制影像校正模组14可将在步骤s58中得到的预设影像直接做为输出影像(步骤s50)。
95.本实施例中,影像校正模组14亦会同时添加所述警示信息至输出影像中,以提醒使用者目前显示器3上所显示的影像并非是影像输入装置2当前实际输入的即时影像。
96.步骤s50后,校正装置1可通过影像校正模组14来持续提供所产生的输出影像(步骤s60)。并且,校正装置1通过控制模组11持续判断影像系统是否关机(步骤s62),并于影像系统关机前持续执行步骤s40至步骤s60。借此,无论影像输入装置2是否受到干扰,当前即时影像是否异常,校正装置1将可持续且稳定地输出影像。
97.以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1