一种融合雷达与AIS的船舶精确关联方法与流程
一种融合雷达与ais的船舶精确关联方法
技术领域
1.本发明涉及多源信息融合以及船舶交通管理系统领域,特别是一种融合雷达与ais的船舶精确关联方法。
背景技术:
2.随着经济快速发展,信息化手段的不断提升,船舶交通管理系统(vessel traffic services,vts)需要不断增强系统信息获取以及信息综合处理与应用的手段和能力,以满足用户对于安全、高效、便捷vts的强烈需求。船舶行业中水运行业的业务量居高不下,用于运输上船舶密度的增加,同时也增加了海上航行安全的风险,海上交通事故频频发生,海洋环境受损程度日益严重,使得现场环境变得不可控制。因此,为了有效解决上述所述问题,航运管理效率的提高以及充分利用当前海上通用的传感器成了船舶管理中必不可少的部分。船舶交通管理系统通过先进的多传感器融合技术、信息管理技术、高精度信息处理技术、数字通信技术,定位导航技术等,确保海上航行安全,减少人员伤亡,推动海事业务的发展。雷达与ais作为当前船舶交通管理系统中最重要的两种传感器,为船舶目标的通行保驾护航,早期的雷达只能提供目标的距离、方位信息,现在的雷达还可以提供目标的航速、航向、加速度、船首向等。而船载ais设备通过ais基站可以收集到的信息有船首向、经纬度、航速、航向等。单一传感器对船舶数据的获取有着一定的误差,进而影响到航迹关联。例如:ais信息有延迟、信息交互不实时,雷达定位被同频干扰,雷达目标在盲区等。
3.因而,不能把雷达或ais作为导航中唯一的传感器,如何将雷达获取到的船舶信息与ais获取到的船舶信息进行精确关联,保障船舶航行安全,势在必行。
技术实现要素:
4.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种融合雷达与ais的船舶精确关联方法,该融合雷达与ais的船舶精确关联方法通过建立多因素模糊集模型,计算出双传感器船舶目标航迹关联相似度,然后多周期性判决出最优关联航迹,具有准确度高、可靠性强、容错率高等优点,在复杂多目标的场景下也能实现了船舶信息的准确可靠关联。
5.为解决上述技术问题,本发明采用的技术方案是:
6.一种融合雷达与ais的船舶精确关联方法,包括如下步骤。
7.步骤1、获取雷达与ais船舶信息:采用雷达和ais同时获取船舶信息;获取的船舶信息包括船舶位置坐标、航速、航向、船首向和加速度。
8.步骤2、坐标转换:将步骤1中雷达获取的船舶位置坐标和步骤1中ais获取的船舶位置坐标,均转换至平面直角坐标。
9.步骤3、时间同步校准:将雷达数据的时间与ais数据的时间进行校对与同步。
10.步骤4、建立六因素模糊集模型:基于距离、方位、航速、航向、船首向和加速度,建立六因素模糊集模型(η1(t),η2(t),η3(t),η4(t),η5(t),η6(t));六因素对应的权重系数分
别为φ1、φ2、φ3、φ4、φ5、φ6;其中:
11.η1(t)表示在t时刻雷达和ais关于距离因素的欧式距离。
12.η2(t)表示在t时刻雷达和ais关于方位因素的欧式距离。
13.η3(t)表示在t时刻雷达和ais关于航速因素的欧式距离。
14.η4(t)表示在t时刻雷达和ais关于航向因素的欧式距离;
15.η5(t)表示在t时刻雷达和ais关于船首向因素的欧式距离;
16.η6(t)表示在t时刻雷达和ais关于加速度因素的欧式距离;
17.步骤5、计算六因素之间的门限值ε,具体计算公式为:
[0018][0019]
εk=3/(8πλk)
[0020][0021]
式中,φk表示第k因素对应的权重系数;其中,k=1、2、3、4、5、6,分别对应因素为距离、方位、航速、航向、船首向和加速度。
[0022]
εk表示第k因素对应的预制系数;λk是表示k个不同因素欧式距离的均方根。
[0023]
步骤6、计算六因素的总相似度γ,具体计算公式为:
[0024][0025]
步骤7、一次航迹关联匹配:在t时刻,将步骤5计算的门限值ε和步骤6计算的总相似度γ进行比较,当γ≥ε时,则将当前的雷达目标与ais目标航迹进行一次匹配关联。
[0026]
步骤8、二次航迹关联匹配:步骤7中,在t时刻,当与雷达目标一次匹配关联的ais目标航迹的数量n>1时,需多周期地计算每个ais目标航迹与雷达目标的总相似度,并将最大总相似度所对应的ais目标航迹,作为最优ais目标航迹,然后,将最优ais目标航迹与雷达目标进行二次航迹关联匹配。
[0027]
步骤8中,多周期下每个ais目标航迹与雷达目标总相似度的计算公式为:
[0028][0029]
其中,t=l表示当前时刻,也称第一周期;t=l表示距离当前时刻的第l个周期,l>1;γn表示l个周期下第n个ais目标与雷达目标的总相似度,γn(t)表示t时刻下第n个ais目标与雷达目标的总相似度,且γn(t)=γ。
[0030]
步骤4中,φ1=φ2>φ3>φ4>φ5>φ6。
[0031]
φ1=φ2=0.3,φ3=0.2,φ4=0.1,φ5=0.06,φ6=0.04。
[0032]
η1(t),η2(t),η3(t),η4(t),η5(t),η6(t)的计算公式分别为:
[0033]
η1(t)=|rr(t)-ra(t)|
ꢀꢀꢀꢀꢀ
(7)
[0034]
η2(t)=|θr(t)-θa(t)|
ꢀꢀꢀꢀꢀꢀ
(8)
[0035]
η3(t)=|vr(t)-va(t)|
ꢀꢀꢀꢀꢀꢀ
(9)
[0036]
η4(t)=|cr(t)-ca(t)|
ꢀꢀꢀꢀ
(10)
[0037]
η5(t)=|or(t)-oa(t)|
ꢀꢀꢀꢀ
(11)
[0038]
η6(t)=|ar(t)-aa(t)|
ꢀꢀꢀꢀ
(12)
[0039]
式中:rr(t)表示在t时刻雷达获取的距离值,ra(t)表示在t时刻ais获取的距离值。
[0040]
θr(t)表示在t时刻雷达获取的方位值,θa(t)表示在t时刻ais获取的方位值。
[0041]vr
(t)表示在t时刻雷达获取的航速,va(t)表示在t时刻ais获取的航速。
[0042]cr
(t)表示在t时刻雷达获取的航向,ca(t)表示在t时刻ais获取的航向。
[0043]
or(t)表示在t时刻雷达获取的船首向,oa(t)表示在t时刻ais获取的船首向。
[0044]ar
(t)表示在t时刻雷达获取的加速度,aa(t)表示在t时刻ais获取的加速度。
[0045]
步骤3中,采用埃尔米特插值法拟合数据,实现雷达数据和ais数据时间同步校准。
[0046]
本发明具有如下有益效果:
[0047]
1.本发明建立的多因素模糊集关联匹配模型,综合考虑到了船舶的距离、方位、航速、航向、船首向、加速度等信息对于船舶航迹关联的影响,针对于多目标密集区船舶以及不同运动模式下的船舶,具有准确度高、容错率高等优点,在复杂多目标的场景下也能实现了船舶信息的准确可靠关联,比传统基于雷达与ais融合关联算法的适用性更广,可靠性更高。
[0048]
2.本发明中使用多周期性判决相似度,主要考虑到多因素模糊集关联模型中如果关联匹配的航迹不唯一,则需要通过在时间维度上寻找最优关联航迹,该方法进一步提高了航迹关联的精度。
附图说明
[0049]
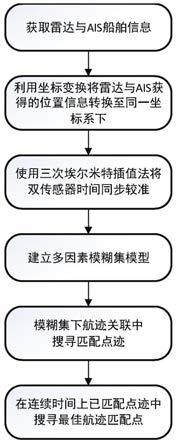
图1显示了本发明一种融合雷达与ais的船舶精确关联方法的流程图。
[0050]
图2显示了雷达与ais目标的关联示意图。
具体实施方式
[0051]
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
[0052]
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
[0053]
如图1所示,一种融合雷达与ais的船舶精确关联方法,包括如下步骤。
[0054]
步骤1、获取雷达与ais船舶信息
[0055]
采用雷达和ais同时获取船舶信息,其中,雷达探测到的船舶目标为雷达目标,ais提供信息的船舶目标为ais目标。两者获取的船舶信息包括船舶位置坐标、航速、航向、船首向和加速度。
[0056]
步骤2、坐标转换
[0057]
在当前时刻下,针对水上航行的船舶,将雷达获取到的船舶位置坐标(r,θ)转换至平面直角坐标系下的坐标xr,yr:
[0058][0059]
上式中,r是雷达目标与坐标原点之间的距离,θ表示雷达目标相对于坐标原点的方位。
[0060]
针对ais提供的船舶位置坐标(l,b),使用高斯-克吕格投影算法将其换至平面直角系下的坐标为xa,ya,其中,l与b分别表示船舶目标在wgs-84坐标系中纬度与经度信息。高斯-克吕格投影算法为现有技术,这里不再赘述。
[0061]
步骤3、时间同步校准:采用埃尔米特插值法,将雷达数据的时间与ais数据的时间进行校对与同步。埃尔米特插值法校准时间,为现有技术,这里不再赘述。
[0062]
步骤4、建立六因素模糊集模型:基于距离、方位、航速、航向、船首向和加速度,建立六因素模糊集模型(η1(t),η2(t),η3(t),η4(t),η5(t),η6(t));其中:
[0063]
η1(t)表示在t时刻雷达和ais关于距离因素的欧式距离。
[0064]
η2(t)表示在t时刻雷达和ais关于方位因素的欧式距离。
[0065]
η3(t)表示在t时刻雷达和ais关于航速因素的欧式距离。
[0066]
η4(t)表示在t时刻雷达和ais关于航向因素的欧式距离;
[0067]
η5(t)表示在t时刻雷达和ais关于船首向因素的欧式距离;
[0068]
η6(t)表示在t时刻雷达和ais关于加速度因素的欧式距离。
[0069]
上述η1(t),η2(t),η3(t),η4(t),η5(t),η6(t)的计算公式分别为:
[0070]
η1(t)=|rr(t)-ra(t)|
ꢀꢀꢀ
(14)
[0071]
η2(t)=|θr(t)-θa(t)|
ꢀꢀꢀꢀꢀ
(15)
[0072]
η3(t)=|vr(t)-va(t)|
ꢀꢀꢀꢀꢀ
(16)
[0073]
η4(t)=|cr(t)-ca(t)|
ꢀꢀꢀꢀ
(17)
[0074]
η5(t)=|or(t)-oa(t)|
ꢀꢀꢀꢀ
(18)
[0075]
η6(t)=|ar(t)-aa(t)|
ꢀꢀꢀꢀ
(19)
[0076]
式中:
[0077]rr
(t)表示在t时刻雷达获取的距离值,ra(t)表示在t时刻ais获取的距离值。
[0078]
θr(t)表示在t时刻雷达获取的方位值,θa(t)表示在t时刻ais获取的方位值。
[0079]vr
(t)表示在t时刻雷达获取的航速,va(t)表示在t时刻ais获取的航速。
[0080]cr
(t)表示在t时刻雷达获取的航向,ca(t)表示在t时刻ais获取的航向。
[0081]
or(t)表示在t时刻雷达获取的船首向,oa(t)表示在t时刻ais获取的船首向。
[0082]ar
(t)表示在t时刻雷达获取的加速度,aa(t)表示在t时刻ais获取的加速度。
[0083]
上述六因素对应的权重系数分别为φ1、φ2、φ3、φ4、φ5、φ6,其中,φ1=φ2>φ3>φ4>φ5>φ6。
[0084]
本实施例中,优选为:
[0085]
φ1=φ2=0.3,φ3=0.2,φ4=0.1,φ5=0.06,φ6=0.04。
[0086]
上述六因素模糊集模型建立完成后,若使用传统的数据关联算法,当遇到一些非高斯线性的场景,目标状态无法稳定,周围杂波产生的航迹会对真实的雷达或者ais航迹造成干扰,因此使用传统的关联算法(即选择固定阈值)使得航迹关联概率的正确率较低,结果不理想。
[0087]
因此,根据多因素计算出综合关联门限值代替传统的固定阈值来对雷达以及ais进行关联,可以提高复杂场景下目标关联的成功率,并且也提升了精确度。
[0088]
步骤5、计算六因素之间的门限值ε,具体计算公式为:
[0089][0090]
εk=3/(8πλk)
[0091][0092]
式中,φk表示第k因素对应的权重系数;其中,k=1、2、3、4、5、6,分别对应因素为距离、方位、航速、航向、船首向和加速度。
[0093]
εk表示第k因素对应的预制系数;λk是表示k个不同因素欧式距离的均方根。
[0094]
步骤6、计算六因素的总相似度γ,具体计算公式为:
[0095][0096]
步骤7、一次航迹关联匹配:在t时刻,将步骤5计算的门限值ε和步骤6计算的总相似度γ进行比较,当γ≥ε时,则将当前的雷达目标与ais目标航迹进行一次匹配关联。
[0097]
步骤8、二次航迹关联匹配:步骤7中,在t时刻,当与雷达目标一次匹配关联的ais目标航迹的数量n>1时,如图2所示,n=10。此时,需多周期地计算每个ais目标航迹与雷达目标的总相似度,并将最大总相似度所对应的ais目标航迹,作为最优ais目标航迹,然后,将最优ais目标航迹与雷达目标进行二次航迹关联匹配。
[0098]
步骤8中,多周期下每个ais目标航迹与雷达目标总相似度的计算公式为:
[0099][0100]
其中,t=1表示当前时刻,也称第一周期;t=l表示距离当前时刻的第l个周期,l>1;γn表示l个周期下第n个ais目标与雷达目标的总相似度,γn(t)表示t时刻下第n个ais目标与雷达目标的总相似度,且γn(t)=γ。
[0101]
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1