基于全天候观测误差协方差矩阵的数值天气预报方法
1.本发明属于数值天气预报技术领域,尤其涉及基于全天候观测误差协方差矩阵的数值天气预报方法。
背景技术:
2.数值天气预报(nwp)是一个典型的偏微分方程初边值问题。随着数值模式预报模式的逐渐完善,初值条件的准确性越来越被认为是数值天气预报领域一个重要方面,它直接影响着数值预报的成败。与此同时,随着观测技术的发展,观测信息量及种类的不断增多,如何有效利用这些观测信息,提供更准确的初值成为数值天气预报研究的核心。资料同化通过融合可获得的各种已知信息(包括观测、模式以及相应的误差统计信息等)来改进模式的初始条件。红外高光谱等气象卫星观测可以从大气层外实现全天候(all-sky)条件下的对地探测,不受地表类型的限制,并且具有信息量大、时空分辨率高等特点,能有效填补常规观测难以探测的“信息盲区”。自从使用变分同化处理卫星资料以来,数值预报得到了明显的改进,以欧洲中期天气预报中心(ecmwf)业务化的四维变分资料同化(4dvar)系统为例,90%的观测信息来源于卫星资料。
3.观测误差协方差矩阵,在变分同化系统中起着十分重要的作用,它决定了观测观测信息的重要性以及这些信息在空间和不同变量之间的扩散方式。观测误差协方差矩阵的非零元素越多,能从观测资料中提取的信息也就越多,从这个意义上说,观测误差协方差矩阵应该尽可能是满矩阵。一般而言,构成观测误差协方差对角元素的方差主要表示仪器误差,这部分信息容易获取;非对角元素表征观测之间的相关性,由后验估计而来,相对难以进行准确的估计。从资料同化开始发展以来,背景误差协方差矩阵已经发展到相当复杂的程度,但是观测误差协方差却极为简单,通常忽略非对角元素只考虑由对角元素构成的方差。例如,同化红外高光谱卫星资料时,简单假设观测之间误差不相关,相应进行视场稀疏化且选择不相邻的通道,其误差方差一般根据统计经验给定。
4.为了弥补观测误差协方差矩阵未考虑误差相关性的不足,通常观测误差被人为放大即观测误差膨胀技术,使得观测在分析中的权重和真实的权重一致。然而卫星资料的观测误差具有多样性,不仅仅包含仪器误差还包含代表性误差等,且观测之间存在相关性。这些相关性不仅包含空间相关,尤其对于红外高光谱的成千上万通道存在较强的通道相关。有研究表明这些通道间的误差相关程度随大气状况变化,晴空(clear-sky)条件下相关程度小,全天候云雨条件下通道相关程度更显著。目前有研究初步尝试了在观测误差协方差矩阵中对红外高光谱资料考虑通道之间的相关,利用后验信息诊断出通道的相关系数和误差方差,但是未充分考虑全天候条件下观测误差随云水的实时变化。
5.目前ecmwf等数值预报中心业务资料同化系统主要采用晴空同化方法对红外高光谱资料进行同化,其资料同化系统中使用的观测误差协方差模型较为简单,难以对全天候条件下云雨区红外高光谱资料的误差水平进行准确描述。充分发挥红外高光谱观测资料的数值模拟应用价值,需要借助先进的观测误差协方差模型构建全天侯资料同化系统。这种
误差模型应该实时随云水状况而变化,与视场内的云水物质建立密切的联系。
6.目前的红外高光谱资料四维变分同化方法一定程度上由于观测误差协方差模型较为简单,仅能实现对晴空视场和全云视场云顶以上不受云影响的通道进行同化,可用的有效观测非常有限(大约不到总观测数目的10%),没有充分发挥红外高光谱资料的应用价值。
技术实现要素:
7.有鉴于此,本发明提出了基于全天候观测误差协方差矩阵的数值天气预报方法,针对当前业务变分同化系统采用的观测误差协方差模型不能准确描述全天候条件下红外高光谱观测误差通道相关和观测误差方差水平的问题,提出一种基于云场景的红外高光谱全天候观测误差协方差模型,解决基于云特征函数的红外高光谱观测误差协方差通道相关技术、基于云量的观测误差方差膨胀技术;
8.本发明公开的基于全天候观测误差协方差矩阵的数值天气预报方法,包括以下步骤:
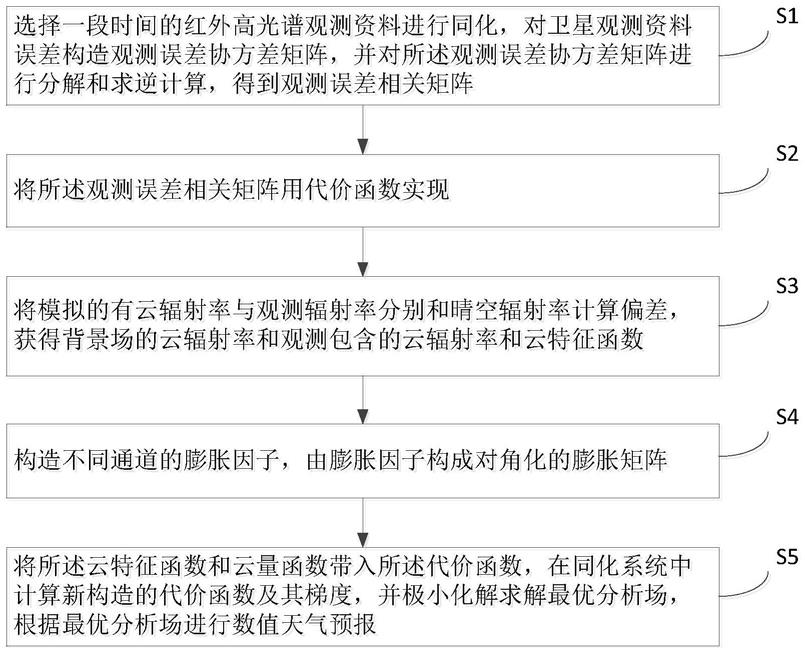
9.s1:选择一段时间的红外高光谱观测资料进行同化,对卫星观测资料误差构造观测误差协方差矩阵,并对所述观测误差协方差矩阵进行分解和求逆计算,得到观测误差相关矩阵;
10.s2:将所述观测误差相关矩阵用代价函数实现;
11.s3:将模拟的有云辐射率与观测辐射率分别和晴空辐射率计算偏差,获得背景场的云辐射率和观测包含的云辐射率和云特征函数;
12.s4:构造不同通道的膨胀因子,由所述膨胀因子构成对角化的膨胀矩阵;
13.s5:将所述云特征函数和云量函数带入所述代价函数,在同化系统中计算新构造的代价函数及其梯度,并极小化解求解最优分析场,根据最优分析场进行数值天气预报。
14.进一步地,s1的步骤包括如下子步骤:
15.s11:选择一段时间的红外高光谱观测资料进行同化,对卫星观测资料误差进行诊断分析,利用后验观测误差协方差矩阵计算公式计算所述观测误差协方差矩阵,后验观测误差协方差矩阵计算如下:
[0016][0017]
其中e[]表示求数学期望,为观测和分析的差值;
[0018]
s12:分别针对每个通道组合统计其协方差,得到观测误差协方差矩阵,其中,第i个通道和第j个通道观测误差协方差r(i,j)为:
[0019][0020]
s13:由每个通道间的观测误差协方差r(i,j)构建观测误差协方差矩阵r的元素。
[0021][0022]
s14:将所述红外高光谱观测资料误差协方差矩阵进行块对角化分解;
[0023]
s15:将块对角化观测误差协方差矩阵rk进行对角化转换,采用经验正交展开方法实现,步骤如下:
[0024]rk
=∑c∑
[0025]
其中,∑为观测误差标准差矩阵,属于对角矩阵,对角元素为第i个通道的观测误差标准差σi,c为观测误差通道间相关系数矩阵;
[0026]
s16:对分解后的观测误差协方差矩阵rk进行求逆求逆公式如下:
[0027][0028]
其中,λ是由观测误差通道间相关系数矩阵c矩阵的特征值λj组成的对角矩阵,e是由观测误差通道间相关系数矩阵c矩阵的特征向量ej组成的正交矩阵。
[0029]
进一步地,所述代价函数j包含观测项jo和背景场项jb,表示为:
[0030]
j=jo+jb[0031]
代价函数观测项jo表示为:
[0032][0033]
其中,d为观测增量,σo为观测误差标准差,采用增量方式求解代价函数时,所述观测项jo的梯度为:
[0034][0035]
其中,h
t
为切线性观测算子的转置,其列向量为hi,用于衡量观测对大气状态变化的敏感度,σo为观测误差标准差。
[0036]
进一步地,云特征函数c
cld
计算如下:
[0037][0038]
其中h
clr
(xb)为云辐射率,h
cld
(xb)为晴空辐射率。
[0039]
进一步地,构造不同通道j的膨胀因子sj,由si构成一个对角化的膨胀矩阵s,对观测误差进行膨胀:
[0040]
r=es
0.5
λs
0.5et
≡esλe
t
,
[0041]
其中e是由观测误差通道间相关系数的矩阵的特征向量ej组成的正交矩阵。
[0042]
进一步地,第一特征值膨胀因子为s1,其它特征值膨胀系数设置为常数,即sj的取值策略表示为:
[0043][0044]
其中,s1表示为:
[0045][0046]
a为晴空条件下最小膨胀比例因子系数,b为云条件下最大膨胀比例因子系数,ca为云量函数。
[0047]
进一步地,所述云量函数ca由模拟云量cm和观测云量co计算而来,表示如下:
[0048]cm
=b
cld-b
clr
[0049]co
=o
cld-b
clr
[0050]
ca=(cm+co)/2
[0051]
其中b
cld
表示rttov对有云廓线模拟的亮温,b
clr
表示rttov对有云廓线模拟的亮温,o
cld
则表示观测的有云亮温。
[0052]
本发明的有益效果如下:
[0053]
针对卫星红外高光谱观测资料中上对流层水汽通道,研究基于云特征函数观测误差相关的观测误差协方差模型,通过对视场内云特征函数的构造,获得观测误差协方差矩阵误差相关的特征偏差和特征雅各比,有效利用观测误差相关对红外高光谱资料进行同化。
[0054]
面向红外高光谱全天候观测误差协方差的应用需求,提出了基于云量的观测误差膨胀技术,建立观测误差方差随云量变化的函数对应关系,探索不同特征通道采用不同的云量膨胀数值和观测误差协方差特征值阈值截断膨胀方案,为实现不同误差水平的通道对代价函数产生不同程度的影响提供有效的、实用的途径。
附图说明
[0055]
图1本发明基于全天候观测误差协方差矩阵的数值天气预报方法流程图。
具体实施方式
[0056]
下面结合附图对本发明作进一步的说明,但不以任何方式对本发明加以限制,基于本发明教导所作的任何变换或替换,均属于本发明的保护范围。
[0057]
如图1所示,本发明基于全天候观测误差协方差矩阵的数值天气预报方法,方法的步骤如下:
[0058]
s1:选择一段时间的红外高光谱观测资料进行同化,对卫星观测资料误差构造观测误差协方差矩阵,并对所述观测误差协方差矩阵进行分解和求逆计算,得到观测误差相关矩阵。
[0059]
在全天候观测条件下,红外高光谱受云水影响,误差水平相对于晴空观测要复杂,观测误差模式的构建对于同化全天候红外高光谱观测资料非常关键。首先利用同化系统的后验信息来诊断晴空条件下的红外高光谱观测误差协方差矩阵,为引入云水影响构建基础观测误差协方差矩阵。具体步骤如下:
[0060]
s11:选择一段时间的红外高光谱观测资料进行同化,卫星观测资料误差进行诊断分析,利用后验观测误差协方差矩阵计算公式计算giirs(干涉式大气垂直探测仪)观测误差协方差矩阵。
[0061][0062]
其中e[]表示求数学期望,表示观测和背景场的差值(信息增量或称为观测增量),其中xb为背景场,y为卫星giirs观测值,h为观测算子,如果考虑偏差订正,那么其中b为偏差订正参数。为观测和分析的差值,其中δxa为分析增量。假设误差为高斯分布,观测和背景的误差不相关,并且分析中观测的权重与使用真实误差特征时相同,则
[0063]
s12:分别针对每个通道组合统计它们的协方差。其中,第i个通道和第j个通道观测误差协方差r(i,,)为:
[0064][0065]
s13:由每个通道间的观测误差协方差r(i,j)构建观测误差协方差矩阵r的元素。
[0066][0067]
s14:利用s12步骤中诊断的红外高光谱观测资料误差协方差矩阵进行块对角化分解。其中,假设选定研究的水汽通道误差协方差块为rk(考虑观测误差相关,则为n
×
n维的方阵),表示整个红外高光谱通道集合的第k个观测集合中n个通道的观测误差协方差矩阵,如果拟定选择7个giirs水汽通道,则n=7。
[0068]
s14:对s13获得的块对角化观测误差协方差矩阵rk进行对角化转换,采用经验正交展开等方法实现。
[0069]rk
=∑c∑
[0070]
其中,∑为观测误差标准差矩阵,属于对角矩阵,对角元素为即第i个通道的观测误差标准差σi,c为观测误差通道间相关系数的矩阵。
[0071]
s15:对s14分解后的rk进行求逆求逆公式如下:
[0072][0073][0074]
需要对系数矩阵再进行矩阵分解,则表示为:
[0075][0076]
其中,λ是由c矩阵的特征值λj组成的对角矩阵,e是由c矩阵的特征向量ej组成的正交矩阵。
[0077]
s2:观测误差相关矩阵在代价函数中的实现
[0078]
资料同化代价函数j包含观测项jo和背景场项jb,表示为:
[0079]
j=jo+jb[0080]
当不考虑通道相关时,r为只考虑方差的对角矩阵,代价函数观测项jo表示为:
[0081][0082]
其中,d为观测增量,采用增量方式求解代价函数时,则观测项的梯度为:
[0083][0084]
其中,h
t
为切线性观测算子的转置,也称为雅各比矩阵,其列向量为hi,通常用来衡量观测对大气状态变化的敏感度。
[0085]
当考虑通道相关时,r矩阵求逆不能简单表示为方差对角阵的求逆,需要使用观测误差相关系数矩阵分解后的形式求逆,代价函数观测项表示为:
[0086][0087]
其中,为特征向量的转置,为特征偏差项,λj为观测误差通道间相关系数的矩阵的特征值。
[0088]
对应观测项的梯度为:
[0089][0090]htej
为特征雅各比,用来衡量观测对大气状态变化的敏感度。
[0091]
s3:将模拟的有云辐射率与观测辐射率分别和晴空辐射率计算偏差,获得背景场的云辐射率和观测包含的云辐射率和云特征函数。
[0092]
对于云特征函数和云量的计算,都需要使用rttov快速辐射传输模式对通道分别计算有云辐射率h
clr
(xb)和晴空辐射率h
cld
(xb)。以受云影响最大的也就是权重函数位于最底层通道为研究对象,然后将模拟的有云辐射率与观测辐射率分别和晴空辐射率计算偏差,即以模拟晴空辐射率为参考基础,获得背景场的云辐射率和观测包含的云辐射率,最后进行加权平均,获得云特征函数c
cld
:
[0093][0094]
当考虑通道相关时,表示为标准化特征信息增量项,使用c
cld
替代,则能实现在观测误差模型中考虑基于云特征的误差相关。
[0095]
s4:构造不同通道的膨胀因子,由所述膨胀因子构成对角化的膨胀矩阵;
[0096]
对于观测误差标准差考虑云量的影响,需要构造不同通道j的膨胀因子sj,由si构成一个对角化的膨胀矩阵s。
[0097][0098]
因此,观测误差进行膨胀可以表示为:
[0099]
r=es
0.5
λs
0.5et
≡esλe
t
[0100]rk
矩阵的特征值膨胀拟定采取分特征值类型的策略,第一特征值膨胀因子为s1,其他特征值膨胀系数设置为1(或者其他常数进行膨胀,需要根据试验进行测试获得经验值),
即sj的取值策略可以表示为:
[0101][0102]
其中,s1表示为:
[0103][0104]
a为晴空条件下最小膨胀比例因子系数(比如取值为0.2),b为云条件下最大膨胀比例因子系数(比如取值3.2),ca为云量函数。
[0105]
云量函数ca由模拟云量cm和观测云量co计算而来,表示如下:
[0106]cm
=b
cld-b
clr
[0107]co
=o
cld-b
clr
[0108]
ca=(cm+co)/2
[0109]
其中b
cld
表示rttov对有云廓线模拟的亮温,b
clr
表示rttov对有云廓线模拟的亮温,o
cld
则表示观测的有云亮温。当使用辐射率亮温表示云量时,云量函数ca与云特征函数c
cld
具有等价性。
[0110]
s5:将所述云特征函数和云量函数带入所述代价函数,在同化系统中计算新构造的代价函数及其梯度,并极小化解求解最优分析场,根据最优分析场进行数值天气预报。
[0111]
将s3和s4步骤计算得到的云特征函数和云量函数应用于s2步骤中的代价函数观测项,实现基于云场景的观测误差协方差模型和相应同化代价函数。
[0112]
在同化系统中计算新构造的代价函数及其梯度,并极小化解求解最优分析场,并验证代价函数的收敛性。
[0113]
本发明的有益效果如下:
[0114]
针对fy-4a卫星红外高光谱观测资料中上对流层水汽通道,研究基于云特征函数观测误差相关的观测误差协方差模型,通过对视场内云特征函数的构造,获得观测误差协方差矩阵误差相关的特征偏差和特征雅各比,有效利用观测误差相关对红外高光谱资料进行同化。
[0115]
面向红外高光谱全天候观测误差协方差的应用需求,提出了基于云量的观测误差膨胀技术,建立观测误差方差随云量变化的函数对应关系,探索不同特征通道采用不同的云量膨胀数值和观测误差协方差特征值阈值截断膨胀方案,为实现不同误差水平的通道对代价函数产生不同程度的影响提供有效的、实用的途径。
[0116]
上述实施例为本发明的一种实施方式,但本发明的实施方式并不受所述实施例的限制,其他的任何背离本发明的精神实质与原理下所做的改变、修饰、代替、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1