阵列逆跟踪角度的调整方法、装置及存储介质与流程
本技术实施例涉及光伏发电,尤其涉及一种阵列逆跟踪角度的调整方法、装置及存储介质。
背景技术:
1、太阳能光伏发电因其清洁、安全和便利等优势得到了广泛应用。目前,光伏安装支架主要包括固定支架、平单轴跟踪支架、斜单轴跟踪支架以及双轴跟踪支架。其中,平单轴跟踪支架的结构简单实用,且发电增益明显,所以光伏安装支架多采用平单轴跟踪支架。
2、现有的,平单轴跟踪支架在早晚太阳高度角较低时的跟踪算法一般采用逆跟踪算法,常规逆跟踪算法主要应用于平单轴跟踪支架位于平地的场景,但工程实际中平单轴跟踪支架多部署于不平坦地势,如山地项目等,并且施工时存在安装误差,均会造成阵列间存在相对坡度。为解决由于相对坡度引起的阵列间产生的阴影遮挡,可以对平单轴跟踪支架的阵列间逆跟踪角度进行调整。
3、然而,由于相邻阵列支架的逆跟踪角度的密切相关性,基于现有的调整方式对平单轴跟踪支架的阵列间逆跟踪角度进行调整后,前后排阵列的逆跟踪角度差异较大,若根据差异较大的逆跟踪角度进行逆跟踪,将会影响到整个阵列的全局输出功率。
技术实现思路
1、本技术提供一种阵列逆跟踪角度的调整方法、装置及存储介质,通过对初始逆跟踪角度组进行调整可以得到离散程度较小的目标逆跟踪角度组,从而可以提高整个阵列的全局输出功率。
2、为达到上述目的,本技术采用如下技术方案:
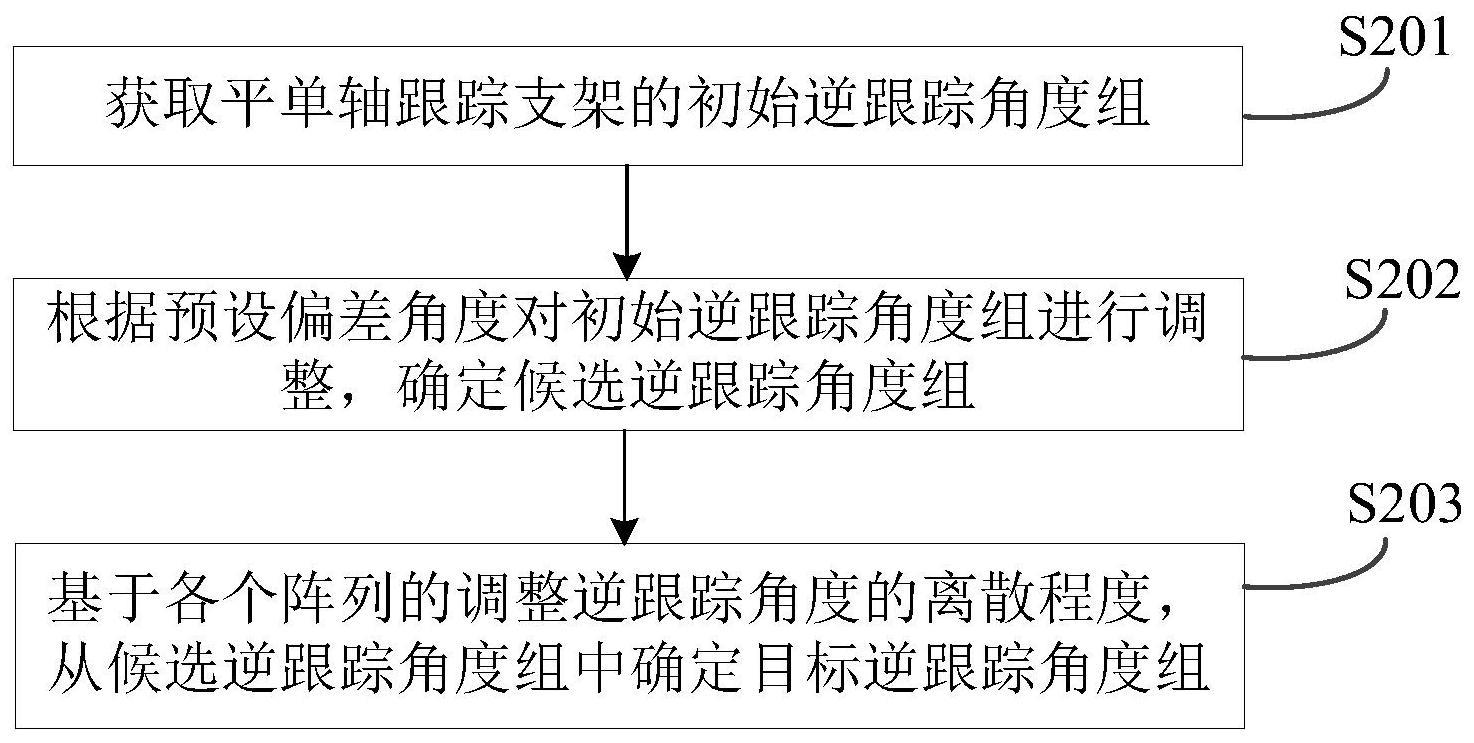
3、第一方面,本技术提供一种阵列逆跟踪角度的调整方法,包括:获取平单轴跟踪支架的初始逆跟踪角度组;初始逆跟踪角度组包括平单轴跟踪支架的各个阵列的初始逆跟踪角度;根据预设偏差角度对初始逆跟踪角度组进行调整,确定候选逆跟踪角度组;候选逆跟踪角度组中包括各个阵列的调整逆跟踪角度;基于各个阵列的调整逆跟踪角度的离散程度,从候选逆跟踪角度组中确定目标逆跟踪角度组;目标逆跟踪角度组中包括各个阵列的目标逆跟踪角度。
4、本技术提供的技术方案中,在获取到平单轴跟踪支架的初始逆跟踪角度组之后,可以根据预设偏差角度对初始逆跟踪角度组进行调整得到多个调整后的的逆跟踪角度组(即本技术中的候选逆跟踪角度组)。然后,可以根据各候选逆跟踪角度组中各个阵列的调整逆跟踪角度的离散程度,从各候选逆跟踪角度组中确定出目标逆跟踪角度组。这样,就可以根据各个阵列的调整逆跟踪角度的离散程度,确定出各个阵列的调整逆跟踪角度的离散程度较小的目标逆跟踪角度组。由于目标逆跟踪角度组中的各个阵列的调整逆跟踪角度的离散程度较小,所以,相比基于初始逆跟踪角度组进行逆追踪,基于本技术得到的目标逆跟踪角度组进行逆追踪,可以提高整个阵列的全局输出功率。
5、可选的,在一种可能的设计方式中,上述“获取平单轴跟踪支架的初始逆跟踪角度组”可以包括:获取平单轴跟踪支架的相对坡度参数组,并根据相对坡度参数组确定平单轴跟踪支架的初始逆跟踪角度组;相对坡度参数组包括平单轴跟踪支架的各个阵列的相对坡度参数,相对坡度参数用于表征相邻两个阵列的相对高度差;对应的,上述“根据预设偏差角度对初始逆跟踪角度组进行调整,确定候选逆跟踪角度组”可以包括:在确定相对坡度参数组中的相对坡度参数均小于或等于预设相对坡度参数的情况下,根据预设偏差角度对初始逆跟踪角度组进行调整,确定候选逆跟踪角度组。
6、可选的,在另一种可能的设计方式中,上述“根据预设偏差角度对初始逆跟踪角度组进行调整,确定候选逆跟踪角度组”可以包括:在初始逆跟踪角度组中首排阵列的初始逆跟踪角度上连续递增n次预设偏差角度,得到n个首排阵列的调整逆跟踪角度;并且,在初始逆跟踪角度组中首排阵列的初始逆跟踪角度上连续递减m次预设偏差角度,得到m个首排阵列的调整逆跟踪角度;n和m均为正整数;根据n个首排阵列的调整逆跟踪角度和相对坡度参数组,确定n个逆跟踪角度组;并且,根据m个首排阵列的调整逆跟踪角度和相对坡度参数组,确定m个逆跟踪角度组;之后将n个逆跟踪角度组、m个逆跟踪角度组以及初始逆跟踪角度组确定为候选逆跟踪角度组。
7、可选的,在另一种可能的设计方式中,上述“基于各个阵列的调整逆跟踪角度的离散程度,从候选逆跟踪角度组中确定目标逆跟踪角度组”,可以包括:确定候选逆跟踪角度组中各个阵列的调整逆跟踪角度的均值和标准差;根据均值和标准差,确定候选逆跟踪角度组中各个阵列的调整逆跟踪角度的离散率;基于离散率,从候选逆跟踪角度组中确定目标逆跟踪角度组。
8、可选的,在另一种可能的设计方式中,本技术提供的阵列逆跟踪角度的调整方法还可以包括:在确定相对坡度参数组中存在相对坡度参数大于预设相对坡度参数的情况下,根据各个阵列的相对坡度参数,对各个阵列进行阵列分组,并确定各个阵列分组对应的初始逆跟踪角度子分组;在各个阵列分组内,根据预设偏差角度对当前阵列分组对应的初始逆跟踪角度子分组进行调整,确定候选逆跟踪角度子分组;候选逆跟踪角度子分组中包括当前阵列分组内的阵列的调整逆跟踪角度;在各个阵列分组内,基于当前阵列分组内的阵列的调整逆跟踪角度,从候选逆跟踪角度子分组中确定目标逆跟踪角度子分组;目标逆跟踪角度子分组中包括当前阵列分组内的阵列的目标逆跟踪角度。
9、可选的,在另一种可能的设计方式中,上述“获取平单轴跟踪支架的相对坡度参数组”包括:调用阵列间相对坡度模型,根据当前时间信息,确定相对坡度参数组;阵列间相对坡度模型根据不同历史时间段的光线入射角度、阵列倾角、各个阵列之间的间距、各个阵列中组件的宽度以及组件的阴影参数得到。
10、可选的,在另一种可能的设计方式中,不同历史时间段可以包括:春季上午预设时段、春季下午预设时段、夏季上午预设时段、夏季下午预设时段、秋季上午预设时段、秋季下午预设时段、冬季上午预设时段以及冬季下午预设时段。
11、可选的,在另一种可能的设计方式中,上述“调用阵列间相对坡度模型”之前,还包括:根据当前阵列上被阴影遮挡的阴影总长度及阴影斜率确定阴影参数。
12、可选的,在另一种可能的设计方式中,上述“根据相对坡度参数组确定平单轴跟踪支架的初始逆跟踪角度组”可以包括:根据阵列倾角、各个阵列之间的间距、各个阵列中组件的宽度、当前时刻的光线入射角度和相对坡度参数组,确定初始逆跟踪角度组。
13、第二方面,本技术提供一种阵列逆跟踪角度的调整装置,包括:获取模块、调整模块以及确定模块;
14、获取模块,用于获取平单轴跟踪支架的初始逆跟踪角度组;初始逆跟踪角度组包括平单轴跟踪支架的各个阵列的初始逆跟踪角度;调整模块,用于根据预设偏差角度对初始逆跟踪角度组进行调整,确定候选逆跟踪角度组;候选逆跟踪角度组中包括各个阵列的调整逆跟踪角度;确定模块,用于基于各个阵列的调整逆跟踪角度的离散程度,从候选逆跟踪角度组中确定目标逆跟踪角度组;目标逆跟踪角度组中包括各个阵列的目标逆跟踪角度。
15、可选的,在一种可能的设计方式中,获取模块具体用于:获取平单轴跟踪支架的相对坡度参数组,并根据相对坡度参数组确定平单轴跟踪支架的初始逆跟踪角度组;相对坡度参数组包括平单轴跟踪支架的各个阵列的相对坡度参数,相对坡度参数用于表征相邻两个阵列的相对高度差;对应的,调整模块具体用于:在确定相对坡度参数组中的相对坡度参数均小于或等于预设相对坡度参数的情况下,根据预设偏差角度对初始逆跟踪角度组进行调整,确定候选逆跟踪角度组。
16、可选的,在另一种可能的设计方式中,调整模块具体还用于:在初始逆跟踪角度组中首排阵列的初始逆跟踪角度上连续递增n次预设偏差角度,得到n个首排阵列的调整逆跟踪角度;并且,在初始逆跟踪角度组中首排阵列的初始逆跟踪角度上连续递减m次预设偏差角度,得到m个首排阵列的调整逆跟踪角度;n和m均为正整数;根据n个首排阵列的调整逆跟踪角度和相对坡度参数组,确定n个逆跟踪角度组;并且,根据m个首排阵列的调整逆跟踪角度和相对坡度参数组,确定m个逆跟踪角度组;之后将n个逆跟踪角度组、m个逆跟踪角度组以及初始逆跟踪角度组确定为候选逆跟踪角度组。
17、可选的,在另一种可能的设计方式中,确定模块具体用于:确定候选逆跟踪角度组中各个阵列的调整逆跟踪角度的均值和标准差;根据均值和标准差,确定候选逆跟踪角度组中各个阵列的调整逆跟踪角度的离散率;基于离散率,从候选逆跟踪角度组中确定目标逆跟踪角度组。
18、可选的,在另一种可能的设计方式中,本技术提供的阵列逆跟踪角度的调整装置还可以包括:分组模块;
19、分组模块,用于在确定相对坡度参数组中存在相对坡度参数大于预设相对坡度参数的情况下,根据各个阵列的相对坡度参数,对各个阵列进行阵列分组,并确定各个阵列分组对应的初始逆跟踪角度子分组;调整模块,还用于在各个阵列分组内,根据预设偏差角度对当前阵列分组对应的初始逆跟踪角度子分组进行调整,确定候选逆跟踪角度子分组;候选逆跟踪角度子分组中包括当前阵列分组内的阵列的调整逆跟踪角度;确定模块,还用于在各个阵列分组内,基于当前阵列分组内的阵列的调整逆跟踪角度,从候选逆跟踪角度子分组中确定目标逆跟踪角度子分组;目标逆跟踪角度子分组中包括当前阵列分组内的阵列的目标逆跟踪角度。
20、可选的,在另一种可能的设计方式中,获取模块具体用于:调用阵列间相对坡度模型,根据当前时间信息,确定相对坡度参数组;阵列间相对坡度模型根据不同历史时间段的光线入射角度、阵列倾角、各个阵列之间的间距、各个阵列中组件的宽度以及组件的阴影参数得到。
21、可选的,在另一种可能的设计方式中,不同历史时间段可以包括:春季上午预设时段、春季下午预设时段、夏季上午预设时段、夏季下午预设时段、秋季上午预设时段、秋季下午预设时段、冬季上午预设时段以及冬季下午预设时段。
22、可选的,在另一种可能的设计方式中,确定模块,还用于根据当前阵列上被阴影遮挡的阴影总长度及阴影斜率确定阴影参数。
23、可选的,在另一种可能的设计方式中,获取模块具体还用于:根据阵列倾角、各个阵列之间的间距、各个阵列中组件的宽度、当前时刻的光线入射角度和相对坡度参数组,确定初始逆跟踪角度组。
24、第三方面,本技术提供一种阵列逆跟踪角度的调整装置,包括存储器、处理器、总线和通信接口;存储器用于存储计算机执行指令,处理器与存储器通过总线连接;当阵列逆跟踪角度的调整装置运行时,处理器执行存储器存储的计算机执行指令,以使阵列逆跟踪角度的调整装置执行如上述第一方面提供的阵列逆跟踪角度的调整方法。
25、可选的,该阵列逆跟踪角度的调整装置可以是用于实现阵列逆跟踪角度的调整的物理机,也可以是物理机中的一部分装置,例如可以是物理机中的芯片系统。该芯片系统用于支持阵列逆跟踪角度的调整装置实现第一方面中所涉及的功能,例如,接收,发送或处理上述阵列逆跟踪角度的调整方法中所涉及的数据和/或信息。该芯片系统包括芯片,也可以包括其他分立器件或电路结构。
26、第四方面,本技术提供一种计算机可读存储介质,计算机可读存储介质中存储有指令,当计算机执行指令时,使得计算机执行如第一方面提供的阵列逆跟踪角度的调整方法。
27、第五方面,本技术提供一种计算机程序产品,该计算机程序产品包括计算机指令,当计算机指令在计算机上运行时,使得计算机执行如第一方面提供的阵列逆跟踪角度的调整方法。
28、需要说明的是,上述计算机指令可以全部或者部分存储在计算机可读存储介质上。其中,计算机可读存储介质可以与阵列逆跟踪角度的调整装置的处理器封装在一起的,也可以与阵列逆跟踪角度的调整装置的处理器单独封装,本技术对此不做限定。
29、本技术中第二方面、第三方面、第四方面以及第五方面的描述,可以参考第一方面的详细描述;并且,第二方面、第三方面、第四方面以及第五方面的描述的有益效果,可以参考第一方面的有益效果分析,此处不再赘述。
30、在本技术中,上述阵列逆跟踪角度的调整装置的名字对设备或功能模块本身不构成限定,在实际实现中,这些设备或功能模块可以以其他名称出现。只要各个设备或功能模块的功能和本技术类似,属于本技术权利要求及其等同技术的范围之内。
31、本技术的这些方面或其他方面在以下的描述中会更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!