一种用于水上飞机着水数值仿真的规则波造波方法与流程
1.本发明属于结构物入水流固耦合数值仿真中液体波浪动力特性仿真计算技术领域,具体涉及一种用于水上飞机着水数值仿真的规则波造波方法。
背景技术:
2.水上飞机着水数值仿真分析,属于结构物入水流固耦合仿真分析的一种。在分析技术上,经历多年的发展,由开始的水上飞机静水着水数值仿真分析,发展到规则波着水数值仿真分析、不规则波着水数值仿真分析,模型建模越来越复杂,网格数量越来越大,以至于计算量急剧增加,数值仿真的实用性受到很大制约。
3.水上飞机规则波/不规则波着水数值仿真分析,目前的建模方法主要参考摇板造波、推板造波的理论方法,利用摇波板或推板的往返运动,推动液体的运动进而形成波浪,然后进行水上飞机着水数值仿真分析。该造波方法的缺点明显:造波耗时巨大;得到的波浪参数误差较大;造波计算过程中累计误差影响容易中断计算。
4.水上飞机着水性能的评估,主要参考水上飞机在规则波上的着水性能进行评估。因此,水上飞机规则波着水数值仿真分析,对促进水上飞机的发展起到重大作用。
技术实现要素:
5.本发明的目的是:提供了一种用于水上飞机着水数值仿真的规则波造波方法。本发明能够大幅提高水上飞机在规则波上的着水数值仿真计算效率和精度。
6.本发明的技术方案是:一种用于水上飞机着水数值仿真的规则波造波方法,包括下述步骤:
7.a.构建水上飞机静水着水数值仿真模型;
8.b.在所述的静水着水仿真模型上设计初始规则波波浪形态;
9.c.对已设计初始规则波波浪形态的静水着水仿真模型内的质点进行动能赋值,形成水上飞机规则波着水仿真模型。
10.前述的水上飞机着水数值仿真的规则波造波方法的步骤a中,水上飞机静水着水数值仿真模型的构建原则为:考虑飞机在波浪水面着水后的滑行距离,建立“固-液-气”耦合水上飞机静水着水数值仿真模型。
11.前述的水上飞机着水数值仿真的规则波造波方法的步骤a中,水上飞机静水着水数值仿真模型的构建方法为:
12.依据飞机总体气动外形,划分飞机结构有限元模型,不考虑水上飞机机体结构弹性特性,采用刚性体材料属性;
13.依据水上飞机重量特性,给飞机赋质量特性数据,定义“飞机-水体-空气”的耦合关系,定义流体边界条件;
14.定义水上飞机初始着水速度和输出项,采用ale法或euler法,完成水上飞机静水着水数值仿真计算模型的构建。
15.前述的水上飞机着水数值仿真的规则波造波方法中,所述的水上飞机静水着水数值仿真模型包括飞机结构模型、水流体模型和空气模型;所述的飞机结构模型的网格单元为拉格朗日单元;水流体模型和空气模型的网格单元均为ale单元或euler单元。
16.前述的水上飞机着水数值仿真的规则波造波方法的步骤b中,初始规则波波浪形态的设计方法为:
17.根据水上飞机静水着水数值仿真分析模型生成的仿真计算输入文件和规则波自由液面方程(1),使模型中网格单元的节点坐标发生移动,形成初始规则波波浪形态;
18.η(x,t)=a cos(kx-ωt)
ꢀꢀꢀ
(1)
19.式中,η为距离平衡面的位移;a表示微幅波振幅;k表示波数;ω为波动圆频率;t为时间;x为站位。
20.前述的水上飞机着水数值仿真的规则波造波方法的步骤c中,质点的动能赋值方法如下:
21.基于初始规则波波浪形态,得到的新的网格单元位置信息,结合式(2)和式(3),计算新的网格单元的节点速度值;
22.z为水深,g为重力加速度,λ为波长,则有:
23.k=2π/λ=ω2/g
ꢀꢀꢀ
(2)
24.u为水质点水平方向速度,v为水质点垂直方向速度,规则波的水质点速度为:
[0025][0026]
前述的水上飞机着水数值仿真的规则波造波方法的步骤a中,仿真模型构建时,通过优化建模参数,使飞机的静水着水仿真计算精度满足工程需求。
[0027]
前述的水上飞机着水数值仿真的规则波造波方法中,仿真模型构建时,优化建模参数的方法为:将模型中处于规则波波浪液面附近及水上飞机着水位置的网格单元的尺寸细化。
[0028]
本发明的优点是:本发明基于数值造波在水上飞机规则波着水数值仿真中的重要作用,设计了一种用于水上飞机规则波着水数值仿真计算中的规则波造波方法,该方法相对于常用的摇板造波、推板造波数值仿真方法,取得了如下有益效果:
[0029]
1)流体网格数量减少30%~50%,没有了摇板造波、推板造波模型的造波区和流场末端的削波区。
[0030]
2)计算效率得到大幅度的提高,本发明水上飞机规则波着水数值仿真计算时间主要花在数值造波上,水上飞机着水数值仿真计算只有1~3秒左右时间,而摇板造波、推板造波从开始造波到形成稳定的波浪需要1分钟多,计算时间减少约80%。
[0031]
3)计算精度大幅提高,利用本发明生成的规则波,波形和波内能直接对应理论模型,而摇板造波和推板造波理论基于微幅波假设,当遇到波高较大的规则波时,其造出来的波浪与实际存在一定误差,需要修正。
[0032]
4)减少大量的模型调试时间,即减少了摇板造波或推板造波模型调试时间,在常用的水上飞机规则波着水数值仿真计算中,模型调试时间可占到总计算时间的20%以上。
[0033]
综上所述,本发明能够大幅提高水上飞机在规则波上的着水数值仿真计算效率和精度。
附图说明
[0034]
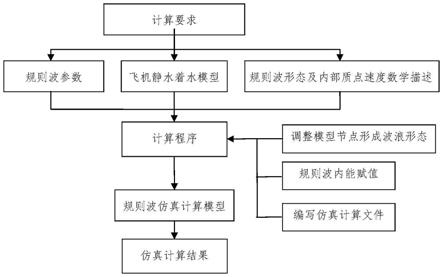
图1为规则波造波流程示意图,描述了水上飞机规则波着水数值仿真计算流程。
[0035]
图2为水上飞机静水着水数值仿真模型示意图,其中,1—空气网格,2—水面,3—着水区域网格加密,4—水上飞机。
[0036]
图3为程序计算处理后得到的局部放大规则波形状图。
[0037]
图4为程序计算处理后得到的水上飞机规则波着水数值仿真模型示意图。
具体实施方式
[0038]
下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
[0039]
实施例1。一种用于水上飞机着水数值仿真的规则波造波方法,如图1-4所示,具体步骤如下:
[0040]
步骤一、依据水上飞机总体外形、着水速度和所需计算的水上滑行距离,建立“固-液-气”耦合数值仿真模型,水上飞机网格单元为拉格朗日单元,水和空气流体网格单元为ale单元或euler单元,优化着水区域网格尺寸;
[0041]
步骤二、依据水上飞机重量特性,给水上飞机赋质量特性数据,定义“飞机-水体-空气”的耦合关系,定义流体边界条件;
[0042]
步骤三、定义水上飞机初始着水速度和输出项(主要为加速度、位移,耦合压力输出),采用ale法或euler法,建立水上飞机静水着水数值仿真计算模型;
[0043]
步骤四、水上飞机规则波水面着水参数分析,给出描述规则波的数学方程,包括自由液面方程、质点运动速度方程;
[0044]
步骤五、利用规则波液面方程和水上飞机静水着水数值仿真模型,编程计算并调整仿真模型节点位置,使形成初始规则波水面形态;
[0045]
步骤六、利用规则波质点运动方程步骤五得到的水上飞机着水数值仿真模型,编程计算并给水质点赋予初始速度,使水流体具有初始动能;
[0046]
步骤七、在步骤五和步骤六前提下,综合所有对水上飞机静水着水数值仿真模型的更改,得到水上飞机规则波着水数值仿真模型,省去了利用摇板或推板进行造波的仿真计算;
[0047]
步骤八、提交商用有限元软件计算,得到水上飞机规则波着水数值仿真计算结果。
[0048]
实施例2。一种用于水上飞机规则波着水数值仿真计算中的规则波造波方法,参见图1-4,结合水上飞机静水着水数值仿真建模方法特点和规则波数学描述方法,具体步骤如下:
[0049]
步骤一:根据需求建立水上飞机静水着水数值仿真模型
[0050]
考虑水上飞机在波浪水面着水后的滑行距离,建立“固-液-气”耦合水上飞机静水着水数值仿真模型,仿真模型包括水上飞机结构模型、水流体模型和空气模型。通过优化建模参数,使水上飞机在静水着水数值仿真计算精度满足工程需求。
[0051]
步骤二:水上飞机规则波着水数值仿真模型中初始规则波波浪形态计算
[0052]
根据水上飞机静水着水数值仿真分析模型生成的仿真计算输入文件,和规则波自由液面方程式(1),利用编写的程序,使流体模型中网格节点坐标发生移动,形成规则波浪的水面形态。
[0053]
规则波自由表面方程为
[0054]
η(x,t)=a cos(kx-ωt)
ꢀꢀꢀ
(1)
[0055]
式中,η为距离平衡面的位移,a表示微幅波振幅,k表示波数,ω为波动圆频率,t为时间,x为站位。
[0056]
步骤三:水上飞机着水数值仿真模型规则波内部质点动能赋值
[0057]
跟据步骤2得到的新的流体模型网格点位置信息和式(2)和式(3),利用编写的程序,计算波浪内部流体网格节点速度值,生成水体模型的初始速度。z为水深,g为重力加速度,λ为波长,则有:
[0058]
k=2π/λ=ω2/g
ꢀꢀꢀ
(2)
[0059]
u为水质点水平方向速度,v为水质点垂直方向速度,规则波的水质点速度为:
[0060][0061]
步骤四:生成水上飞机规则波着水数值仿真模型
[0062]
综合步骤三和步骤四对水上飞机静水着水数值仿真模型的修改,利用编写的程序生成水上飞机规则波着水数值仿真模型,该模型中水流体已具有初始规则波面形态和初始动能,模拟了规则波的初始运动特性。
[0063]
实施例3。一种用于水上飞机着水数值仿真的规则波造波方法,参见图1-图4,包括下述步骤:
[0064]
a.构建水上飞机静水着水数值仿真模型;
[0065]
b.在所述的静水着水仿真模型上设计初始规则波波浪形态;
[0066]
c.对已设计初始规则波波浪形态的静水着水仿真模型内的质点进行动能赋值,形成水上飞机规则波着水仿真模型。
[0067]
前述的步骤a中,水上飞机静水着水数值仿真模型的构建原则为:考虑飞机在波浪水面着水后的滑行距离,建立“固-液-气”耦合水上飞机静水着水数值仿真模型。
[0068]
前述的步骤a中,水上飞机静水着水数值仿真模型的构建方法为:
[0069]
依据飞机总体气动外形,划分飞机结构有限元模型,不考虑水上飞机机体结构弹性特性,采用刚性体材料属性;
[0070]
依据水上飞机重量特性,给飞机赋质量特性数据,定义“飞机-水体-空气”的耦合关系,定义流体边界条件;
[0071]
定义水上飞机初始着水速度和输出项(主要为加速度、位移,耦合压力输出),采用ale法或euler法,完成水上飞机静水着水数值仿真计算模型的构建。
[0072]
前述的水上飞机静水着水数值仿真模型包括飞机结构模型、水流体模型和空气模型;所述的飞机结构模型的网格单元为拉格朗日单元;水流体模型和空气模型的网格单元
均为ale单元或euler单元。
[0073]
前述的步骤b中,初始规则波波浪形态的设计方法为:
[0074]
根据水上飞机静水着水数值仿真分析模型生成的仿真计算输入文件和规则波自由液面方程(1),使模型中网格单元的节点坐标发生移动,形成初始规则波波浪形态;
[0075]
η(x,t)=a cos(kx-ωt)
ꢀꢀꢀ
(1)
[0076]
式中,η为距离平衡面的位移;a表示微幅波振幅;k表示波数;ω为波动圆频率;t为时间;x为站位。
[0077]
前述的步骤c中,质点的动能赋值方法如下:
[0078]
基于初始规则波波浪形态,得到的新的网格单元位置信息,结合式(2)和式(3),计算新的网格单元的节点速度值;
[0079]
z为水深,g为重力加速度,λ为波长,则有:
[0080]
k=2π/λ=ω2/g
ꢀꢀꢀ
(2)
[0081]
u为水质点水平方向速度,v为水质点垂直方向速度,规则波的水质点速度为:
[0082][0083]
前述的步骤a中,仿真模型构建时,通过优化建模参数,使飞机的静水着水仿真计算精度满足工程需求。
[0084]
仿真模型构建时,优化建模参数的方法为:将模型中处于规则波波浪液面附近及水上飞机着水位置的网格单元的尺寸细化。
[0085]
以上所述实施仅表达了本发明的实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1