一种桁架空中运输系统及其构建方法与流程
1.本发明涉及机器人技术领域,尤其涉及的是一种桁架空中运输系统及其构建方法。
背景技术:
2.近年来,无人机已经展示了其在空中运输的巨大潜能。相比于单个,多无人机系统能够运载更重的载荷,同时系统也变得更加复杂。目前,主流的多无人机协同运输方式有两种类型:绳系协同运输框架和刚性协同运输框架。但是对于尺寸小且重量大载荷,绳系协同运输框架因存在无用横向拉力,造成部分效率的损失;而无人机又无法直接与载荷固连构成刚性协同运输框架。
3.因此,现有技术还有待改进和发展。
技术实现要素:
4.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种桁架空中运输系统及其构建方法,旨在解决现有技术中对于尺寸小且重量大载荷,绳系协同运输框架因存在无用横向拉力,造成部分效率的损失;而无人机又无法直接与载荷固连构成刚性协同运输框架的问题。
5.本发明解决问题所采用的技术方案如下:
6.第一方面,本发明实施例提供一种桁架空中运输系统,其中,所述系统包括:若干无人机、设置在所述无人机上的球铰、若干系绳以及若干杆件;所述球铰与载荷通过所述系绳连接;所述无人机之间通过所述杆件连接;所述无人机、所述杆件、所述系绳和载荷构成桁架刚性结构。
7.在一种实现方式中,所述杆件为轻质杆件。
8.第二方面,本发明实施例还提供一种桁架空中运输系统的构建方法,其中,所述方法包括:
9.获取载荷重力,并根据所述载荷重力确定无人机总数;
10.基于无人机总数,根据若干系绳、若干杆件和载荷,构建桁架刚性结构图;
11.基于所述桁架刚性结构图,计算每根杆件的应力,并根据每根杆件的应力确定每根杆件的屈服强度,其中,所述屈服强度为桁架刚性结构图中每根杆件的强度指标。
12.在一种实现方式中,所述根据所述载荷重力确定无人机总数包括:
13.获取每个所述无人机的重力和所述无人机的最大推力;
14.根据每个所述无人机的重力、所述载荷重力和所述最大推力,确定无人机总数。
15.在一种实现方式中,所述根据每个所述无人机的重力、所述载荷重力和所述最大推力,确定无人机总数包括:
16.将所述最大推力乘以预设系数,得到中间推力;
17.将所述中间推力将减去每个所述无人机的重力,得到中间合力;
18.根据所述中间合力和所述载荷重力,确定无人机总数。
19.在一种实现方式中,所述根据所述中间合力和所述载荷重力,确定无人机总数包括:
20.将所述载荷重力除以所述中间合力,得到商值;
21.根据所述商值,确定无人机总数。
22.在一种实现方式中,所述根据所述商值,确定无人机总数包括:
23.将所述商值进行向上取整,得到整数值,并将所述整数值作为无人机总数。
24.在一种实现方式中,所述基于无人机总数,根据若干系绳、若干杆件和载荷,构建桁架刚性结构图包括:
25.根据载荷、系绳和杆件,确定初始节点和初始边;
26.添加一个无人机作为新增节点;
27.统计初始节点中的无人机的数量和新增节点中的无人机的数量,得到无人机使用数量;
28.根据添加的无人机、载荷、系绳和杆件,得到新增边;
29.当所述无人机使用数量小于所述无人机总数时,继续执行添加一个无人机作为新增节点的步骤;
30.当所述无人机使用数量等于所述无人机总数时,则停止执行添加一个无人机作为新增节点的步骤,并将所述初始节点、初始边、所有新增节点和所有新增边生成桁架刚性结构图。
31.在一种实现方式中,所述初始边包括第一初始边和第二初始边;所述根据载荷、系绳和杆件,确定初始节点和初始边包括:
32.将两个无人机和载荷组成三个初始节点;
33.将两个无人机之间的杆件作为第一初始边;
34.将两个无人机和载荷之间的系绳作为第二初始边。
35.在一种实现方式中,所述根据添加的无人机、载荷、系绳和杆件,得到新增边包括:
36.将添加的无人机与载荷之间的系绳作为第一新增边;
37.将添加的无人机与相邻无人机之间的杆件作为第二新增边。
38.在一种实现方式中,所述基于所述桁架刚性结构图,计算每根杆件的应力包括:
39.获取用户基于所述桁架刚性结构图定义的连接矩阵和邻接矩阵;
40.根据所述邻接矩阵,得到与所述无人机对应的配置质量;其中,所述配置质量为无人机被分配的杆件质量;
41.获取一个无人机的质量;
42.将一个无人机的质量和与所述无人机对应的配置质量相加,得到节点质量;
43.获取一个无人机在平衡状态下的推力;
44.根据所述节点质量得到节点重力,并将所述节点重力和所述推力在坐标轴上进行分解,分别得到x轴外力分量、y轴外力分量和z轴外力分量;
45.将所述x轴外力分量、所述y轴外力分量和所述z轴外力分量组成外力向量;
46.获取节点坐标值,并对所述连接矩阵和所述节点坐标值进行混合运算,得到中间矩阵;
47.将所述中间矩阵求逆后与所述外力向量进行相乘,得到力密度向量;
48.根据所述力密度向量,得到每根杆件的应力。
49.在一种实现方式中,所述根据所述邻接矩阵,得到与所述无人机对应的配置质量包括:
50.获取与所述无人机连接的若干杆件的质量;
51.基于所述邻接矩阵,对与所述无人机连接的若干杆件的质量进行分配运算,得到与所述无人机对应的配置质量。
52.在一种实现方式中,所述根据所述力密度向量,得到每根杆件的应力包括:
53.获取所述力密度向量中每个力密度对应的杆件边长;
54.将每个力密度与所述力密度对应的杆件边长进行相乘,得到每根杆件的应力。
55.在一种实现方式中,所述根据所述应力确定所述杆件的屈服强度包括:
56.所述根据每根杆件的应力确定每根杆件的屈服强度包括:
57.获取每根杆件的应力对应的杆件横截面积;
58.获取安全系数;其中,所述安全系数用于表征杆件的安全性;
59.将每根杆件的应力乘以所述安全系数得到的乘积除以每根杆件的应力对应的杆件横截面积,得到若干强度值;
60.从所述若干强度值中选取满足预设条件的值作为屈服强度。
61.第三方面,本发明实施例还提供一种智能终端,包括有存储器,以及一个或者一个以上的程序,其中一个或者一个以上程序存储于存储器中,且经配置以由一个或者一个以上处理器执行所述一个或者一个以上程序包含用于执行如上述任意一项所述的桁架空中运输系统的构建方法。
62.第四方面,本发明实施例还提供一种非临时性计算机可读存储介质,当所述存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行如上述中任意一项所述的桁架空中运输系统的构建方法。
63.本发明的有益效果:本发明实施例系统包括:若干无人机;至少一个球铰,所述球铰设置在所述无人机上;至少一个系绳,所述系绳与所述球铰连接,且用于将所述球铰与载荷连接;至少一根杆件,所述杆件设置在无人机与无人机之间,且所述杆件的两端分别与所述无人机连接;所述无人机、所述杆件、所述系绳和所述载荷构成桁架刚性结构。可见,本发明实施例中无人机之间通过杆件连接,无人机与载荷之间通过系绳连接,使得所述无人机、所述杆件、所述系绳和载荷构成桁架刚性结构,提升了对尺寸小且重量大载荷的运输效率。
附图说明
64.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
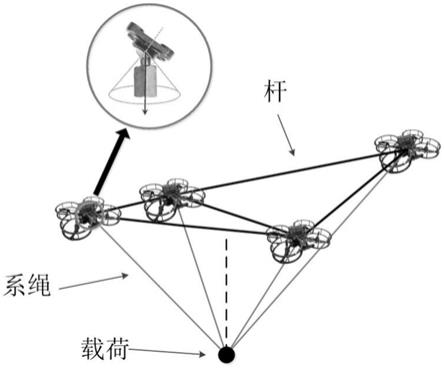
65.图1为本发明实施例提供的桁架空中运输系统结构图。
66.图2为本发明实施例提供的桁架空中运输系统的构建方法流程示意图。
67.图3为本发明实施例提供的智能终端的内部结构原理框图。
具体实施方式
68.本发明公开了一种桁架空中运输系统及其构建方法,为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
69.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或无线耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
70.本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样被特定定义,否则不会用理想化或过于正式的含义来解释。
71.由于现有技术中,在绳系协同运输框架中,无人机与载荷通过绳缆连接,可以通过编队(k.klausen,c.meissen,t.i.fossen,m.arcak and t.a.johansen,“cooperative control for multirotors transporting an unknown suspended load under environmental disturbances,”ieee trans.control syst.technol.,vol.28,no.2,pp.653-660,mar.2020.)和逆运动学(q.jiang and v.kumar,“the inverse kinematics of cooperative transport with multiple aerial robots,”ieee trans.robot.,vol.29,no.1,pp.136-145,feb.2013.)的方法对系统进行控制,控制技术已经较为成熟。然而,从结构上看,如果载荷尺寸较小,那么这些绳缆将总是斜拉的,也就是说,只有一部分的绳上拉力用于平衡载荷的重力,而另一部分则用于维持斜拉的队形,这里称其为“无用横向拉力”,显然,由于这些无用横向拉力的存在,无人机无法将全部的升力输出用于抵消重力,这也就意味着部分效率的损失。
72.然而,在刚性协同运输框架中,无人机会与载荷直接固连或用球铰连接,因此不会存在斜拉的问题,无用横下拉力也就不存在。国内外已经有不少文献研究了其控制问题,如文献(y.h.tan,s.lai,k.wang,and b.m.chen,“cooperative control of multiple unmanned aerial systems for heavy duty carrying,”annu.rev.control,vol.46,pp.44-57,apr.2018.)(a.tagliabue,m.kamel,r.siegwart,and j.nieto,”robust collaborative object transportation using multiple mavs,”int.j.robot.res.,vol.38,no.9,pp.1020-1044,aug.2019.)。不过,对于尺寸较小的载荷,将没有足够的空间使无人机安置到载荷上,刚性框架会不适用于尺寸较小且重量较大的载荷。
73.为了解决现有技术的问题,本实施例提供了一种桁架空中运输系统,系统中无人机之间通过杆件连接,无人机与载荷之间通过系绳连接,使得所述无人机、所述杆件、所述系绳和载荷构成桁架刚性结构,提升了对尺寸小且重量大载荷的运输效率。具体实施例中的系统包括:若干无人机;至少一个球铰,所述球铰设置在所述无人机上;至少一个系绳,所
述系绳与所述球铰连接,且用于将所述球铰与载荷连接;至少一根杆件,所述杆件设置在无人机与无人机之间,且所述杆件的两端分别与所述无人机连接;所述无人机、所述杆件、所述系绳和所述载荷构成桁架刚性结构。
74.如图1中所示,本发明实施例提供一种桁架空中运输系统,该系统包括:若干无人机;至少一个球铰,所述球铰设置在所述无人机上;至少一个系绳,所述系绳与所述球铰连接,且用于将所述球铰与载荷连接;至少一根杆件,所述杆件设置在无人机与无人机之间,且所述杆件的两端分别与所述无人机连接;所述无人机、所述杆件、所述系绳和所述载荷构成桁架刚性结构。
75.实际中运输尺寸小且重量大的载荷时,由于现有的传统绳系协同运输框架存在无用横向拉力,造成大重量载荷的运输效率低下,而无人机又无法与尺寸小且重量大的载荷固连成刚性协同运输框架。桁架是在现代建筑工程中的一种重要结构,其由销接头连接的杆元素组成一个刚性图。在桁架中,不存在剪力,所有应力都沿着杆件的轴向,这使得桁架可以用少量材料制造出轻质、坚固的机械结构,此外,桁架节点上的外力将分配到拉伸网络中,从而降低单个杆件的机械强度。由于这些结构上的优点,桁架已经被应用于机器人技术中,如张拉整体机器人(m.vespignani,j.m.friesen,v.sunspiral,and j.bruce,“design of superball v2,acompliant tensegrity robot for absorbing large impacts,”in proc.ieee/rsj int.conf.intell.robots syst.,oct.2018,pp.2865-2871.),关节设计(j.m.friesen,j.l.dean,t.bewley,and v.sunspiral,“a tensegrity-inspired compliant 3-dof compliant joint,”in proc.int.conf.robot.autom.,may 2018,pp.3301-3306.)。故本发明采用桁架结构构建桁架空中运输系统,系统在传统的绳系协同运输框架的基础上进行改进,考虑到绳系协同运输框架存在横向拉力,故在无人机之间增加杆件。在一种实现方式中,所述杆件为轻质杆件。在本实施例中,无人机为旋翼无人机,系绳与设置在无人机上的球铰连接,以使得无人机和载荷通过系绳连接;其中所述球铰包括底座、盖体和球杆,其中,所述球杆的底端设置旋转球。通过上述设置,在时间运算时,无人机与杆件、系绳以及载荷构成桁架刚性结构,可以消除无用横向拉力,使得对尺寸小且重量大的载荷的运输效率大大提高。
76.示例性方法
77.本实施例提供桁架空中运输系统的构建方法,该方法可以应用于机器人的智能终端。具体如图1所示,所述方法包括:
78.步骤s100、获取载荷重力,并根据所述载荷重力确定无人机总数;
79.具体地,先获取载荷质量为m
l
,根据质量与重力的关系,就可以得到载荷的重力g
l
,载荷的重力越大,需要的无人机的个数越多。实际中使用多少个无人机才合理(合理条件为:不浪费无人机资源,又能满足实际运输的要求),是根据载荷重力来确定的。
80.为了得到无人机总数,所述根据所述载荷重力确定无人机总数包括如下步骤:
81.s101、获取每个所述无人机的重力和所述无人机的最大推力;
82.s102、根据每个所述无人机的重力、所述载荷重力和所述最大推力,确定无人机总数。
83.每个无人机本身也是有重力的,并且假设所有无人机的重力是相等的,因此只需获取一个无人机的重力gu。此外,无人机在飞行过程中还有推力,为了精准计算无人机总
数,需要获取无人机的最大推力f
max
。再根据每个所述无人机的重力gu、所述载荷重力g
l
和所述最大推力f
max
,确定无人机总数。相应的,所述根据每个所述无人机的重力、所述载荷重力和所述最大推力,确定无人机总数包括如下步骤:将所述最大推力乘以预设系数,得到中间推力;将所述中间推力将减去每个所述无人机的重力,得到中间合力;根据所述中间合力和所述载荷重力,确定无人机总数。
84.实际中,为了给杆件重量的预留裕度和给运输系统预留机动性的裕量,将所述最大推力乘以预设系数,得到中间推力,其中,由于桁架结构的高抗拒轴向力特性,杆件重量可以是轻质的,相比于无人机和载荷的重量,其占比很小,但是也要为杆件重量预留余度;给运输系统预留机动性的裕量是为了让系统能向上爬升高度,从而实现运输功能。在本实施例中,预设系数为0.7。故中间推力为0.7*f
max
,将所述中间推力将减去每个所述无人机的重力,得到中间合力,如中间合力为f
合
=0.7*f
max-gu,将所述载荷重力g
l
除以所述中间合力f
合
,得到商值h,商值h可能是整数,也可能是小数,而无人机的总数是整数,故将所述商值h进行向上取整,得到整数值,并将所述整数值作为无人机总数。如商值h为5,则无人机总数为5;如商值h为5.3,则无人机总数为6。
85.得到无人机总数后,就可以执行如图2所示的如下步骤:s200、基于无人机总数,根据若干系绳、若干杆件和载荷,构建桁架刚性结构图;
86.由于系统是由无人机、若干系绳、若干杆件和载荷构成,无人机数目确定后,系绳个数确定下来,然后杆件个数以及长度,就可以构建由无人机和载荷形成的节点,由系绳和杆件形成的边的桁架刚性结构图。实际中,杆件虽然可以制作的轻质,但也会占用部分载荷能力,因此添加的杆件应当尽可能的少;此外,杆件长度就是无人机飞行间距,这与实际系统尺寸配置有关。本发明的构建方法适用于任何杆件长度,适用于1m杆件也适用于10m杆件。
87.为了得到构建桁架刚性结构图,所述基于无人机总数,根据若干系绳、若干杆件和载荷,构建桁架刚性结构图包括如下步骤:
88.s201、根据载荷、系绳和杆件,确定初始节点和初始边;
89.s202、添加一个无人机作为新增节点;
90.s203、统计初始节点中的无人机的数量和新增节点中的无人机的数量,得到无人机使用数量;
91.s204、根据添加的无人机、载荷、系绳和杆件,得到新增边;
92.s205、当所述无人机使用数量小于所述无人机总数时,继续执行添加一个无人机作为新增节点的步骤;
93.s206、当所述无人机使用数量等于所述无人机总数时,则停止执行添加一个无人机作为新增节点的步骤,并将所述初始节点、初始边、所有新增节点和所有新增边生成桁架刚性结构图。
94.具体地,初始边包括第一初始边和第二初始边,先选择两个无人机,将两个无人机和载荷组成三个初始节点,无人机和载荷构成节点集v,系绳和杆件构成边集e,一个最小刚性图就需要被构建。其中n+1个节点已包含载荷和n架无人机经被确定,n根系绳所对应的边也已经被确定,还需要确定的是有添加杆件构成的边。为了构建刚性结构,两个无人机之间添加一根杆件,该杆件作为第一初始边,每个无人机与载荷之间的系绳作为第二初始边,第
二初始边有两个,使两个无人机和载荷这三个节点构成一个刚性子图。整个系统的桁架刚性结构图从这三个节点组成的子图开始。然后在上述子图的基础上,添加一个无人机作为新增节点;统计初始节点中的无人机的数量和新增节点中的无人机的数量,得到无人机使用数量;添加的无人机和载荷之间的系绳就被确定,将添加的无人机与载荷之间的系绳作为第一新增边;还需要添加两根额外的杆件作为边连接到刚性子图中还没有和该无人机连接的无人机节点,将添加的无人机与相邻无人机之间的杆件作为第二新增边,也即第二新增边有两个,使新生成的子图保持刚性。此过程一直持续,直到所有无人机都被添加进刚性子图,具体为:当所述无人机使用数量小于所述无人机总数时,继续执行添加一个无人机作为新增节点的步骤;当所述无人机使用数量等于所述无人机总数时,则停止执行添加一个无人机作为新增节点的步骤,并将所述初始节点、初始边、所有新增节点和所有新增边生成桁架刚性结构图。
95.桁架刚性结构图构建好以后,就可以执行如图2所示的如下步骤:s300、基于所述桁架刚性结构图,计算每根杆件的应力,并根据每根杆件的应力确定每根杆件的屈服强度,其中,所述屈服强度为桁架刚性结构图中每根杆件的强度指标。
96.具体地,屈服强度为桁架刚性结构图中每根杆件的强度的一个重要指标,用于表征所述杆件是否容易断裂或者是否变形,一旦杆件断裂或者变形,势必影响桁架空中运输系统的正常使用。桁架刚性结构图构建好以后,需要选择合适的杆件,以使得杆件的强度能满足实际运输的需要,故要求解出每个杆件的应力,得到每根杆件的应力后,再根据应力与屈服强度的关系,得到每根杆件的屈服强度。
97.为了得到应力,所述基于所述桁架刚性结构图,计算每根杆件的应力包括如下步骤:获取用户基于所述桁架刚性结构图定义的连接矩阵和邻接矩阵;根据所述邻接矩阵,得到与所述无人机对应的配置质量;其中,所述配置质量为无人机被分配的杆件质量;获取一个无人机的质量;将一个无人机的质量和与所述无人机对应的配置质量相加,得到节点质量;获取一个无人机在平衡状态下的推力;根据所述节点质量得到节点重力,并将所述节点重力和所述推力在坐标轴上进行分解,分别得到x轴外力分量、y轴外力分量和z轴外力分量;将所述x轴外力分量、所述y轴外力分量和所述z轴外力分量组成外力向量;获取节点坐标值,并对所述连接矩阵和所述节点坐标值进行混合运算,得到中间矩阵;将所述中间矩阵求逆后与所述外力向量进行相乘,得到力密度向量;根据所述力密度向量,得到每根杆件的应力。
98.具体地,用户可以为工程师也可以为其他设计人员,用户首先定义连接矩阵:其中,v是点集,e是边集,加上绝对值表面了c矩阵的大小,说明c是一个|e|*|v|大小的实矩阵。前|v|-1成员表示系绳,后面其他行成员表示杆,如果成员k(由于矩阵c有|e|行,因此,k取值为1到|e|)连接了节点i和j(i《j),那么第k行的第i个和第j个元素将被赋值为1和-1,即连接矩阵:
99.100.接着定义邻接矩阵,即:
[0101][0102][0103]
其中,(vi,vj)表示从节点j到节点i的边。
[0104]
得到连接矩阵和邻接矩阵后,就可以根据所述邻接矩阵,得到与所述无人机对应的配置质量;其中,所述配置质量为无人机被分配的杆件质量;相应的,所述根据所述邻接矩阵,得到与所述无人机对应的配置质量包括如下步骤:获取所述无人机连接的若干杆件的质量m
ij
;基于所述邻接矩阵,对与所述无人机连接的若干杆件的质量进行分配运算,得到与所述无人机对应的配置质量。如:桁架空中运输系统中,系绳的质量可以忽略不计,杆的质量可以被均匀分配到其连接的两个相邻节点上,故配置质量为:
[0105][0106]
其中,其中m
ij
为连接无人机i和j的杆的质量。接着获取一个无人机的质量mu,并将一个无人机的质量mu和与所述无人机对应的配置质量相加,得到节点质量mi;节点质量为:
[0107][0108]
得到节点质量后,获取一个无人机在平衡状态下的推力;例如:fi表示平衡状态下第i架无人机的推力,根据所述节点质量得到节点重力mig,并将所述节点重力mig和所述推力fi在坐标轴上进行分解,分别得到x轴外力分量f
x
、y轴外力分量fy和z轴外力分量fz;对于载荷节点,只有m
l
g。由于对合力在坐标轴上进行分解是现有技术,在此不再赘述。例如:在惯性坐标系下,f
x
,fy和fz表示节点沿三个轴的外力力分量。将所述x轴外力分量、所述y轴外力分量和所述z轴外力分量组成外力向量;例如:
[0109][0110]
此外,利用整体法,分析每个无人机受力,解以下优化方程:
[0111]
min f
tf[0112]
和约束方程
[0113][0114][0115]
其中i3表示一个3*3的对角单位矩阵,cos2δ表示cosδ的平方,是一个数,cos2δi3为cos2δ乘一个矩阵i3;δ表示球铰的最大活动角,n=[001]
t
表示球铰中心轴线的朝向。
[0116]
获取节点坐标值,并对所述连接矩阵和所述节点坐标值进行混合运算,得到中间
矩阵;例如:在惯性坐标系下,定义x,y,为节点在各个轴上的坐标值,中间矩阵为
[0117][0118]
此外,在桁架力网络中,有如下平衡关系:
[0119]ct
diag(q)cx=f
x
[0120]ct
diag(q)cy=fy[0121]ct
diag(q)cz=fz[0122]
其中
[0123][0124]
求解上力平衡方程,利用性质diag(a)b=diag(b)a,其中a和b为两个同维度大小向量,原平衡方程可以写为:
[0125]
hq=f
[0126]
接着将所述中间矩阵求逆(在本实施例中为伪逆)后与所述外力向量进行相乘,得到力密度向量;那么就可以得到力密度向量q:
[0127]
q=h
+f[0128]
其中(
·
)
+
表示矩阵的伪逆。最后根据所述力密度向量,得到每根杆件的应力。相应的,所述根据所述力密度向量,得到每根杆件的应力包括如步骤:获取所述力密度向量q中每个力密度qk对应的杆件边长lk;实际中,首先根据无人机的性能确定无人机的安全飞行距离,然后根据安全飞行距离确定无人机之间的飞行间距,这就是杆件长度lk。将每个力密度qk与所述力密度对应的杆件边长lk进行相乘,得到每根杆件的应力tk。得到每根杆件的应力tk后,可以根据每根杆件的应力确定每根杆件的屈服强度,在一种实现方式中,所述根据每根杆件的应力确定每根杆件的屈服强度包括如下步骤:获取每根杆件的应力对应的杆件横截面积sk(sk表示第k根杆的横截面积);获取安全系数χ;其中,所述安全系数用于表征杆件的安全性;将每根杆件的应力tk乘以所述安全系数χ得到的乘积tk*χ除以每根杆件的应力对应的杆件横截面积sk,得到若干强度值0<χ<1为安全系数(可以取0.8),;从所述若干强度值pk中选取满足预设条件的值作为屈服强度σ。计算过程如下:
[0129]
对于添加的杆件,其屈服强度σ需要满足的预设条件为:
[0130]
σ>max{pk}
[0131]
基于上述实施例,本发明还提供了一种智能终端,其原理框图可以如图3所示。该智能终端包括通过系统总线连接的处理器、存储器、网络接口、显示屏、温度传感器。其中,该智能终端的处理器用于提供计算和控制能力。该智能终端的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统和计算机程序。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该智能终端的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种桁架空中运输系统的
构建方法。该智能终端的显示屏可以是液晶显示屏或者电子墨水显示屏,该智能终端的温度传感器是预先在智能终端内部设置,用于检测内部设备的运行温度。
[0132]
本领域技术人员可以理解,图3中的原理图,仅仅是与本发明方案相关的部分结构的框图,并不构成对本发明方案所应用于其上的智能终端的限定,具体的智能终端可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
[0133]
在一个实施例中,提供了一种智能终端,包括有存储器,以及一个或者一个以上的程序,其中一个或者一个以上程序存储于存储器中,且经配置以由一个或者一个以上处理器执行所述一个或者一个以上程序包含用于进行以下操作的指令:获取载荷重力,并根据所述载荷重力确定无人机总数;
[0134]
基于无人机总数,根据若干系绳、若干杆件和载荷,构建桁架刚性结构图;
[0135]
基于所述桁架刚性结构图,计算每根杆件的应力,并根据每根杆件的应力确定每根杆件的屈服强度,其中,所述屈服强度为桁架刚性结构图中每根杆件的强度指标。
[0136]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本发明所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0137]
综上所述,本发明公开了一种桁架空中运输系统及其构建方法,所述系统包括:若干无人机;至少一个球铰,所述球铰设置在所述无人机上;至少一个系绳,所述系绳与所述球铰连接,且用于将所述球铰与载荷连接;至少一根杆件,所述杆件设置在无人机与无人机之间,且所述杆件的两端分别与所述无人机连接;所述无人机、所述杆件、所述系绳和所述载荷构成桁架刚性结构。本发明中无人机之间通过杆件连接,无人机与载荷之间通过系绳连接,使得所述无人机、所述杆件、所述系绳和载荷构成桁架刚性结构,提升了对尺寸小且重量大载荷的运输效率。
[0138]
基于上述实施例,本发明公开了一种桁架空中运输系统的构建方法,应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1