一种多视角倾斜影像双点定位方法
1.本发明涉及一种物方点定位方法,特别是涉及一种多视角倾斜影像双点定位方法。
背景技术:
2.在测图领域,广泛涉及解求地面点的物方坐标。物方坐标的确定对于自然资源管理与监测、道路监测和地形图更新等方面起着重要作用。现有的解求物方点坐标的方法有双片前方交会法和多片前方交会法。
3.双片前方交会法利用两张像片前方交会并采用平差方法解求物方点坐标,但获得的地物点坐标精度仍然不是很高,主要原因是双片前方交会中影像质量不高导致像点坐标存在误差,同时交会角大小也会影响物方坐标精度。
4.多片前方交会法,即多基线摄影测量前方交会法,一般可分为光束法前方交会法和线性前方交会法。线性前方交会法的方程为线性方程,无须线性化,也不需要提供初值,求解速度较快,但其求解得到的物方点精度不高。光束法前方交会法以双片前方交会得到的物方点坐标作为初值,以共线方程作为基础方程并对其进行线性化,利用最小二乘迭代求解最终得到高精度的物方测量坐标,但定位精度严重依赖外方位元素的准确度,无控制条件下该方法精度难以得到保障。
技术实现要素:
5.本发明所要解决的技术问题在于提供一种多视角倾斜影像双点定位方法。通过该方法,可以在无惯性传感器(inertial measurement unit,imu)角度和无控制条件下求解物方点坐标,以得到高精度的物方点坐标。
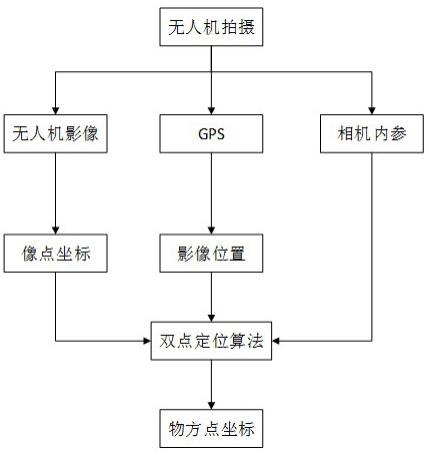
6.为了达到上述目的,本发明涉及一种多视角倾斜影像双点定位方法。主要包括以下几个步骤:1)利用无人机获取至少6张能够同时观测到两个物方点的影像;2)通过无人机的gps得到影像位置;3)获得两物方点在无人机影像中的像点坐标;4)将影像位置、像点坐标和相机内参代入双点定位算法得到物方点坐标。
7.本发明提出了多视角倾斜影像双点定位的新方法,避免了imu角度对定位精度的严重影响以及无控制条件下影像空中三角测量得到的外方位元素不精确对定位精度的影响,有效提高了物方点定位精度。
8.具体地,本发明方法包括如下步骤:
9.(1)利用无人机获取至少6张能够同时观测到两个物方点的影像;
10.(2)通过无人机的gps得到影像位置;
11.(3)获得两物方点在无人机影像中的像点坐标;
12.(4)将影像位置、像点坐标和相机内参代入双点定位算法得到物方点坐标。
13.本发明中无人机获取的影像应同时观测到两个物方点且影像数量应不少于6张。
14.本发明将无人机获取影像时记录的影像位置、影像中物方点对应像点坐标和相机
内参代入双点定位算法得到物方点坐标,双点定位算法使用到的计算公式为:
[0015][0016]
式中o是影像的摄影中心,a和b为物方点在图像上的投影点,∠aob为观测角度。
[0017][0018]
式中o是影像的摄影中心,a和b为影像观测到的物方两点,∠aob为观测角度。
[0019]
观测角度∠aob先通过像点坐标和影像位置使用公式(1)得到;代入公式(2)中,物方点a和b是未知的,一共有6个未知数,通过至少6张观测影像联合求解物方a、b两点的坐标。
[0020]
本发明提出的公式中观测角度可以通过像点坐标和影像位置得到,物方点a和b是未知的,一共有6个未知数,通过至少6张观测影像联合求解得到物方a、b两点的坐标。本发明方法imu角度不参与计算,避免了imu角度对定位精度的严重影响;无需空中三角测量解算外方位元素,避免了无控制条件下影像空中三角测量得到的外方位元素不精确对定位精度的影响;可以更简单高效得到物方点坐标,同时适用于更多情况。
附图说明
[0021]
图1为多视角倾斜影像双点定位流程图;
[0022]
图2为双点定位原理示意图。
具体实施方式:
[0023]
本实施例是仿真实验下基于双点定位算法的多视角倾斜影像双点定位方法。
[0024]
所述仿真实验是指以地面点坐标(0,0,0)作为中心点,设置无人机高100米、距中心点半径100米绕中心点环绕拍摄。设定目标地面点坐标为点1(37.8937381963,0,0)和点2(-37.8937381963,0,0)。无人机成像大小为4000
×
4000,焦距为3464.10162,像主点偏移量为2000,这里的单位为像素。无人机的倾角与摄影角度相同,以45度作为标准仿真实验,通过仿真得到一组无人机影像数据,这里无人机影像的数量设为8张。无人机的姿态和位置已知,构建投影矩阵p可以得到地面点与像点之间的对应关系,获取地面点对应的像点坐标,8张像片的影像位置、地面点对应像点坐标和相机内参已知。
[0025]
本实施例的具体实施过程是:
[0026]
步骤1,获取无人机影像、相机内参和影像位置
[0027]
使用无人机对两个物方点环绕拍摄,设置无人机高100米、距中心点半径100米,无人机的倾角为45度,得到8张包含两物方点的影像。无人机自带gps可以得到影像位置,无人机成像大小为4000
×
4000,相机内参通过查阅无人机参数得到焦距为3464.10162,像主点偏移量为2000,这里的单位为像素。影像位置如表1所示:
[0028]
表1:影像位置
[0029] 像片1像片2像片3像片4像片5像片6像片7像片8x0.00000070.710678100.00000070.7106780.000000-70.710678-100.000000-70.710678
y-100.000000-70.7106780.00000070.710678100.00000070.7106780.000000-70.710678z100.000000100.000000100.000000100.000000100.000000100.000000100.000000100.000000
[0030]
步骤2,获取像点坐标
[0031]
在影像中可以采用人工选择的方法确定两物方点所对应的像点坐标,两物方点对应像点坐标如表2所示。
[0032]
表2:像点坐标
[0033] 像片1像片2像片3像片4像片5像片6像片7像片8x12928.2027982757.8744272000.0000011242.1255751071.7972021421.2053022000.0000012578.794699y11999.9999972535.8981432809.7632782535.89814620001590.7303551448.2086821590.730357x21071.7972021421.2053011999.9999992578.7946982928.2027982757.8744251999.9999991242.125573y21999.9999971590.7303571448.2086821590.7303551999.9999942535.8981462809.7632782535.898143
[0034]
步骤3,双点定位算法物方点定位
[0035]
3.1物方点1在图像上的投影点为a,物方点2在图像上的投影坐标为b,影像的内方位元素已知焦距为3464.10162像素,像主点偏移量为2000像素。将像点坐标、影像位置和相机内参代入观测角公式(1)中可以得到观测角度∠aob的值。观测角公式(1)如下:
[0036][0037]
式中o是影像的摄影中心,a和b为物方点1和2在图像上的投影点,为光线oa在像空间坐标系中的向量表达,为光线ob在像空间坐标系中的向量表达,∠aob为观测角度。
[0038][0039][0040]
式中x1、y1为物方点1在图像上投影点的像点坐标,x2、y2为物方点2在图像上投影点的像点坐标;c
x
、cy为相机内参中的像主点偏移量;-f为相机焦距。
[0041]
3.2光线oa在像空间坐标系中的向量表达为(a-o),光线ob在像空间坐标系中的向量表达为(b-o),则可根据观测角公式(2)构建未知数方程。物方点a和b未知,一共有6个未知数,每一张影像通过公式(1)得到一个观测角度∠aob,将得到的6个角度构建方程,联合求解物方a、b两点的坐标。观测角公式(2)如下:
[0042][0043]
式中o是影像的摄影中心,a和b为影像观测到的物方两点,∠aob为观测角度。
[0044]
具体的方程求解过程是使用谷歌开源ceres solver进行解算,选择的初始迭代坐标为(30,0,0)和(-30,0,0)。
[0045]
表3:最终计算得到的两物方点
[0046] xyz物方点137.8937219700990.000000000024-0.000007417518物方点2-37.893721970099-0.000000000025-0.000007417518
[0047]
最终的计算结果为表3所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1