一种地铁轨行区道床排水沟智能除垢系统的工作方法与流程
1.本发明属于轨道交通运营工务维修技术领域,具体涉及一种地铁轨行区道床排水沟智能除垢系统的工作方法。
背景技术:
2.目前地铁轨行区道床排水沟沟壁水垢巡检主要依靠人工检查、人工铲除的方式。由于地铁轨行区巡检时间只能在列车停运时间之后,对于道床排水沟的巡检时间短、线路长、清理难度及工作量大;故需要设计一种地铁轨行区道床排水沟智能除垢系统的工作方法,减少工务维保人员巡检时间及工作量,进一步降低运营成本。
技术实现要素:
3.本发明的目的是根据上述现有技术的不足之处,提供一种地铁轨行区道床排水沟智能除垢系统的工作方法,该系统根据采集的地铁轨行区道床两侧排水沟壁的视频图像,建立图像识别计算模型,判断水垢有无情况及水垢严重程度,进而联动控制对水垢进行喷药、自动刮铲、冲洗和收集。
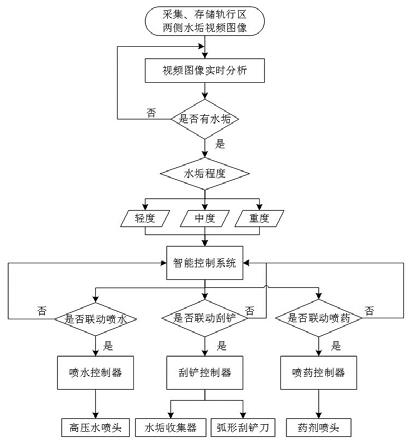
4.本发明目的实现由以下技术方案完成:一种地铁轨行区道床排水沟智能除垢系统的工作方法,其特征在于,包括:(1)由高清摄像机采集并储存地铁轨行区道床两侧排水沟壁的视频图像,并将所述视频图像上传至图像分析服务器;(2)通过所述图像分析服务器对所述视频图像进行综合分析,以判断所述道床两侧水沟壁水垢有无情况及水垢严重程度;若所述图像分析服务器未判断到所述道床水沟壁有水垢的情况,则继续保持图像分析;若所述图像分析服务器判断到所述道床水沟壁有水垢的情况,则所述图像分析服务器进一步综合分析水垢的严重程度,并将分析结果上传至智能控制系统,所述智能控制系统再将其结果上传至显示终端;(3)所述智能控制系统根据所述图像分析服务器综合分析结果,联动喷药控制器控制药剂喷头根据水垢的严重程度喷洒不同剂量的药水,然后所述智能控制系统联动刮铲控制器、喷水控制器,对喷洒药水后的水垢进行自动刮铲、冲洗和收集。
5.述图像分析服务器判断所述道床两侧水沟壁水垢有无情况及水垢严重程度的方法包括以下步骤:(1)根据所述高清摄像机采集的地铁轨行区道床两侧排水沟壁的视频图像进行判定分析,排水沟正常为黑灰色,若有水垢则为灰白色,结合rgb颜色空间,构建rgb颜色空间立方体模型;其中,所述rgb颜色空间立方体模型中原点(0,0,0)的颜色是纯黑色,顶点(255,255,255)的颜色是纯白色,从原点到顶点的连线即为标准灰度线,它的颜色从黑色到白色渐变;
(2)所述rgb颜色空间立方体模型中,灰度空间近似定义为以所述标准灰度线为轴线,选取某一距离为半径作一圆柱体中的颜色空间,设连线上有点,长度取,则长度,水垢颜色识别区可定义为以为轴线,为半径的圆柱体内的颜色空间;(3)所述rgb颜色空间立方体模型中,设所述高清摄像机采集图像颜色空间点到灰度线的距离为:,在对角线线上的投影为,长度为,则水垢判别可表示为:;其中:;为所述高清摄像机采集的实际数据,取值范围分别为0~36,0~63,0~36。
6.所述智能控制系统联动控制所述刮铲控制器、所述喷水控制器,对喷洒药水后的水垢进行自动刮铲、冲洗和收集,具体为:所述刮铲控制器控制弧形刮铲刀根据道床水垢的严重程度自动刮铲,所述喷水控制器控制高压水喷头对刮铲后的道床水沟进行高压冲洗,最后水垢收集器收集冲洗后的水垢。
7.本发明的优点是:1、该系统根据采集的地铁轨行区道床两侧排水沟壁的视频图像,建立图像识别计算模型,判断水垢有无情况及水垢严重程度,其判别精确度高,避免人为判别的误差;2、该系统根据基于图像识别计算模型综合分析的水垢严重程度数据,联动控制对水垢进行喷药、自动刮铲、冲洗和收集,智能化程度高,提升了排水沟除垢的效率,减轻了维护工作量,降低了运营维护成本。
附图说明
8.图1为本发明中rgb颜色空间模型的示意图;图2为本发明中自动除垢系统组成图;图3为本发明中自动除垢系统断面布置图;图4为本发明中自动除垢流程图。
具体实施方式
9.以下结合附图通过实施例对本发明的特征及其它相关特征作进一步详细说明,以便于同行业技术人员的理解:如图1-4所示,各附图标记分别为:摄像机1、图像分析服务器2、智能控制系统3、显示终端4、喷水控制器5、刮铲控制器6、喷药控制器7、高压水喷头8、水垢收集器9、弧形刮铲刀10、药剂喷头11、轨道巡检车12。
10.实施例:如图1-4所示,本实施例具体涉及一种地铁轨行区道床排水沟智能除垢系统的工作方法,包括:(1)利用如图1中所示的自动除垢系统进行巡检,由高清摄像机1采集并储存地铁轨行区道床两侧排水沟壁的视频图像,并将视频图像上传至图像分析服务器2;(2)通过图像分析服务器2对视频图像进行综合分析,以判断道床两侧水沟壁水垢有无情况及水垢严重程度;若图像分析服务器2未判断到道床水沟壁有水垢的情况,则继续保持图像分析;若图像分析服务器2判断到道床水沟壁有水垢的情况,则图像分析服务器2进一步综合分析水垢的严重程度,并将分析结果上传至智能控制系统3,智能控制系统3再将其结果上传至显示终端4;(3)智能控制系统3根据图像分析服务器2综合分析结果,联动喷药控制器7控制药剂喷头11根据水垢的严重程度喷洒不同剂量的药水,然后智能控制系统3联动刮铲控制器6、喷水控制器5,对喷洒药水后的水垢进行自动刮铲、冲洗和收集;具体为:刮铲控制器6控制弧形刮铲刀10根据道床水垢的严重程度自动刮铲,喷水控制器5控制高压水喷头8对刮铲后的道床水沟进行高压冲洗,最后水垢收集器9收集冲洗后的水垢。
11.本实施例中,如图1-4所示,图像分析服务器2判断所述道床两侧水沟壁水垢有无情况及水垢严重程度,具体的判定算法为:(1)根据高清摄像机1采集的地铁轨行区道床两侧排水沟壁的视频图像,排水沟正常为黑灰色,若有水垢则为灰白色,结合rgb颜色空间,构建rgb颜色空间立方体模型;其中, rgb颜色空间立方体模型中原点(0,0,0)的颜色是纯黑色,顶点(255,255,255)的颜色是纯白色,从原点到顶点的连线即为标准灰度线,它的颜色从黑色到白色渐变;(2)rgb颜色空间立方体模型中,灰度空间近似定义为以标准灰度线为轴线,选取某一距离为半径作一圆柱体中的颜色空间,设连线上有点,长度取,则长度,水垢颜色识别区可定义为以为轴线,为半径的圆柱体内的颜色空间;实际图像识别中,摄像机1采集图像为格式,需做如下变换:,为摄像机1采集的实际数据,取值范围分别为0~36,0~63,0~36。
12.(3)rgb颜色空间立方体模型中,设摄像机1采集图像颜色空间点到灰度线的距离为:,在对角线线上的投影为,长度为,则水垢判别可表示为:
。
13.如图2、3所示,本实施例中所采用的自动除垢系统,包括设置在轨道巡检车12上的摄像机1、图像分析服务器2、智能控制系统3、显示终端4、喷水控制器5、刮铲控制器6、喷药控制器7、高压水喷头8、水垢收集器9、弧形刮铲刀10、药剂喷头11;摄像机1与图像分析服务器2连接,图像分析服务器2与智能控制系统3连接,智能控制系统3与显示终端4连接,智能控制系统3还与喷水控制器5、刮铲控制器6、喷药控制器7连接,喷水控制器5与高压水喷头8连接,刮铲控制器6与水垢收集器9、弧形刮铲刀10连接,喷药控制器7与药剂喷头11连接,其中:摄像机1,采集并储存轨行区两侧水垢视频图像,与图像分析服务器2连接;图像分析服务器2,用于图像智能分析,判断道床排水沟是否有水垢,进而综合判断水垢的严重程度是轻度、中度还是重度;智能控制系统3,用于联动控制喷药控制器7、刮铲控制器6、喷水控制器5;显示终端4,连接智能控制系统3,用于显示水垢智能巡检处理的情况,工务维保人员通过显示终端4实时查看水垢智能巡检的工作效率;药剂喷头11,用于根据喷药控制器7的信号实时喷洒处理水垢的药水;弧形刮铲刀10,用于根据挂铲控制器6的信号实时对水垢进行刮铲作业;水垢收集器9与弧形刮铲刀10连接一起,在刮铲作业之后立即进行水垢收集工作;高压水喷头8,用于根据喷水控制器5的信号实时对水垢进行高压水冲洗作业。
14.本实施例中,智能控制系统3为工业计算机,其接收图像分析服务器2综合判断水垢的严重程度是轻度、中度还是重度的信号,并联动控制喷药控制器7、刮铲控制器6、喷水控制器5,起到中间控制的作用。
15.本实施例中,显示终端4为显示屏,显示水垢智能巡检处理的图像、视频。
16.本实施例中,喷水控制器5、刮铲控制器6、喷药控制器7为基于单片机或者arm处理器的控制板,且控制板输出端连接驱动板。智能控制系统3根据水垢的严重程度是轻度、中度还是重度的信号,对喷水控制器5、刮铲控制器6或喷药控制器7进行控制,三者均为基于单片机或者arm处理器的控制板,控制板与智能控制系统3(工业计算机)通过rs232或者rs2485通讯线进行数据通信,当控制板接收到智能控制系统3(工业计算机)的对应控制信号,喷水控制器5、刮铲控制器6或喷药控制器7再控制其对应的底层执行部件工作。
17.本实施例中,高压水喷头8前端设置第一电磁阀,第一电磁阀输入端通过管路连接高压储水箱,第一电磁阀与喷水控制器5电连接。当喷水控制器5发送控制信号到高压水喷头8对水垢进行高压水冲洗作业时,首先第一电磁阀开启,高压储水箱与高压水喷头8之间的管路导通,进行高压水喷头8可以实现喷水。
18.本实施例中,水垢收集器9中设置负压泵,水垢收集器9通过管路连接到弧形刮铲
刀10。在刮铲控制器6控制弧形刮铲刀10完成刮铲作业之后,立即控制水垢收集器9进行水垢收集工作,弧形刮铲刀10上设置水垢抽吸口,水垢抽吸口通过管路连接到水垢收集器9,由于水垢收集器9中设置负压泵,水垢收集器9内是负压状态,进行管路以及水垢抽吸口也是负压状态,可以对水垢进行抽吸。
19.本实施例中,弧形刮铲刀10上设置电机,电机与所述刮铲控制器6电连接。当挂铲控制器6控制弧形刮铲刀10实时对水垢进行刮铲作业,首先控制电机进行旋转动作,进行控制弧形刮铲刀10实现来回的刮铲作业。
20.本实施例中,药剂喷头11前端设置第二电磁阀,第二电磁阀输入端通过管路连接高压储药剂箱,所述第二电磁阀与所述喷药控制器7电连接。当喷药控制器7发送控制信号到药剂喷头11实时喷洒处理水垢的药水,首先第二电磁阀开启,高压储药剂箱与药剂喷头11之间的管路导通,进行药剂喷头11可以实现喷水。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1