一种视频图像三维位置提取方法与流程
1.本发明涉及图像信号处理领域,具体涉及一种视频图像三维位置提取方法。
背景技术:
2.现如今视频图像采集技术已非常成熟而普遍,小到社区大到整个城市均安装有视频采集设备,可实时进行视频图像采集。
3.随着计算机技术的发展,近年来三维技术尤其是三维建模技术也得到很大的发展。这种技术广泛运用于城市社区的展示工作中。参观者可从屏幕显示的三维仿真模型场景中结合实拍的图像一目了然地观览城市社区风光。
4.然而,三维场景的位置如何与视频采集设备实时采集到的图像位置一一对应,是一个亟待解决的工程难点。目前,常采用人工的方法,一一记录视频采集设备的安装地点,并粗略且繁琐地与三维场景中的位置一一匹配。这种方式不仅使得整个展示系统的可移植性差,因为每部署在一个新的地点,便需通过人力再次匹配三维场景与视频图像的位置;还无法实时在三维场景中跟踪视频图像中的动态目标,例如行进的汽车。
技术实现要素:
5.针对现有技术中的上述不足,本发明提供的一种视频图像三维位置提取方法解决了视频图像三维位置的自动提取的问题。
6.为了达到上述发明目的,本发明采用的技术方案为:一种视频图像三维位置提取方法,包括以下步骤:
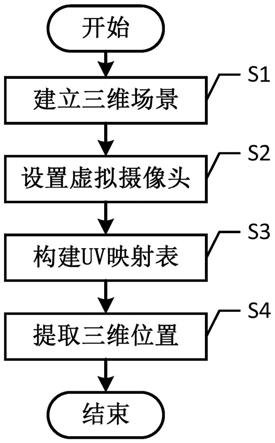
7.s1、通过3d建模工具,建立真实现场的三维场景;
8.s2、根据真实现场的视频图像采集设备的位置,在三维场景的对应位置设置虚拟摄像头,并校准视频图像采集设备与虚拟摄像头的角度;
9.s3、通过shader着色器针对三维场景构建uv映射表;
10.s4、根据uv映射表,提取每个虚拟摄像头所摄取的视频图像的像素点所对应的三维位置,实现通过视频图像的像素位置快速找到三维位置。
11.进一步地,所述步骤s3包括以下分步骤:
12.s301、通过shader着色器对三维场景进行u轴坐标着色;
13.s302、采集u轴坐标着色后的三维场景的像素值;
14.s303、根据像素转换方程组,由u轴坐标着色后的三维场景的像素值得到u轴坐标值;
15.s304、通过shader着色器对三维场景进行v轴坐标着色;
16.s305、采集v轴坐标着色后的三维场景的像素值;
17.s306、根据像素转换方程组,由v轴坐标着色后的三维场景的像素值得到v轴坐标值;
18.s307、通过shader着色器对三维场景进行x轴坐标着色;
19.s308、采集x轴坐标着色后的三维场景的像素值;
20.s309、根据像素转换方程组,由x轴坐标着色后的三维场景的像素值得到x轴坐标值;
21.s310、通过shader着色器对三维场景进行x轴符号着色;
22.s311、采集x轴符号着色后的三维场景的像素值;
23.s312、根据像素转换方程组,由x轴符号着色后的三维场景的像素值得到x轴符号值;
24.s313、通过shader着色器对三维场景进行y轴坐标着色;
25.s314、采集y轴坐标着色后的三维场景的像素值;
26.s315、根据像素转换方程组,由y轴坐标着色后的三维场景的像素值得到y轴坐标值;
27.s316、通过shader着色器对三维场景进行y轴符号着色;
28.s317、采集y轴符号着色后的三维场景的像素值;
29.s318、根据像素转换方程组,由y轴符号着色后的三维场景的像素值得到y轴符号值;
30.s319、通过shader着色器对三维场景进行z轴坐标着色;
31.s320、采集z轴坐标着色后的三维场景的像素值;
32.s321、根据像素转换方程组,由z轴坐标着色后的三维场景的像素值得到z轴坐标值;
33.s322、通过shader着色器对三维场景进行z轴符号着色;
34.s323、采集z轴符号着色后的三维场景的像素值;
35.s324、根据像素转换方程组,由z轴符号着色后的三维场景的像素值得到z轴符号值;
36.s325、根据三维场景每一个像素的x轴坐标值、x轴符号值、y轴坐标值、y轴符号值、z轴坐标值和z轴符号值,通过三维坐标计算方程组,计算得到三维场景每一个像素的三维位置,并根据u轴坐标值和v轴坐标值构建表征了uv坐标-三维位置映射关系的uv映射表。
37.进一步地,所述步骤s303、s306、s309、s312、s315、s318、s321、s324中的像素转换方程组包括以下等式:
38.r=frac(d
·
1)
·
255
ꢀꢀꢀ
(1)
39.g=frac(d
·
255)
·
255
ꢀꢀꢀ
(2)
40.b=frac(d
·
255
·
255)
·
255
ꢀꢀꢀ
(3)
41.a=frac(d
·
255
·
255
·
255)
·
255
ꢀꢀꢀ
(4)
42.rlt=vector(r,g,b,a)
·
43.vector(1,1/255,1/(255
·
255),1/(255
·
255
·
255))
ꢀꢀꢀ
(5)
44.其中,r为红色分量,g为绿色分量,b为蓝色分量,a为透明分量,frac()为取括号内变量的小数部分的函数,vector()为四维向量函数,d为像素转换方程组输入值,rlt为像素转换方程组输出值。
45.进一步地,所述步骤s325中的三维坐标计算方程组包括以下等式:
46.tx=x
·
sx
ꢀꢀꢀ
(6)
47.ty=y
·
sy
ꢀꢀꢀ
(7)
48.tz=z
·
sz
ꢀꢀꢀ
(8)
49.其中,x为x轴坐标值,sx为x轴符号值,y为y轴坐标值,sy为y轴符号值,z为z轴坐标值,sz为z轴符号值,tx为三维位置x坐标值,ty为三维位置y坐标值,tz为三维位置z坐标值。
50.进一步地,所述步骤s4包括以下分步骤:
51.s41、获取每个虚拟摄像头所摄取的视频图像中每个像素点的横坐标i和纵坐标j;
52.s42、获取视频图像的宽a与高b;
53.s43、通过以下两式计算视频图像每个像素点的u轴坐标值和v轴坐标值:
54.u=i/a
ꢀꢀꢀ
(9)
55.v=j/b
ꢀꢀꢀ
(10)
56.其中,u为u轴坐标值,v为v轴坐标值。
57.s44、根据uv映射表,通过每个像素点的u轴坐标值和v轴坐标值,得到视频图像每个像素点的三维位置,实现通过视频图像的像素位置快速找到三维位置。
58.本发明的有益效果为:通过3d建模工具,建立真实现场的三维场景,使用shader着色器针对x轴坐标、x轴符号、y轴坐标、y轴符号、z轴坐标和z轴符号进行着色,将着色后的三维场景的像素值,根据像素转换方程组,得到x轴坐标值、x轴符号值、y轴坐标值、y轴符号值、z轴坐标值和z轴符号值,通过三维坐标计算方程组,计算得到三维场景每一个像素的三维位置,并根据u轴坐标值和v轴坐标值构建表征了uv坐标-三维位置映射关系的uv映射表,根据uv映射表,提取每个虚拟摄像头所摄取的视频图像的三维位置,实现通过视频图像的像素位置快速找到三维位置;通过本发明可批量快速提取得到视频图像的三维场景位置信息,达到节约人力成本且满足实时性的需求。
附图说明
59.图1为一种视频图像三维位置提取方法流程示意图。
具体实施方式
60.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
61.如图1所示,在本发明的一个实施例中,一种视频图像三维位置提取方法,包括以下步骤:
62.s1、通过3d建模工具,建立真实现场的三维场景。
63.s2、根据真实现场的视频图像采集设备的位置,在三维场景的对应位置设置虚拟摄像头,并校准视频图像采集设备与虚拟摄像头的角度。
64.s3、通过shader着色器针对三维场景构建uv映射表,包括以下分步骤:
65.s301、通过shader着色器对三维场景进行u轴坐标着色;
66.s302、采集u轴坐标着色后的三维场景的像素值;
67.s303、根据像素转换方程组,由u轴坐标着色后的三维场景的像素值得到u轴坐标
值;
68.s304、通过shader着色器对三维场景进行v轴坐标着色;
69.s305、采集v轴坐标着色后的三维场景的像素值;
70.s306、根据像素转换方程组,由v轴坐标着色后的三维场景的像素值得到v轴坐标值;
71.s307、通过shader着色器对三维场景进行x轴坐标着色;
72.s308、采集x轴坐标着色后的三维场景的像素值;
73.s309、根据像素转换方程组,由x轴坐标着色后的三维场景的像素值得到x轴坐标值;
74.s310、通过shader着色器对三维场景进行x轴符号着色;
75.s311、采集x轴符号着色后的三维场景的像素值;
76.s312、根据像素转换方程组,由x轴符号着色后的三维场景的像素值得到x轴符号值;
77.s313、通过shader着色器对三维场景进行y轴坐标着色;
78.s314、采集y轴坐标着色后的三维场景的像素值;
79.s315、根据像素转换方程组,由y轴坐标着色后的三维场景的像素值得到y轴坐标值;
80.s316、通过shader着色器对三维场景进行y轴符号着色;
81.s317、采集y轴符号着色后的三维场景的像素值;
82.s318、根据像素转换方程组,由y轴符号着色后的三维场景的像素值得到y轴符号值;
83.s319、通过shader着色器对三维场景进行z轴坐标着色;
84.s320、采集z轴坐标着色后的三维场景的像素值;
85.s321、根据像素转换方程组,由z轴坐标着色后的三维场景的像素值得到z轴坐标值;
86.s322、通过shader着色器对三维场景进行z轴符号着色;
87.s323、采集z轴符号着色后的三维场景的像素值;
88.s324、根据像素转换方程组,由z轴符号着色后的三维场景的像素值得到z轴符号值;
89.s325、根据三维场景每一个像素的x轴坐标值、x轴符号值、y轴坐标值、y轴符号值、z轴坐标值和z轴符号值,通过三维坐标计算方程组,计算得到三维场景每一个像素的三维位置,并根据u轴坐标值和v轴坐标值构建表征了uv坐标-三维位置映射关系的uv映射表。
90.步骤s303、s306、s309、s312、s315、s318、s321、s324中的像素转换方程组包括以下等式:
91.r=frac(d
·
1)
·
255
ꢀꢀꢀ
(1)
92.g=frac(d
·
255)
·
255
ꢀꢀꢀ
(2)
93.b=frac(d
·
255
·
255)
·
255
ꢀꢀꢀ
(3)
94.a=frac(d
·
255
·
255
·
255)
·
255
ꢀꢀꢀ
(4)
95.rlt=vector(r,g,b,a)
·
96.vector(1,1/255,1/(255
·
255),1/(255
·
255
·
255))
ꢀꢀꢀ
(5)
97.其中,r为红色分量,g为绿色分量,b为蓝色分量,a为透明分量,frac()为取括号内变量的小数部分的函数,vector()为四维向量函数,d为像素转换方程组输入值,rlt为像素转换方程组输出值。
98.步骤s325中的三维坐标计算方程组包括以下等式:
99.tx=x
·
sx
ꢀꢀꢀ
(6)
100.ty=y
·
sy
ꢀꢀꢀ
(7)
101.tz=z
·
sz
ꢀꢀꢀ
(8)
102.其中,x为x轴坐标值,sx为x轴符号值,y为y轴坐标值,sy为y轴符号值,z为z轴坐标值,sz为z轴符号值,tx为三维位置x坐标值,ty为三维位置y坐标值,tz为三维位置z坐标值。
103.s4、根据uv映射表,提取每个虚拟摄像头所摄取的视频图像的像素点所对应的三维位置,实现通过视频图像的像素位置快速找到三维位置;
104.步骤s4包括以下分步骤:
105.s41、获取每个虚拟摄像头所摄取的视频图像中每个像素点的横坐标i和纵坐标j;
106.s42、获取视频图像的宽a与高b;
107.s43、通过以下两式计算视频图像每个像素点的u轴坐标值和v轴坐标值:
108.u=i/a
ꢀꢀꢀ
(9)
109.v=j/b
ꢀꢀꢀ
(10)
110.其中,u为u轴坐标值,v为v轴坐标值。
111.s44、根据uv映射表,通过每个像素点的u轴坐标值和v轴坐标值,得到视频图像每个像素点的三维位置,实现通过视频图像的像素位置快速找到三维位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1