一种静态物体网络模型的渲染方法及装置与流程
1.本技术提供一种渲染技术,尤其涉及一种静态物体网络模型的渲染方法。本技术还涉及一种静态物体网络模型的渲染装置。
背景技术:
2.电子技术的发展,为用户提供了基于虚拟时空的工作、生活以及娱乐的新体验,作为虚拟时空的重要组成部分,网络场景的真实度,很大程度的决定了用于体验的好坏。通常,网络时空中静态物体网络模型的高细节、高精度渲染,能够给用户带来震撼的感觉,吸引用户,和提高用户体验,而这些离不开渲染技术的不断进步。
3.现有的虚拟时空中静态物体网络模型都是采用基于模型数据进行渲染,对于一个高度真实的静态物体网络模型来说,在虚拟时空中将进行难以估量的计算,这些对于模型渲染的速度影响极大,在一个要求实时性的虚拟空间中,不得不降低模型渲染质量来提升速度。
技术实现要素:
4.为解决模型渲染计算量大,时间长,静态物体网络模型难以进行高质量渲染的问题,本技术提供一种静态物体网络模型的渲染方法。本技术还涉及一种静态物体网络模型的渲染装置。
5.本技术提供一种静态物体网络模型的渲染方法,包括:获取静态物体网络模型的网格数据和纹理数据;将网格数据参数映射到纹理数据的平面区域,形成包括所述网格数据参数的平面几何图像,将所述平面几何图像压缩后存储到网络存储器中;为所述平面几何图像建立通用识别码,并根据所述静态物体网络模型的位姿状态和所述通用识别码建立模型资源列表;根据所述模型资源列表从所述网络存储器中加载模型数据,根据预设视距提取所述平面几何图像中的多个采样点,以所述采样点的网格数据参数和所述纹理数据的映射关系对所述静态物体网络模型进行渲染。
6.可选的,所述网络存储器连接有:备份存储器,检测并根据所述备份存储器和所述网络存储器中数据的差别,提取或者发送差别数据。
7.可选的,所述对所述静态物体网络模型进行渲染,包括:加载压缩分辨率的静态物体网络模型,并在加载完成后重新加载完整分辨率的静态物体网络模型。
8.可选的,所述位姿状态包括:所述静态物体网络模型的旋转、缩放或位移。
9.可选的,所述网络存储器是分布式架构。
10.本技术还提供一种静态物体网络模型的渲染装置,包括:
获取模块,用于获取静态物体网络模型的网格数据和纹理数据;存储模块,用于将网格数据参数映射到纹理数据的平面区域,形成包括所述网格数据参数的平面几何图像,将所述平面几何图像压缩后存储到网络存储器中;预载模块,用于为所述平面几何图像建立通用识别码,并根据所述静态物体网络模型的位姿状态和所述通用识别码建立模型资源列表;渲染模块,用于根据所述模型资源列表从所述网络存储器中加载模型数据,根据预设视距提取所述平面几何图像中的多个采样点,以所述采样点的网格数据参数和所述纹理数据的映射关系对所述静态物体网络模型进行渲染。
11.可选的,还包括:备份存储器,用于检测并根据所述备份存储器和所述网络存储器中数据的差别,提取或者发送差别数据。
12.可选的,所述渲染模块还包括:加载单元,用于加载压缩分辨率的静态物体网络模型,并在加载完成后重新加载完整分辨率的静态物体网络模型。
13.可选的,所述位姿状态包括:所述静态物体网络模型的旋转、缩放或位移。
14.可选的,所述网络存储器是分布式架构。
15.本技术技术方案相对于现有技术的优点是:本技术提供一种静态物体网络模型的渲染方法,包括:获取静态物体网络模型的网格数据和纹理数据;将网格数据参数映射到纹理数据的平面区域,形成包括所述网格数据参数的平面几何图像,将所述平面几何图像压缩后存储到网络存储器中;为所述平面几何图像建立通用识别码,并根据所述静态物体网络模型的位姿状态和所述通用识别码建立模型资源列表;根据所述模型资源列表从所述网络存储器中加载模型数据,根据预设视距提取所述平面几何图像中的多个采样点,以所述采样点的网格数据参数和所述纹理数据的映射关系对所述静态物体网络模型进行渲染。通过平面图像采样替换静态物体网络模型采样进行渲染,节省大量计算资源,提高计算速度的同时保证了渲染质量不会降低。
附图说明
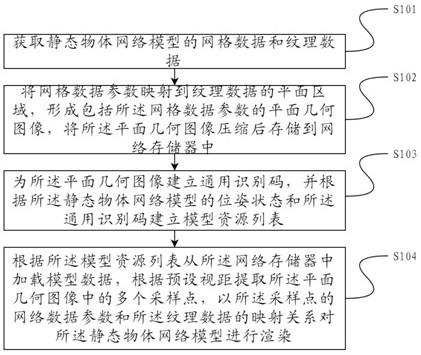
16.图1是本技术中静态物体网络模型的渲染流程图。
17.图2是本技术中静态物体网络模型采样渲染流程图。
18.图3是本技术中静态物体网络模型的渲染装置示意图。
具体实施方式
19.在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似推广,因此本技术不受下面公开的具体实施的限制。
20.本技术提供一种静态物体网络模型的渲染方法,包括:获取静态物体网络模型的网格数据和纹理数据;将网格数据参数映射到纹理数据的平面区域,形成包括所述网格数据参数的平面几何图像,将所述平面几何图像压缩后存储到网络存储器中;为所述平面几何图像建立通用识别码,并根据所述静态物体网络模型的位姿状态和所述通用识别码建立
模型资源列表;根据所述模型资源列表从所述网络存储器中加载模型数据,根据预设视距提取所述平面几何图像中的多个采样点,以所述采样点的网格数据参数和所述纹理数据的映射关系对所述静态物体网络模型进行渲染。通过平面图像采样替换静态物体网络模型采样进行渲染,节省大量计算资源,提高计算速度的同时保证了渲染质量不会降低。
21.图1是本技术中静态物体网络模型的渲染流程图。
22.请参照图1所示,s101获取静态物体网络模型的网格数据和纹理数据。
23.对于一个静态物体网络模型来说,其可分为两个部分,第一部分是网格数据,另一部分是纹理数据。
24.所述网格数据是指形成所述静态物体网络模型的单元面,所述单元面是组成所述静态网络模型的最小的不可分割的面,这些单元面可以是三角形,也可以是多边形。
25.所述单元面组成的静态物体网络模型,通过添加纹理数据后进行渲染,最终可以形成渲染后的静态物体网络模型,渲染后的所述静态物体网络模型是用户在虚拟时空中可见的各种物体。
26.当得到一个待渲染的静态物体网络模型,本技术首先将所述静态物体网络模型分为两组数据,分别为网格数据和纹理数据,并获取所述网格数据和纹理数据。
27.请参照体1所示,s102将网格数据参数映射到纹理数据的平面区域,形成包括所述网格数据参数的平面几何图像,将所述平面几何图像压缩后存储到网络存储器中。
28.本技术中,所述纹理数据是对网格数据的修饰数据,这些纹理数据和网格数据是一一对应的,即每个网格的纹理数据和该网格是具有映射关系的。所述纹理数据可以视为一张图像,所述图像描述了每个像素点对应的网格数据上的所述单元面的颜色、材质和光学特性等参数。
29.将所述网格数据的网格数据参数映射到所述纹理数据的平面区域,即将所述静态物体的网络模型上的每个单元面的参数映射到所述纹理数据的图像上,所述网格数据参数包括:每个单元面的位姿数据,即坐标和方向的数据。经过上述处理,形成一种带有网格数据参数的平面几何图像。然后,将所述平面几何图像进行压缩并存储到网络存储器中。
30.本技术中所述网络存储器是所述网络存储器是分布式架构的存储系统,例如nas,其主要包括:存储器件和内嵌系统软件。具体的,所述网络存储器在一个局域网上占有自己的节点,允许用户在网络上存取数据。通过集中管理和处理网络上的所有数据,将负载从应用或企业服务器上卸载下来。
31.所述网络存储器通过网络直接连接磁盘储存阵列,磁阵列具备了高容量、高效能、高可靠等特征。将存储设备通过标准的网络拓扑结构连可以无需服务器直接上网,不依赖通用的操作系统,而是采用一个面向用户设计的,专门用于数据存储的简化操作系统,并且内置与网络连接所需的协议。
32.本技术所述网络存储器还连接有备份存储器,检测并根据所述备份存储器和所述网络存储器中数据的差别,提取或者发送差别数据。具体的,可以设置所述备份存储器为多个网络存储器中的一部分,或者单独设置一个备份存储器连接到网络节点上。
33.请参照图1所示,s103为所述平面几何图像建立通用识别码,并根据所述静态物体网络模型的位姿状态和所述通用识别码建立模型资源列表。
34.本技术所示通用识别码是基于当前时间、计数器(counter)和硬件标识,例如无线
网卡的mac地址等数据计算生成的,唯一表示所述平面几何图像的识别码。
35.当所述通用识别码建立后,根据所述通用识别码和所述静态物体网络模型的位姿状态建立模型资源列表,所述静态物体的网络位姿状态包括:所述静态物体网络模型的旋转、缩放或位移参数,具体的,所述位姿状态表示所述静态物体网络模型在虚拟时空中的位置和方向,包括:所述静态物体网络模型的旋转、缩放或位移。
36.本技术中所述模型资源列表是静态物体网络模型的列表,包括在所述虚拟时空中的全部或者部分静态物体网络模型。
37.请参照图1所示,s104根据所述模型资源列表从所述网络存储器中加载模型数据,根据预设视距提取所述平面几何图像中的多个采样点,以所述采样点的网格数据参数和所述纹理数据的映射关系对所述静态物体网络模型进行渲染。
38.本技术中所述模型数据指平面几何图像,所述模型资源列表列出了所述虚拟时空中所包含的各个静态物体网络模型。根据所述模型资源列表,从所述网络存储器中加载所述平面几何图像,进行静态物体网络模型的渲染。
39.图2是本技术中静态物体网络模型采样渲染流程图。
40.请参照图2所示,s201,首先从所述平面几何图像中获取网格数据参数。
41.s202,根据所述静态物体网络模型在虚拟时空中的位姿,所述位姿即静态物体网络模型的位置和姿态,然后确定所述静态网络模型的采样点数量和采样点。
42.具体的,可以设置多个距离阈值,并为连续的两个阈值组成的区间设置一个采样点数量值,然后通过所述距离阈值所在的阈值区间确定采样点数量。所述区间的长度是固定的且是预先设定的,用q字母表示。
43.根据所述距离阈值确定所述采样点数量的公式如下:其中,所述n是采样点数量,所述a是视角的一半角度值,所述是采样点数量和视距远近的关系系数,所述关系系数根据距离的远近是动态变化的,所述i表示所述静态物体所在区间。
44.s203,选取采样点后,根据所述采样点和网格数据参数的映射关系确定所述采样点处的网格数据参数和纹理数据,结合所述采样点的网格数据参数和纹理数据,对静态物体网络模型进行渲染。
45.在本技术中,所述对所述静态物体网络模型进行渲染还包括:加载压缩分辨率的静态物体网络模型,并在加载完成后重新加载完整分辨率的静态物体网络模型。所述压缩分辨率和完整分辨率是指所述采样点是否按照预设采样点数量完全采集。具体的,当第一次加载所述静态物体网络模型的时候,先选择一个较低的分辨率的静态物体网络模型进行渲染,当所述静态物体网络模型出现在所述虚拟时空中后,在加载高清的静态物体网络模型。
46.本技术还提供一种静态物体网络模型的渲染装置,包括:获取模型301、存储模块
302、预载模块303和渲染模块304。
47.图3是本技术中静态物体网络模型的渲染装置示意图。
48.请参照图3所示,获取模块301,用于获取静态物体网络模型的网格数据和纹理数据。
49.对于一个静态物体网络模型来说,其可分为两个部分,第一部分是网格数据,另一部分是纹理数据。
50.所述网格数据是指形成所述静态物体网络模型的单元面,所述单元面是组成所述静态网络模型的最小的不可分割的面,这些单元面可以是三角形,也可以是多边形。
51.所述单元面组成的静态物体网络模型,通过添加纹理数据后进行渲染,最终可以形成渲染后的静态物体网络模型,渲染后的所述静态物体网络模型是用户在虚拟时空中可见的各种物体。
52.当得到一个待渲染的静态物体网络模型,本技术首先将所述静态物体网络模型分为两组数据,分别为网格数据和纹理数据,并获取所述网格数据和纹理数据。
53.请参照体3所示,存储模块302,用于将网格数据参数映射到纹理数据的平面区域,形成包括所述网格数据参数的平面几何图像,将所述平面几何图像压缩后存储到网络存储器中。
54.本技术中,所述纹理数据是对网格数据的修饰数据,这些纹理数据和网格数据是一一对应的,即每个网格的纹理数据和该网格是具有映射关系的。所述纹理数据可以视为一张图像,所述图像描述了每个像素点对应的网格数据上的所述单元面的颜色、材质和光学特性等参数。
55.将所述网格数据的网格数据参数映射到所述纹理数据的平面区域,即将所述静态物体的网络模型上的每个单元面的参数映射到所述纹理数据的图像上,所述网格数据参数包括:每个单元面的位姿数据,即坐标和方向的数据。经过上述处理,形成一种带有网格数据参数的平面几何图像。然后,将所述平面几何图像进行压缩并存储到网络存储器中。
56.本技术中所述网络存储器是所述网络存储器是分布式架构的存储系统,例如nas,其主要包括:存储器件和内嵌系统软件。具体的,所述网络存储器在一个局域网上占有自己的节点,允许用户在网络上存取数据。通过集中管理和处理网络上的所有数据,将负载从应用或企业服务器上卸载下来。
57.所述网络存储器通过网络直接连接磁盘储存阵列,磁阵列具备了高容量、高效能、高可靠等特征。将存储设备通过标准的网络拓扑结构连可以无需服务器直接上网,不依赖通用的操作系统,而是采用一个面向用户设计的,专门用于数据存储的简化操作系统,并且内置与网络连接所需的协议。
58.本技术所述网络存储器还连接有备份存储器,检测并根据所述备份存储器和所述网络存储器中数据的差别,提取或者发送差别数据。具体的,可以设置所述备份存储器为多个网络存储器中的一部分,或者单独设置一个备份存储器连接到网络节点上。
59.请参照图3所示,预载模块303,用于为所述平面几何图像建立通用识别码,并根据所述静态物体网络模型的位姿状态和所述通用识别码建立模型资源列表。
60.本技术所示通用识别码是基于当前时间、计数器(counter)和硬件标识,例如无线网卡的mac地址等数据计算生成的,唯一表示所述平面几何图像的识别码。
61.当所述通用识别码建立后,根据所述通用识别码和所述静态物体网络模型的位姿状态建立模型资源列表,所述静态物体的网络位姿状态包括:所述静态物体网络模型的旋转、缩放或位移参数,具体的,所述位姿状态表示所述静态物体网络模型在虚拟时空中的位置和方向,包括:所述静态物体网络模型的旋转、缩放或位移。
62.本技术中所述模型资源列表是静态物体网络模型的列表,包括在所述虚拟时空中的全部或者部分静态物体网络模型。
63.请参照图3所示,渲染模块304,用于根据所述模型资源列表从所述网络存储器中加载模型数据,根据预设视距提取所述平面几何图像中的多个采样点,以所述采样点的网格数据参数和所述纹理数据的映射关系对所述静态物体网络模型进行渲染。
64.本技术中所述模型数据指平面几何图像,所述模型资源列表列出了所述虚拟时空中所包含的各个静态物体网络模型。根据所述模型资源列表,从所述网络存储器中加载所述平面几何图像,进行静态物体网络模型的渲染。
65.图2是本技术中静态物体网络模型采样渲染流程图。
66.请参照图2所示,s201,首先从所述平面几何图像中获取网格数据参数。
67.s202,根据所述静态物体网络模型在虚拟时空中的位姿,所述位姿即静态物体网络模型的位置和姿态,然后确定所述静态网络模型的采样点数量和采样点。
68.具体的,可以设置多个距离阈值,并为连续的两个阈值区间设置一个采样点数量值,然后通过所述距离所在的阈值区间确定采样点数量。所述区间的长度是固定的且是预先设定的,用q字母表示。
69.根据所述距离阈值确定所述采样点数量的公式如下:其中,所述n是采样点数量,所述a是视角的一半角度值,所述是采样点数量和视距远近的关系系数,所述关系系数根据距离的远近是动态变化的,所述i表示所述静态物体所在区间。
70.s203,选取采样点后,根据所述采样点和网格数据参数的映射关系确定所述采样点处的网格数据参数和纹理数据,结合所述采样点的网格数据参数和纹理数据,对静态物体网络模型进行渲染。
71.在本技术中,所述对所述静态物体网络模型进行渲染还包括:加载压缩分辨率的静态物体网络模型,并在加载完成后重新加载完整分辨率的静态物体网络模型。所述压缩分辨率和完整分辨率是指所述采样点是否按照预设采样点数量完全采集。具体的,当第一次加载所述静态物体网络模型的时候,先选择一个较低的分辨率的静态物体网络模型进行渲染,当所述静态物体网络模型出现在所述虚拟时空中后,在加载高清的静态物体网络模型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1