基于大数据的盾构机工作姿态实时预测方法与流程
1.本发明属于盾构机技术领域,具体是基于大数据的盾构机工作姿态实时预测方法。
背景技术:
2.近年来大型水利隧道、交通隧道和城市地铁为代表的地下工程在规模和数量上呈现出不断上涨的趋势。盾构法是建设城市地下隧道的首选工法,它具有环保、安全、高效等特点,盾构法施工的基本原理是圆柱体的钢组件沿着设计的轴线在地下掘进,在掘进的过程中同步铺设支撑管片。相较于tbm岩石掘进机,盾构机的掘进过程更加精细,操作系统更加复杂,如何实现盾构机智能化掘进是当前亟待解决的科学技术问题。盾构领域的一大难点和热点问题为盾构机姿态控制,目前还主要停在人工控制阶段,已有理论和数值模型不能对盾构机的姿态进行实时指导。而且由于盾构机姿态问题,很多工程会出现管片开裂、错台,进一步影响工程质量,造成工期延后。
3.与此同时机器学习以及近年来它的最新分支深度学习,为非计算机领域的众多研究方面提供了新的研究手段和方法,在医疗、交通、工程和社会众多领域得到了大量应用,具有广阔的应用前景和潜在价值。在盾构机姿态控制掘进领域,其根本控制对象是盾构机掘进过程中各系统的参数,基于机器学习的优势和特点,可将机器学习运用在盾构领域。目前国内外在这方面进行了一定量的尝试,但这些尝试大多基于单一的姿态参数,且未明确提出针对epb型盾构机的标准数据预处理算法,缺乏较为成熟智能掘进系统。
4.目前盾构机姿态的预测及纠偏问题上已经取得了一定成果,然而,从预测目标的角度分析,上述预测研究的输出变量大多是单个数值,其次,从输入数据角度,尽管上述预测模型的输入数据包含较多变量,但由于数据频次低、规模小,缺乏专用的数据预处理方案,面临复杂地层难以适应的问题,综上所述,对于盾构机姿态智能预测问题,仍具有以下难点:
①
盾构机姿态预测属于多维序列数据输入(盾构众多运行参数序列数据)和多目标求解(多个姿态参数)问题,预测难度更高;
②
姿态智能纠偏本质上为通过过去信息预测未来信息,面临着大规模时间序列数据处理的挑战;
③
实际现场纠偏对计算效率具有一定要求,在选择算法时需要考虑计算效率和预测精度之间的平衡。盾构机姿态失准是盾构隧道施工中常见问题之一,也是影响隧道施工质量的重要因素,传统基于事后控制的施工方式,主要依赖人工经验,缺乏定量分析和控制的手段,为此,本发明对盾构机姿态失准的机理进行了分析,提出了基于事前控制的盾构机姿态调整策略方法,分别对盾构机姿态、盾构位置和盾构运动趋势3大模块,共8个导向参数进行了研究。
技术实现要素:
5.本发明的目的是针对以上问题,本发明提供了基于大数据的盾构机工作姿态实时预测方法,具有实时预测准确与快捷的优点。
6.为实现上述目的,本发明提供如下技术方案:
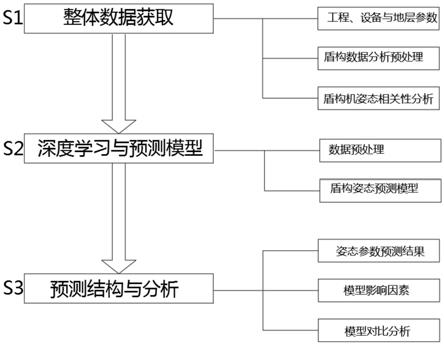
7.基于大数据的盾构机工作姿态实时预测方法,具体操作步骤包括:
8.s1、整体数据获取:
9.s1-1、工程、设备与地层参数获取:所述设备包括土压平衡盾构机和盾构姿态测量设备,采集的参数包括刀盘系统、主驱动系统、皮带机系统、推进系统、铰接系统的相关参数,采集频率为1hz,全天24小时不间断采集;
10.盾构姿态测量设备为自动导向系统,自动记录的信息包括盾构机姿态参数、位置参数和运动趋势,采集频率为30s 1次;
11.所述地层参数包括粘聚力、含水率、内摩擦角、抗剪强度、压缩模量;
12.s1-2、盾构机数据分析预处理:包含数据分割、离散点处理、缺失值处理、数据降噪四部分模块;根据盾构数据特点,采用大数据自动分割算法,利用3σ准则识别和处理了离散值,采用python里面的time模块识别了缺失值,采用高低通滤波法对数据进行滤波降噪处理;
13.s1-3、盾构机姿态与操作参数进行皮尔森相关系数法分析:采用皮尔森相关系数法分析盾构机操作参数和姿态参数之间的相关性,去掉无关变量;
14.s2、深度学习与预测模型:
15.s2-1、数据预处理:将原始数据针对每个时间序列的参数值分别做标准化处理,标准化方法采用z-score标准化,将原始数据进行线性变换使其值域分布在[-1,1]附近,线性变换的公式如下:
[0016][0017]
式中:u为输入数据某一维度的均值;σ为输入数据某一维度的标准差。标准差标准化算法使输入、输出数据符合标准正态分布;
[0018]
s2-2、盾构姿态预测模型:以gru为主要算法,将输入数据和输出数据处理成时间序列的形式,采用过去多段掘进段的特征参数对下一个掘进段姿态参数进行预测,伴随着盾构机向前掘进,数据序列不断滚动,从而实现实时连续预测;模型预测参数包含盾构姿态、盾构位置、盾构运动趋向的相关参数,每个参数独立训练,最后整合预测结果,形成复合预测模型;
[0019]
s3、预测结构与分析:
[0020]
s3-1、姿态参数预测结果:采用均方根误差(rmse)、平均绝对误差(mae)、决定系数(r2)综合评价模型预测效果;
[0021]
s3-2、模型影响因素分析:采用未数据预处理和不同模型结构进行综合对比分析;
[0022]
s3-3、模型对比分析:模型搭建利用tensorflow平台keras库神经网络库和scikit-learn机器学习库。
[0023]
进一步地,将所述数据预处理后的标准化数据进行分类处理,分为训练集、验证集与测试集,训练集与验证集的数据汇总后选取最优超参数;对具有最优超参数的结构进行模型优化,并且进入下一阶段工作,判断模型误差是否满足要求,此时测试集数据参与判断,如果模型误差不满足要求,进入到上一步进行二次模型优化;如果模型误差满足要求则直接输出,操作完毕。
[0024]
进一步地,所述盾构机数据分析预处理中数据分割是基于盾构数据特点,掘进过
程分为起始、上升、稳定、下降四个阶段,利用python代码开发自动分割算法;离散值处理是利用3σ准则识别和处理离散值;缺失值处理是采用python里的time模块识别缺失值;降噪处理是采用高低通滤波法中的butterworth滤波器对数据进行降噪处理。
[0025]
进一步地,盾构姿态预测模型是由时间序列模型建立,该时间序列模型由预测区域与时间步组成,时间序列模型对应到盾构机姿态预测问题上,输入变量为盾构机过去时刻的运行参数,输出变量为盾构机未来时刻姿态参数。
[0026]
进一步地,预测结构与分析中姿态参数预测结果包括盾构机姿态预测、盾构位置预测、盾构运动趋势预测;模型影响因素包括数据降噪与堆叠隐藏层。
[0027]
进一步地,盾构机姿态相关性分析包括有盾构机姿态与全部掘进参数、主掘进参数与推进系统参数。
[0028]
进一步地,所述深度学习与预测模型步骤中数据预处理是由模型输入与输出、数据标准化两大部分组成,其中模型输入由vmt导向系统记录的盾构机姿态相关的参数,包括姿态参数、位置参数和运动趋势参数。
[0029]
进一步地,针对模型对应姿态参数的预测效果采用均方根误差(rmse)、平均绝对误差(mae)、决定系数(r2)综合评价:
[0030][0031][0032][0033]
式中,n是样本总数f(xi)是盾构机姿态的预测值,yi是实测值,是盾构机姿态预测值的平均值,是实测值的平均值;
[0034]
且模型搭建语言为python,搭建平台为tensorflow后端的深度学习框架keras和scikit-learn机器学习库,在模型构建过程中,共用到了多组数据包,模型的运行环境为windows10系统。
[0035]
为确保盾构机在地下空间可以按照隧道设计轴线掘进,首先需要精确、实时地测量盾构机的整体姿态、目前位置及运动趋势,现场盾构机姿态参数的测量和轴线的偏差主要通过全站仪,在施工测量阶段,在盾构机后面的管壁上固定一个自动全站仪,对目标靶进行连续、实时监测,并把采集的数据传回中央控制室,在控制屏上实时显示盾构机的姿态参数,然后通过测量值与设计值的比对,工程测量人员判断掘进偏差,然后由盾构驾驶员及时调整姿态,完成盾构机的纠偏工作,全站仪采集的主要姿态参数主要分为盾构机姿态参数、位置参数和运动趋向参数三大块内容:
[0036]
(1)姿态参数:盾构机的姿态变化一般用俯仰角(pitch)、横摆角(yaw)、扭转角(roll)来描述,俯仰角:表示盾构机中心轴线与水平面产生的夹角,表征盾构机在垂直面上的位置,沿盾构机掘进方向,盾头中心点高于水平面,则俯仰角为正,反之为负;滚动角:是刀盘旋转时盾体绕自身轴线转动的趋势,其正负值定义如下:沿盾构机掘进方向,盾头中心点高于水平面,则俯仰角为正,反之为负;盾构轴线位于dta水平投影右侧时,横摆角为正,
反之为负,滚动角顺时针旋转为正,反之为负;横摆角:是指盾构机中心轴线与dta在水平面上的投影曲线间的夹角,体现出盾构机在水平面上的位置。盾构轴线位于dta水平投影右侧时,横摆角为正,反之为负;
[0037]
(2)位置参数
[0038]
为描述当前盾构机的位置,通常采用盾构机首尾圆心与dta的偏差值进行度量,包含盾尾水平偏差(horizontal deviation of shield tail,hdst)、盾尾垂直偏差(vertical deviation of shield tail,vdst),盾头水平偏差(horizontal deviation of shield head,hdsh)、盾头垂直偏差(verticaldeviation of shield head,vdsh)四个参数21,其正负值定义如下:在垂直方向上,位于dta上方为正,反之为负;在水平方向上,位于dta右侧为正,反之为负;
[0039]
(3)运动趋向参数
[0040]
描述盾构机运动趋向参数主要为水平倾向和垂直倾向,是盾构机掘进过程中最重要的控制指标,根据水平倾向和垂直倾向,盾构司机可以实时人为预测到下一阶段盾构机的位置走势,在即将达到最大倾向程度时,及时调整盾构运行参数,具体情况可以参照图2与图3。
[0041]
作为本发明的一种优选技术方案,工程参数与地层参数以具体的工作环境为检测标准,设备参数则是结合工程参数与地层参数取决,该设备指的是盾构机。
[0042]
作为本发明的重要特点,盾构机数据预处理主要包括数据分割、数据异常点处理、缺失值处理、数据降噪。
[0043]
其中数据分割的具体处理过程是:盾构的原始数据以天为储存单位,不方便后期分析,为更高效的遍历所有数据,首先将单个csv文件合并成一个以时间为单位的连续数据集,然后将数据按“循环段”进行分割,“循环段”概念为盾构机从开机掘进到停机换步整个循环的时间段,根据循环段的概念,循环段的起点为主掘进参数首次出现非零值,循环段的终点为主掘进参数同步为零值,最后将划分好的数据再次保存为csv格式。
[0044]
关于数据异常点(离散值处理)处理的过程为:由于盾构掘进时的参数记录均来源于自动信息采集系统,而该系统所处的工作环境是一个移动中的有较强振动和电磁干扰的环境,有时会造成传感器和采集系统本身所采数据信息出现明显超出合理范围的突变异常数据,这样的数据应当予以去除,常见的处理方法有剔除、插值、均值替换、近邻替换等。
[0045]
关于数据缺失的处理为:在数据的采集过程中,难免会遇到信号中断或通讯光缆损伤,从而导致缺失值出现的现象。针对此类型数据,首先根据数据量计算单个掘进段的持续时间tl,然后利用开始和结束时间戳信息计算掘进时间差ts-e。最后利用公式计算单个掘进段中缺失数据占总数据量的百分比,即缺失率(miss ratio)。对于缺失率小于10%,称为小范围缺失。针对这样的数据,可以利用插值算法,对缺失值进行填补。当某个掘进段缺失值所占比例大于10%时,表明这个掘进段包含的信息太少,该循环段不再参与之后的模型训练阶段。
[0046]
关于数据降噪的具体处理过程为:数据在采集和传输过程中不可避免地会受到噪声干扰,严重时会影响后续深度学习模型工作的开展。本研究采用低通滤波法进行数据的降噪,滤波器采用巴特沃斯低通滤波器。巴特沃斯滤波器的特点是通频带内的频率响应曲
线最大限度平坦,没有起伏,而在阻频带则逐渐下降为零。巴特沃斯低通滤波器公式为其滤波器阶数越高,降噪的程度会越大。滤波器阶数与转换带宽度成反比。
[0047]
作为本发明的一种优选技术方案,盾构机姿态相关性分析包括有盾构机姿态与全部掘进参数、主掘进参数与推进系统参数,针对主掘进参数,在掘进过程中,司机主要靠控制刀盘转速和掘进速度两项指标参数,同时观察仪表盘上刀盘推力和刀盘扭矩的变化情况,保持盾构机的正常推进,为验证主掘进参数同盾构机姿态的相关性,计算各个盾构机姿态参数同刀盘转速、刀盘推力、刀盘扭矩和掘进速度等主掘进参数的相关系数;
[0048]
千斤顶推力差与行程差是直接决定盾构机姿态走向的参数,也是姿态纠偏的主要人工调节项,由于姿态参数直接受盾构机推进系统的影响,分别计算千斤顶推力差(右-左)、千斤顶行程差(右-左)、千斤顶推力差(下-上)和千斤顶行程差(下-上)同姿态参数的相关性,盾构机姿态与推进系统参数的相关性变化规律符合盾构司机的纠偏方案:千斤顶推力差(右-左)与hdsh有着极其强的正相关性,即千斤顶压力右大于左,盾首位置向水平方向偏移,同理,千斤顶推力差(下-上)则与vdsh有着极强的负相关性,除pitch和hdsh姿态参数外,千斤顶行程差(右-左)和千斤顶行程差(下-上)几乎与所有盾构机姿态参数具有良好的相关性。
[0049]
作为本发明的一种优选技术方案,深度学习与预测模型步骤中数据预处理是由模型输入与输出、数据标准化两大部分组成,其中模型输入由vmt导向系统记录的盾构机姿态相关的参数一共分为姿态参数、位置参数和运动趋势三大类、共8项参数;盾构司机可以通过观察这些参数的偏差变化,及时对盾构整体姿态做出调整,及时纠偏。
[0050]
作为本发明的一种优选技术方案,盾构姿态预测模型是由时间序列模型建立,且该时间序列模型又是由预测区域与时间步组成,时间序列模型对应到盾构机姿态预测问题上,输入变量为盾构机运行参数,输出变量为盾构机姿态参数;
[0051]
预测区间:预测区间指的是预测到多长时间段的盾构机姿态偏差。如果预测长度太短,盾构司机来不及根据预测结果调整姿态,从施工需求上讲,能够实现的预测区间长度越长越好,然而,预测区间长度过大时,预测精度便会下降,故其不能无限增大,必须在施工需求和预测精度取得平衡。
[0052]
作为本发明的一种优选技术方案,预测结构与分析中姿态参数预测结果包括有盾构机姿态预测、盾构位置预测、盾构运动趋势预测;模型影响因素包括有数据降噪与堆叠隐藏层,数据降噪采用低通滤波法进行数据的降噪,滤波器采用巴特沃斯低通滤波器,滤波器阶数越高,降噪的程度会越大,巴特沃斯低通滤波器可用如下公式:
[0053][0054]
式中,n为滤波器的阶数;ωc为截止频率,巴特沃斯滤波器的特点是通频带内的频率响应曲线最大限度平坦,没有起伏,而在阻频带则逐渐下降为零,滤波器阶数与转换带宽
度成反比32,对于工程应用,低阶便满足大部分要求,而随着阶数的升高,降噪程度过大有可能造成信息的丢失,因此,本研究采用2阶滤波器,以一个循环段的刀盘扭矩t为例,图8是滤波降噪完之后的效果图,灰色点为原始数据,蓝色线为滤波降噪完之后的曲线。可以发现,降噪完噪声被有效的清理了,数据的平滑性也大大提高。
[0055]
与现有技术相比,本发明的有益效果如下:
[0056]
1、针对盾构数据海量体积、预测目标多而繁杂的特点,开发了数据标准预处理算法,大大加快了模型训练时间,提高了模型预测精度;针对目前盾构姿态的分析方式多为回归,本文采用五推一的超前预测模式,可在盾构姿态发生偏差前超前预测,提醒驾驶人员提前调整掘进参数。盾构姿态另一大问题便是现场工程应用时如何平衡预测精度和计算效率,因此我们选择处理时序预测数据更快、精度更高的gru算法建立盾构姿态预测模型。
[0057]
2、盾构机的整体工作环境为移动中带有较强电磁振动,使得原始数据不完整,不一致,且有较大离散性,直接影响盾构姿态模型建立。为此,提出了包含数据分割、离散点处理、缺失值处理、数据降噪等四部分模块的盾构数据标准预处理过程。根据盾构数据特点,开发了大数据自动分割算法,利用3σ准则识别和处理了离散值,采用python里面的time模块识别了缺失值,采用高低通滤波法对数据进行滤波降噪处理。
[0058]
3、盾构数据集的参数有500多项,包含大量冗余信息,如果使用全部状态参数进行预测势必会造成计算力的大量浪费以及模型泛化误差升高。筛选出与盾构姿态相关的掘进参数至关重要,为此,采用皮尔森相关系数法分析盾构机操作参数和姿态参数之间的相关性,去掉无关变量,从而减小计算量并提高预测精度。
[0059]
4、标准化数据集中的每个参数分布范围和量纲均不同,因此,需要对每个时间序列的参数值分别做标准化,加快深度学习模型的收敛过程,并在训练过程中防止梯度爆炸。
[0060]
5、盾构姿态预测问题本质上属于多维时间序列预测。通过回溯若干历史掘进参数信息来预测未来姿态信息,从而达到超前预警,提前指导驾驶人员调整操作参数的效果。
[0061]
6、常规模型预测参数只有一项,而本方法有包含盾构姿态、盾构位置、盾构运动趋向的8个参数。每个参数独立训练,最后整合预测结果,形成复合预测模型。
[0062]
7、采用均方根误差(rmse)、平均绝对误差(mae)、决定系数(r2)综合评价模型预测效果,模型在训练、验证及测试集上均显示较好的预测效果,三个指标均有较好的预测准确率。盾构姿态偏差实例验证表明,所提模型可以通过回溯历史多段掘进参数信息,提前给出未来盾构姿态,从而可以提前指导司机实现盾构姿态纠偏。
[0063]
8、为探讨影响盾构姿态模型的主要因素,采用未数据预处理和不同模型结构进行综合对比分析。结果显示,盾构原始数据具有较大噪音干扰,通过数据预处理可以提高模型的整体预测精度。不同结构的对比显示表明,1~2层gru层便可实现较好的预测精度,随着网络结构的复杂,模型训练时间增加,准确度降低。
[0064]
9、为验证所建立模型的优越性,与其他基础神经网络模型进行对比,模型搭建均利用tensorflow平台keras库神经网络库和scikit-learn机器学习库。对比结果表明gru由于重置门和更新门的存在,非常适合解决长期记忆和反向传播中的梯度爆炸问题,在提高模型预测精度的同时缩短了训练时间,可应用于现场隧道掘进过程,指导操作者提前纠正盾构机运行参数。
[0065]
综上所述,本专利采用文中提供的预测方法,能够有效减少计算机处理的工作量,
提升其工作效率,并且相对全面的建立数据模型,同时针对性分析,也能够保证盾构机工作姿态实时预测准确。
附图说明
[0066]
图1为本发明整体工作流程示意图;
[0067]
图2为本发明预测过程示意图;
[0068]
图3为本发明盾构机姿态参数示意图;
[0069]
图4为本发明盾构机位置参数示意图;
[0070]
图5为本发明盾构机姿态参数表。
具体实施方式
[0071]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0072]
如图1至图11所示,本发明提供基于大数据的盾构机工作姿态实时预测方法,盾构机工作姿态实时预测方法具体操作步骤为:
[0073]
s1、整体数据获取:
[0074]
s1-1、工程、设备与地层参数获取;
[0075]
s1-2、盾构数据分析预处理;
[0076]
s1-3、盾构机姿态相关性分析;
[0077]
s2、深度学习与预测模型:
[0078]
s2-1、数据预处理;
[0079]
s2-2、盾构姿态预测模型;
[0080]
s3、预测结构与分析:
[0081]
s3-1、姿态参数预测结果;
[0082]
s3-2、模型影响因素;
[0083]
s3-3、模型对比分析;
[0084]
盾构机工作姿态实时预测方法,又可包括有数据前分析与姿态预测模型两部分,具体操作步骤为:
[0085]
s1、数据前处理:
[0086]
s1-1、获取环境与地质参数,随后数据进行处理;
[0087]
s1-2、csv数据文件筛选并编译,随后进行相关性分析,确定与姿态最为相关的参数,问题数据处理;
[0088]
s1-3、将s1-1与s1-2处理好的数据转化为输入\输出时间序列,并将其输送到下一阶段;
[0089]
s2、姿态预测模型:
[0090]
s2-1、将数据前处理好的数据即标准化数据进行三部分分类处理:训练接、验证集与测试集;
[0091]
s2-2、训练集与验证集的数据汇总进入到选取最优超参数;
[0092]
s3-3、将s2-2的结构进行模型优化,并且其进入下一阶段工作,即模型误差是否满足要求,此时测试集数据也会参与判断;
[0093]
否,进入到上一步进行二次模型优化;是,则直接输出,操作完毕;
[0094]
为确保盾构机在地下空间可以按照隧道设计轴线掘进,首先需要精确、实时地测量盾构机的整体姿态、目前位置及未来运动趋势,现场盾构机姿态参数的测量和轴线的偏差主要通过全站仪,在施工测量阶段,在盾构机后面的管壁上固定一个自动全站仪,对目标靶进行连续、实时监测,并把采集的数据传回中央控制室,在控制屏上实时显示盾构机的姿态参数,然后通过测量值与设计值的比对,工程测量人员判断掘进偏差,然后由盾构驾驶员及时调整姿态,完成盾构机的纠偏工作,全站仪采集的主要姿态参数主要分为盾构机姿态参数、位置参数和运动趋向参数:
[0095]
(1)姿态参数:盾构机的姿态变化一般用俯仰角(pitch)、横摆角(yaw)、扭转角(roll)来描述,俯仰角:表示盾构机中心轴线与水平面产生的夹角,表征盾构机在垂直面上的位置,沿盾构机掘进方向,盾头中心点高于水平面,则俯仰角为正,反之为负;滚动角:是刀盘旋转时盾体绕自身轴线转动的趋势,其正负值定义如下:沿盾构机掘进方向,盾头中心点高于水平面,则俯仰角为正,反之为负;盾构轴线位于dta水平投影右侧时,横摆角为正,反之为负,滚动角顺时针旋转为正,反之为负;横摆角:是指盾构机中心轴线与dta在水平面上的投影曲线间的夹角,体现出盾构机在水平面上的位置。盾构轴线位于dta水平投影右侧时,横摆角为正,反之为负;
[0096]
(2)位置参数
[0097]
为描述当前盾构机的位置,通常采用盾构机首尾圆心与dta的偏差值进行度量,包含盾尾水平偏差(horizontal deviation of shield tail,hdst)、盾尾垂直偏差(vertical deviation of shield tail,vdst),盾头水平偏差(horizontal deviation of shield head,hdsh)、盾头垂直偏差(verticaldeviation of shield head,vdsh)四个参数21,其正负值定义如下:在垂直方向上,位于dta上方为正,反之为负;在水平方向上,位于dta右侧为正,反之为负;
[0098]
(3)运动趋向参数
[0099]
描述盾构机运动趋向参数主要为水平倾向和垂直倾向,是盾构机掘进过程中最重要的控制指标,根据水平倾向和垂直倾向,盾构司机可以实时人为预测到下一阶段盾构机的位置走势,在即将达到最大倾向程度时,及时调整盾构运行参数。
[0100]
其中,工程参数与地层参数以具体的工作环境为检测标准,设备参数则是结合工程参数与地层参数取决,该设备指的是土压平衡盾构机。
[0101]
其中,盾构机数据预处理主要分为数据分割、离散值处理、缺失值处理三大模块,盾构的原始数据以天为储存单位,不方便后期分析,为更高效的遍历所有数据,首先将单个csv文件合并成一个以时间为单位的连续数据集,然后将数据按“循环段”进行分割,“循环段”概念为盾构机从开机掘进到停机换步整个循环的时间段,根据循环段的概念,循环段的起点为主掘进参数首次出现非零值,循环段的终点为主掘进参数同步为零值,最后将划分好的数据再次保存为csv格式;
[0102]
由于盾构掘进时的参数记录均来源于自动信息采集系统,而该系统所处的工作环
境是一个移动中的有较强振动和电磁干扰的环境,有时会造成传感器和采集系统本身所采数据信息出现明显超出合理范围的突变异常数据,这样的数据应当予以去除,常见的处理方法有剔除、插值、均值替换、近邻替换等。
[0103]
其中,盾构机姿态相关性分析包括有盾构机姿态与全部掘进参数、主掘进参数与推进系统参数,针对主掘进参数,在掘进过程中,司机主要靠控制刀盘转速和掘进速度两项指标参数,同时观察仪表盘上刀盘推力和刀盘扭矩的变化情况,保持盾构机的正常推进,为验证主掘进参数同盾构机姿态的相关性,计算各个盾构机姿态参数同刀盘转速、刀盘推力、刀盘扭矩和掘进速度等主掘进参数的相关系数;
[0104]
千斤顶推力差与行程差是直接决定盾构机姿态走向的参数,也是姿态纠偏的主要人工调节项,由于姿态参数直接受盾构机推进系统的影响,分别计算千斤顶推力差(右-左)、千斤顶行程差(右-左)、千斤顶推力差(下-上)和千斤顶行程差(下-上)同姿态参数的相关性,盾构机姿态与推进系统参数的相关性变化规律符合盾构司机的纠偏方案:千斤顶推力差(右-左)与hdsh有着极其强的正相关性,即千斤顶压力右大于左,盾首位置向水平方向偏移。同理,千斤顶推力差(下-上)则与vdsh有着极强的负相关性,除pitch和hdsh姿态参数外,千斤顶行程差(右-左)和千斤顶行程差(下-上)几乎与所有盾构机姿态参数具有良好的相关性。
[0105]
其中,深度学习与预测模型步骤中数据预处理是由模型输入与输出、数据标准化两大部分组成,其中模型输入由vmt导向系统记录的盾构机姿态相关的参数一共分为姿态参数、位置参数和运动趋势参数;
[0106]
盾构司机可以通过观察这些参数的偏差变化,及时对盾构整体姿态做出调整,及时纠偏,因此,本研究将上述三类参数作为模型的输出变量。
[0107]
其中,盾构姿态预测模型是由时间序列模型建立,且该时间序列模型又是由预测区域与时间步组成,时间序列模型对应到盾构机姿态预测问题上,输入变量为盾构机运行参数,输出变量为盾构机姿态参数;
[0108]
预测区间:预测区间指的是预测到多长时间段的盾构机姿态偏差,如果预测长度太短,盾构司机来不及根据预测结果调整姿态,从施工需求上讲,能够实现的预测区间长度越长越好,然而,预测区间长度过大时,预测精度便会下降,故其不能无限增大,必须在施工需求和预测精度取得平衡;
[0109]
时间步:指的是回溯多远的距离,用于得到下一个步距的预测值,即根据历史多长时间段的数据来作为预测自变量,在确定预测区间长度的基础上,需确定回溯的时间步。
[0110]
其中,针对模型对应姿态参数的预测效果采用均方根误差(rmse)、平均绝对误差(mae)、决定系数(r2),其定义如下综合评价。:
[0111][0112][0113]
[0114]
式中,n是样本总数f(xi)是盾构机姿态的预测值,yi是实测值,是盾构机姿态预测值的平均值,是实测值的平均值;
[0115]
作为预测精度的指标,rmse和mae是表示模型预测值和实际值之间差异的指标类型,如果这些指标的值特别小,就意味着预测值与实际值吻合得很好,当r2值较大时,意味着模型输出和实际值之间存在很强的相关性,在实际模型中,我们期望较低的rmse和mae,以及较高的r2;
[0116]
且模型搭建语言为python,搭建平台为tensorflow后端的深度学习框架keras,在模型构建过程中,共用到了多组数据包,模型的运行环境为windows10系统。
[0117]
其中,预测结构与分析中姿态参数预测结果包括有盾构机姿态预测、盾构位置预测、盾构运动趋势预测;模型影响因素包括有数据降噪与堆叠隐藏层,数据降噪采用低通滤波法进行数据的降噪,滤波器采用巴特沃斯低通滤波器,滤波器阶数越高,降噪的程度会越大,巴特沃斯低通滤波器可用如下公式:
[0118][0119]
式中,n为滤波器的阶数;ωc为截止频率,巴特沃斯滤波器的特点是通频带内的频率响应曲线最大限度平坦,没有起伏,而在阻频带则逐渐下降为零,滤波器阶数与转换带宽度成反比32,对于工程应用,低阶便满足大部分要求,而随着阶数的升高,降噪程度过大有可能造成信息的丢失,因此,本研究采用2阶滤波器,以一个循环段的刀盘扭矩t为例,图8是滤波降噪完之后的效果图,灰色点为原始数据,蓝色线为滤波降噪完之后的曲线。可以发现,降噪完噪声被有效的清理了,数据的平滑性也大大提高。
[0120]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0121]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1