一种用于箱变内互感器辅助拆装的自动升降装置控制方法与流程
1.本发明涉及实时控制自动升降装置的控制方法,特别是一种用于箱变内互感器辅助拆装的自动升降装置控制方法。
背景技术:
2.升降装置主要用于物料的传送、零件额定位等,不仅可以提高设备的自动化程度,还能改善设备的加工柔性。目前市场上存在的升降装置主要有蜗轮丝杆升降机、升降台、丝杆螺母升降机构、齿轮齿条升降机构、锥齿轮升降机构、皮带升降、链条升降等。但由于工作环境的不同,市场上的升降装置并不能完全满足所有升降环境。目前,在箱式变电站内部零件的拆装维护过程中需要升降装置的参与,但目前所用的升降装置都需要人工控制升降装置的升降和左右移动,不能实现升降装置的自动精准控制,而且正常需要2-3人才能完成箱变内大部件的拆装。
3.有鉴于此,本发明针对上述技术缺陷,一种用于箱变内互感器辅助拆装的自动升降装置控制方法,以有效克服上述问题。
技术实现要素:
4.本发明的目的在于,针对现有技术的不足,提供科学合理,适用性强,效果佳的用于箱变内互感器辅助拆装的自动升降装置控制方法,用于升降装置的实时自动精准控制,以减少人力的浪费。
5.为实现上述目的,本发明所采用的技术方案为:一种用于箱变内互感器辅助拆装的自动升降装置控制方法,包括舌电信号控制和眼电信号控制,步骤如下:
6.1)舌电信号控制:
7.(a)利用脑电采集设备采集脑电信号;
8.(b)选取舌电信号明显的导联;
9.(c)对所选取导联的脑电信号进行预处理,提取舌电信号;
10.(d)计算所提取的舌电信号的特征;
11.(e)根据特征对舌电信号进行分类;
12.(f)控制自动升降装置升降;
13.2)眼电信号:
14.(g)选取眼电信号明显的导联;
15.(h)对所选取导联的脑电信号进行预处理,提取眼电信号;
16.(i)根据眼电信号特征识别出左右眼动;
17.(j)控制升降装置的左右移动。
18.进一步优选,所述步骤1)的(a)、(b)、(c),选取af3和af4两导联信号进行预处理,从而提取出舌电信号。
19.进一步优选,所述步骤1)的(d),利用长度为100的矩形移动窗,分别计算移动窗内
舌电信号的最大值、最小值、均值、标准差和方差五个特征。
20.进一步优选,所述步骤1)的(e),根据舌电信号的五个特征,利用bp神经网络对舌电信号进行识别分类。
21.进一步优选,所述的bp神经网络的输入层神经元个数为5,隐层神经元数为9,输出层神经元个数为3。
22.进一步优选,所述步骤1)的(f),当识别出是卷舌动作时,自动升降装置下降;当识别出是伸舌动作时,自动升降装置上升;当识别出是其他动作时,自动升降装置既不上升也不下降。
23.进一步优选,所述步骤2)的(g)和(h),选取af3和af4两导联信号进行预处理,从而提取出眼电信号。
24.进一步优选,所述步骤2)的(i),利用长度为50的移动矩形窗,计算移动窗内的pearson相关系数,当相关系数大于e时,认为执行眼动动作。当识别出眼动特征时,计算矩形窗内的最大值。以最大值为界限,分别在af3和af4导联脑电信号上向后选取10个采样点,利用最小二乘法对所选取的10个采样点进行一次拟合,获得af3和af4导联眼电信号变化的斜率,从而识别出左右眼动。
25.进一步优选,所述步骤2)的(j),当识别出左眼动作时,自动升降装置向左移;当识别出右眼动作时,自动升降装置向右移动;当识别出其他眼动动作时,自动升降装置保持不动。
26.本发明的一种基于人体生理信号的自动升降装置控制方法,其识别程度高,系统易于建立,方法易于实现,能够实现升降装置的实时自动精准控制,同时减少人力的浪费。具有科学合理,适用性强等优点。
附图说明
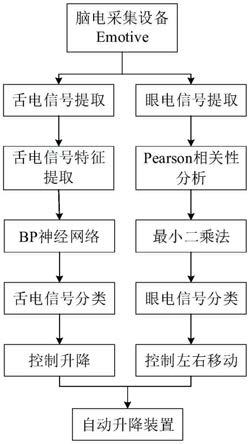
27.图1为本发明的一种用于箱变内互感器辅助拆装的自动升降装置控制方法流程图;
28.图2为本发明的一种用于箱变内互感器辅助拆装的自动升降装置控制方法中bp神经网络结构图。
具体实施方式
29.下面结合附图和实施例,对本发明做进一步说明。
30.参照图1,具体实施例的一种用于箱变内互感器辅助拆装的自动升降装置控制方法,包括舌电信号控制和眼电信号控制。舌电信号控制具体包括以下几个步骤:
31.步骤1、使用脑电采集设备emotive采集脑电信号;
32.步骤2、选取af3和af4两导联脑电信号作为舌电信号识别对象;
33.步骤3、利用步长为100采样点的移动矩形窗在所选取导联脑电信号上移动,在移动矩形窗内计算脑电信号的最大值、最小值、均值、标准差和方差五个特征。
34.步骤4.1、根据最大值、最小值、均值、标准差和方差五个特征对bp神经网络进行训练,具体过程为:
35.令n、m和l分别为输入层、隐藏层和输出层的神经元个数,则输入向量x=(x1,
x2,
…
,xi,
…
,xn)
t
;隐藏层输入向量nety=(nety1,nety2,
…
,netyj,
…
,netym)
t
,隐藏层输出向量y=(y1,y2,
…
,yj,
…
,ym)
t
;输出层输入向量neto=(neto1,neto2,
…
,netok,
…
,neto
l
)
t
,输出层输出向量o=(o1,o2,
…
,ok,
…
,o
l
)
t
,期望输出向量d=(d1,d2,
…
,dk,
…
,d
l
)
t
;输入层到隐藏层的权值矩阵v=(v1,v2,
…
,vj,
…
,vm);隐藏层到输出层的权值矩阵w=(w1,w2,
…
,wk,
…
,w
l
);偏移函数为f(1);样本数p=1,2,..,p;误差函数为:
[0036][0037]
bp神经网络的计算过程如下:
[0038]
(1)初始化:对权值矩阵w、v赋(-1,1)之间的随机数;误差e置0;学习率η设为(0~1]之间的小数;网络精度设为ζ;最大训练次数设为m。
[0039]
(2)在p个样本中随机选择第p个输入与相应的期望输出:
[0040]
x
p
=(x
1p
,x
2p
,...,x
ip
,...,x
np
)
[0041]dp
=(d
1p
,d
2p
,...,d
kp
,...,d
lp
)
[0042]
(3)输入训练样本对,计算各层输出:
[0043][0044][0045][0046][0047]
(4)计算各层误差信号:
[0048][0049][0050]
(5)调整各层权值:
[0051][0052][0053]
(6)计算总误差:
[0054][0055]
(7)检测网络总误差是否满足精度要求,若误差精度满足要求或者训练次数达到最大训练次数,结束训练;反之,跳转到(3)继续训练。
[0056]
步骤4.2、根据最大值、最小值、均值、标准差和方差五个特征并利用训练好的bp神经网络精准识别操作人员的伸舌和卷舌动作。
[0057]
步骤5、利用bp神经网络的识别结果对升降装置的升降进行精准控制。
[0058]
参照图1,具体实施例的一种用于箱变内互感器辅助拆装的自动升降装置控制方法,包括舌电信号控制和眼电信号控制。眼电信号控制具体包括以下几个步骤:
[0059]
步骤1、使用脑电采集设备emotive采集脑电信号;
[0060]
步骤2、选取af3和af4两导联脑电信号作为眼电信号识别对象;
[0061]
步骤3.1、利用步长为50个采样点的移动矩形窗在所选取导联的脑电信号上移动,在移动矩形窗内计算af3和af4两导联的pearson相关系数,计算公式如下所示。
[0062][0063]
其中,和表示矩形窗内af3和af4导联时间序列的均值,σ
x
,σy表示矩形窗内af3和af4导联时间序列的方差。当pearson相关系数大于0.65时,认为发生一次眼动动作。
[0064]
步骤3.2、当识别出眼动动作时,利用最小二乘法拟合af3和af4导联斜率,具体过程如下所示:
[0065]
(1)寻找矩形窗内最大值;
[0066]
(2)以最大值为界限,向后搜索10个采样点,利用最小二乘法对这10个采样点进行一次拟合,分别获得af3和af4两导联的变化斜率。最小二乘法的计算过程如下所示。
[0067]
假设一组观测数据:
[0068][0069]
如果向量组x1,x2,...,xm与y之间存在线性关系,得到n元线性预测公式
[0070][0071]
其中,a1,a2,...,am为待定常数,也称为回归系数。
[0072]
将观测值带入上式得到:
[0073][0074]
与yi之间的差异
[0075]
为了使差异ei最小,设
[0076][0077]
对上式求偏导整理得:
[0078][0079]
利用上式求解a1,a2,...,am,从而确定多元线性预测公式。
[0080]
(3)根据计算所得的af3和af4导联的变化斜率,判断左右眼动。若af3导联变化斜率大于af4导联变化斜率,则认为是左眼眼动;若af4导联变化斜率大于af3导联变化斜率,则认为是右眼眼动。
[0081]
步骤4、根据上述步骤识别出的左右眼动动作,对升降装置进行控制。若识别出是左眼眼动,则升降装置向左移动;若识别出是右眼眼动,则升降装置向右移动;若识别出其他类型的眼动动作,则升降装置不移动。
[0082]
参照图2,图2为本发明的一种用于箱变内互感器辅助拆装的自动升降装置控制方法中bp神经网络结构图。经过计算分析得,本发明所使用的bp神经网络的输入层神经元个数为5,隐含层神经元个数为9,输出层神经元个数为3。
[0083]
本发明一种用于箱变内互感器辅助拆装的自动升降装置控制方法所涉及的测量器具均为市售产品。
[0084]
以上实施例仅用以说明本发明而非限制本发明所描述的技术方案。因此,尽管本说明书
[0085]
参照上述的各个实施例对本发明已进行了详细的说明,但仍可对本发明进行修改或同等替换。其技术方案及其改进,均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1