一种基于优化理论的在航船舶尾气反算方法
1.本发明涉及一种基于优化理论的在航船舶尾气反算方法,属于船舶尾气遥感监测技术领域。
背景技术:
2.为了控制我国内河流域排放控制区由船舶尾气造成的大气污染,交通运输部最新对内河排放控制区船用燃油硫含量限制为0.1%m/m。
3.劣质船用燃油的使用,特别是硫含量超标燃油的使用,是造成船舶尾气排放超标,大气污染严重的一大重要原因。对于船用燃油的监督和控制,海事部门执法过程存在较大阻碍,目前主要使用对控制区船舶燃油进行抽取油样并送检的方式,加强对船用燃油的监督检查,存在周期长、范围小、耗费人力等诸多局限性。
4.为了提高海事部门执法能力和水平,地方逐渐介入科技尾气监督手段,如光谱分析技术、嗅探法和差分吸收激光雷达技术等等,为远程监测平台的建立提供了设备技术支持。
5.为了使得船舶尾气远程监测设备能够更好地与远程监测平台相结合,利用监测设备监测尾气浓度更有效准确地反算得到船舶尾气排放浓度,进而实现对超标排放的船只进行有效判断和捕捉,现阶段存在大量工程技术难题亟待探索和解决。
技术实现要素:
6.本发明所要解决的技术问题是:提供一种基于优化理论的在航船舶尾气反算方法,针对船舶尾气进行遥感监测,提高了由远程监测设备反推船舶尾气排放浓度的求解效率和求解精度。
7.本发明为解决上述技术问题采用以下技术方案:
8.一种基于优化理论的在航船舶尾气反算方法,包括如下步骤:
9.步骤1,通过fluent仿真软件建立以桥梁为基础的船舶尾气排放模型,利用船舶尾气排放模型分析船舶尾气扩散的影响因素;
10.步骤2,根据船舶尾气扩散的影响因素,结合高斯烟团模型,建立优化的高斯尾气扩散模型;
11.步骤3,根据优化的高斯尾气扩散模型,建立基于优化理论的在航船舶尾气反算模型,并对上述在航船舶尾气反算模型进行求解,实现由船舶尾气监测浓度求解船舶尾气源强。
12.作为本发明的一种优选方案,所述步骤1的具体过程如下:
13.步骤11,结合桥梁结构参数,建立船舶运行流场计算模型,其中,模型长1232m,宽1600m,高120m,桥梁高32m,船舶总长66.70m,总宽12.45m,吃水2.60m,烟囱高0.8m;
14.步骤12,确定模型计算条件,具体为:
15.(1)船舶尾气排放选择使用湍流方程,使用k-εepsilon模型,选择组分为二氧化
硫,打开组分输运模型,对二氧化硫的输运进行模拟;
16.(2)采用压力出口边界条件,外界气流来流方向设置为速度入口条件,速度大小为10m/s,船舶表面船头位置设置一个区域为二氧化硫的释放口,尾气排放速度设置为1.1kg/s,船体航行速度为3.75m/s;
17.(3)设置整个流场域为流体,全局初始化,并选用二阶差分格式;
18.(4)船舶在航状态下,尾气扩散传播为非稳态过程,采用非稳态进行迭代,设置计算时间步长为0.1s;
19.步骤13,在计算域内的水平及竖直方向分别棋盘式铺设20和16个监测点,分析船舶尾气在空间中的分布特征,监测点具体设置如下:令垂直于桥梁方向为行,平行于桥梁方向为列,则水平方向铺设的监测点为4行5列,水平方向的监测点与排放源在同一水平线,在平行于桥梁方向,相邻两个监测点间隔40m,在垂直于桥梁方向,相邻两个监测点间隔50m,且其中4个监测点设置在桥梁上,其余监测点设置于同一水平高度,并向船舶行驶方向延伸;垂直方向铺设的监测点位于桥纵平面,垂直方向铺设的监测点为4行4列,其中有4个监测点设置于桥面下方10m处,有4个监测点设置于桥面上,其余监测点设置于桥面上方,且在平行于桥面方向相邻两个监测点间隔40m,在垂直于桥面方向,桥面下方的监测点与桥面上监测点间隔10m,其余监测点间隔40m;
20.步骤14,船舶尾气扩散的影响因素包括船舶尾气排放时间、风速、船速以及船舶尾气扩散周边气候地理条件。
21.作为本发明的一种优选方案,所述步骤2中,以船舶尾气烟囱排放口为坐标原点,下风向方向为x轴正向,在水平面垂直x轴的方向为y轴,x轴正向左侧为y轴正向,垂直向上方向为z轴正向建立直角坐标系;
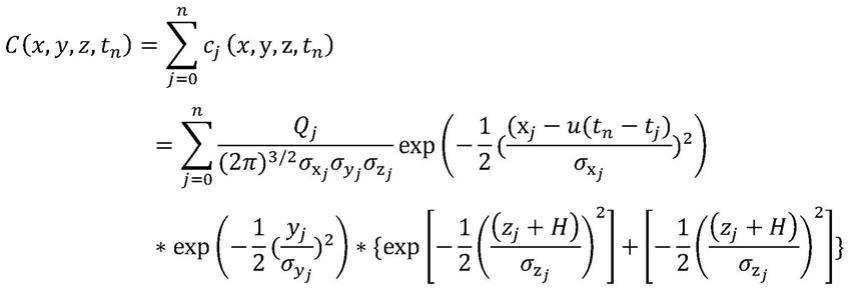
22.船舶行至tn时刻,对桥梁上监测点的浓度贡献值为船舶在各个时刻累积浓度贡献值之和,即:
[0023][0024]
其中,c(x,y,z,tn)表示船舶行驶至tn时刻,船舶对桥梁上监测点的总浓度贡献值;cj(x,y,z,tn)表示船舶行驶至tj时刻时排放的尾气扩散到下风向监测点(x,y,z)在tn时的浓度;qj表示tj时刻船舶尾气排放强度,单位kg/s;分别为tj时刻x、y、z轴上的大气扩散系数,大气扩散系数由pasquill-gifford模型计算得出;u为合成环境风速,单位m/s;h为污染源高度,单位为m;xj、yj、zj分别为tj时刻监测点在x、y、z轴方向的坐标值。
[0025]
作为本发明的一种优选方案,所述步骤3中,以船舶尾气浓度监测值和优化的高斯尾气扩散模型计算值之间的误差限制为目标函数,将船舶尾气源强求解的过程转换为最优化求解问题,利用智能优化算法对源强信息进行搜索,求得目标函数值最小的解即为源强
信息;
[0026]
在船舶尾气扩散下风向处棋盘式布置m个尾气监测器,用于监测下风向在航船舶的二氧化硫浓度,用符号表示第i个尾气监测器得到的监测浓度,表示第i个尾气监测器位置得到的计算浓度值,目标函数f(q)设为监测浓度值和计算浓度值的误差平方和,则源强信息反算问题归结为无约束最小值优化问题,目标函数f(q)为:
[0027][0028]
利用遗传算法或者粒子群算法求解以上无约束最小值优化问题,实现由船舶尾气监测浓度求解船舶尾气源强q。
[0029]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
[0030]
1、本发明针对船舶尾气排放监测,利用fluent软件对在航船舶尾气扩散过程进行建模仿真,并设置了36个垂直、水平监测点位分析尾气扩散的时空分布特征,结合对高斯扩散模型的对比分析,优化出基于高斯烟团的在航船舶连续扩散模型。再将智能优化算法(遗传算法和粒子群算法)应用到尾气扩散反算中,求出最优解。
[0031]
2、本发明提出了船舶尾气排放源强反算思路和方法,并利用仿真案例验证了反算方法的可行性,保证了由远程监测设备反推船舶尾气排放浓度的求解效率和求解精度,大大提高了海事部门对船舶尾气进行密切监管的执法能力和执法效率,加强了船舶尾气排放超标船只的监督控制范围,具有极强的工程实际意义。
附图说明
[0032]
图1是本发明基于优化理论的在航船舶尾气反算方法的流程图;
[0033]
图2是本发明方法监测点分布图,其中,(a)是水平方向,(b)是垂直方向;
[0034]
图3是本发明方法优化后的高斯模型示例图。
具体实施方式
[0035]
下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
[0036]
如图1所示,为发明基于优化理论的在航船舶尾气反算方法的流程图,具体步骤如下:
[0037]
步骤1:通过fluent仿真软件建立以南京大胜关大桥为基础的船舶尾气排放模型,分析船舶尾气排放的空间特征和影响因素。具体如下:
[0038]
步骤11:建立模型:结合南京大胜关长江大桥结构参数,建立船舶运行流场计算模型,部分参数设定值如下:其中模型长1232m,宽1600m,高120m,桥梁高32m,船舶总长66.70m,总宽12.45m,吃水2.60m,船高(烟囱高)0.8m。
[0039]
步骤12:确定计算条件和基本模型:
[0040]
(1)求解方程设置:fluent内含众多的物理模型。例如可压缩与不可压缩流动、层流和湍流、定常与非定常流动、传热、化学反应等。其中,湍流模型包含有spalart-allmaras模型、k-ε模型组、rsm组、les组、k-ω模型组等。船舶尾气排放选择使用湍流方程,使用经典
的k-εepsilon模型,选择组分为二氧化硫,打开组分输运模型,对二氧化硫的输运进行模拟。
[0041]
(2)边界条件设置:在模型计算过程中,为方便数值计算,采用比较常用的压力出口边界条件,外界气流来流方向设置为速度入口条件,速度大小为10m/s,船舶表面船头位置设置一个区域为二氧化硫的释放口,尾气排放速度设置为1.1kg/s,船体航行速度为3.75m/s。
[0042]
(3)初始化流场域:设置整个流场域为流体,全局初始化,并选用二阶差分格式。
[0043]
(4)迭代求解:船舶在航状态下,尾气扩散传播为非稳态过程,因此采用非稳态进行迭代,设置计算时间步长为0.1s。
[0044]
步骤12:水平和垂直计算监测点设置:为分析尾气在空间中的分布特征,在计算域内的水平及竖直方向分别棋盘式铺设20和16个检查点(如图2中的(a)和(b)所示)。其中,水平监测点与排放源(船高)在同一水平线,在桥梁平行方向,相邻两个监测点位间隔40m,在垂直于桥梁方向,相邻两个点位间隔50m,且1,2,3,4号点位设置在桥梁上;垂直监测点位于桥纵平面内,1,2,3,4号点位位于桥面下10m处,5,6,7,8号位于与桥面,在垂直于桥面方向上5-16号点位相邻两个点位间隔为40m,在平行于桥面方向上1-16号点位相邻两个点位间隔为40m。
[0045]
步骤13:船舶尾气时空分布特征:
[0046]
(1)船舶尾气排放时间是影响尾气扩散的一个重要因素:排放时间越长,空间监测位置尾气浓度受船舶尾气烟团扩散影响更为明显。
[0047]
(2)风速和船速的共同作用也是影响船舶尾气的重要因素。
[0048]
(3)在航船舶尾气扩散周边气候地理条件是影响船舶尾气扩散的重要因素。
[0049]
步骤2:根据船舶尾气空间分布分析,结合现有高斯模式下的大气扩散模型提出基于研究尾气扩散条件的优化高斯模型。具体如下:
[0050]
如图3所示,以下风向方向为x轴正向,垂直x轴的水平方向为y轴正向,垂直向上方向为z轴正向建立直角坐标系,并将坐标原点设定于船舶尾气烟囱排放口,即可建立以高斯烟团模型为基础的船舶尾气扩散模型。假设船舶行至tn时刻,船舶位于(xn,yn,zn),对桥梁上监测点的浓度贡献值为船舶在各个时刻,即t0、t1、t2、t3……
tn时刻,累积浓度贡献之和。下风向任意一点的船舶尾气浓度值可以表示为:
[0051][0052]
其中,cj(x,y,z,tn)表示船舶行驶至tj时刻时排放的废气扩散到下风向某一监测点(x,y,z)在tn时的浓度;qj表示tj时刻船舶尾气排放强度,单位kg/s;时刻船舶尾气排放强度,单位kg/s;分别为tj时刻x、y、z轴上的大气扩散系数;u为合成环境风速,单位m/s;h为污染源高度,单位为m。
[0053]
船舶是向桥梁方向行驶,并逐渐靠近然后离开桥梁。监测点是在不停监测尾气浓度的,并选取峰值浓度进行计算q进而判断是否超标,t0时刻指的是监测点能监测到尾气浓度由平稳到产生变化的时刻。
[0054]
大气扩散系数可由pasquill-gifford模型计算得出。大气稳定度根据风速和光照条件共分为6个等级,如表1所示。
[0055]
表1大气稳定度等级
[0056][0057][0058]
表中,a为极度不稳定,b为中度不稳定,c为轻度不稳定,d为中性稳定,e为轻微稳定,f为中度稳定。
[0059]
在pasquill-gifford模型中,大气稳定度等级与大气扩散系数的关系可以由表2得到:
[0060]
表2扩散系数与大气稳定度
[0061]
pasquill-gifford稳定度等级σy或σ
x
σza0.18x
0.92
0.60x
0.75
b0.14x
0.92
0.53x
0.75
c0.10x
0.92
0.34x
0.75
d0.06x
0.92
0.15x
0.75
e0.04x
0.92
0.10x
0.75
f0.02x
0.92
0.05x
0.75
[0062]
由表2可以得到,高斯烟团模型大气扩散系数σ
x
、σy、σz均为下风向距离x的指数函数,且σ
x
=σy。
[0063]
步骤3:根据优化后的高斯尾气扩散模型,建立基于优化理论的在航船舶尾气反算模型。
[0064]
通过建立船舶烟囱泄漏源、污染扩散以及尾气监测值之间的数量关系,以船舶尾气浓度监测值和扩散模型计算值之间的误差限制作为目标函数,从而将源强反向求解的过程转化为传统的最优化求解问题,利用智能优化算法对源强信息进行搜索,求的目标值最小的解即为目标源强信息。
[0065]
假设船舶尾气扩散下风向处按照棋盘式布置m个嗅探或光谱监测器,用于实施监测下风向某一点的二氧化硫浓度,用符号表示第i个尾气监测器得到的监测浓度,
表示第i个尾气监测器位置得到的计算尾气浓度值,目标函数f(q)设为监测浓度和计算浓度的误差平方和,故源强信息反算问题可以归结为目标函数无目标函数无约束多维极值问题求解,目标函数f(q)为:
[0066][0067]
利用遗传算法或者粒子群算法等智能优化算法求解以上无约束最小值优化问题,实现由船舶尾气监测浓度求解船舶尾气源强。
[0068]
实施例
[0069]
在船舶尾气监测设备安装时,目前一般选择船舶航道上方两侧桥梁位置,选取同一水平直线的两点作为尾气监测装备安装点。因此,选取监测点位在连续时间内监测浓度发生显著变化的同排监测点6号、7号监测点,此时船舶尾气浓度对监测位置影响较大。仿真实验中,船舶以13.5km/h(3.75m/s)的航行速度,由距离桥上游87.5m位置沿垂直于桥纵平面的直线以匀速面向桥的方向行驶,行驶过程中设置实时稳定均匀释放二氧化硫浓度速率为1.1kg/s,风速为10m/s。将坐标轴原点设置在船舶烟囱排放口船舶匀速行驶状态,因此坐标原点随船舶匀速移动,设定船舶航向为x轴,与自然风向同向,其中,6号和7号监测点分别位于航线两侧对称位置20m处,则y6=20,y7=-20,水平高度与船舶尾气排放源高度相同,z=0,l为船舶距离桥上游的距离,当船舶行驶ts时,l=87.5-3.75t,l0为船舶起点距离桥的距离,即l0=87.5m,6号和7号监测点距离桥下游距离为50m,因此,6号和7号的下风向x坐标为x
6、7
=50+l。
[0070]
由上述分析可知,船速和自然风速方向相同,合成之后的合成风速为6.25m/s。因此,由pasquill-gifford模型,可设置大气稳定度等级为c级,此时,σy=σ
x
=0.10x
0.92
,σz=0.34x
0.75
。
[0071]
取监测点位6和7的监测数据进行源强反算分析。
[0072]
表3部分监测点位监测浓度及相对坐标
[0073]
[0074][0075]
将上述数据以0.1s为一个单位代入上述目标函数最小值问题中,计算船舶行驶至17.8s时的船舶尾气扩散计算值,计算监测值和计算值之间的方差作为目标函数。目标函数值越小,说明监测值和计算值之间的误差越小,也就是反算效果最好,因此,优化目的是通过各种优化算法降低目标函数值,找寻尾气监测浓度值和计算浓度值的最佳配合,浓度值和计算浓度值的最佳配合,来求得泄漏源强度(q)和泄漏源位置(l0船舶起点与桥的距离)。
[0076]
使用遗传算法求解最优值:
[0077]
1、编码:对未知船舶尾气源强q和船舶-桥距离l0(船舶位置)进行实数编码。
[0078]
2、生成初始种群:首先设定种群大小为20(两个未知量-q和l0各设定10个个体),由初始种群产生函数(constraint dependent)随机产生。
[0079]
3、适应度函数:代入种群中个体到本问题中的目标函数,并计算船舶尾气计算浓度和监测浓度的误差平方和,其中,目标函数为各监测点监测浓度和计算浓度的误差平方和,列式为:
[0080][0081]
4、选择、交叉、变异操作:结合相关选择、交叉、变异模型,对群体中的个体进行运
算,不断完成新旧种群的更替过程,实现遗传算法全局搜索,达到向着最优源强信息解的迭代过程。
[0082]
5、设置最大进化代数500代,终止代数150代,对于新的种群,不断重复第4步操作,直至遗传算法迭代结果满足终止条件,此时,新代中适应度最高的个体作为本反算问题中的全局最优解,输出结果并画出迭代图。
[0083]
结果:遗传算法经过74次迭代时停止,求得源强二氧化硫排放强度为1.1066kg/m3,目标函数值14.9349045,船舶航行起点距离桥87.774m。
[0084]
以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1