横担旋转吊装牵引力及旋转点剪切力的计算方法及应用与流程
1.本发明属于输电线路施工技术领域,特别涉及横担旋转吊装牵引力及旋转点剪切力的计算方法及应用。
背景技术:
2.铁塔横担旋转吊装就位为一个动态的过程,起吊牵引绳和旋转螺栓所受的剪切力在起吊旋转过中一直在变化,若能快速分析出吊装受力和旋转角度的关系,并动态显示,将极大方便旋转吊装方案的优化选择,提高吊装过程的安全可靠度目前,旋转吊装计算只是通过力臂计算或cad矢量图求得某个固定角度的受力,且各种施工规范,组塔施工工艺导则中并无相关受力计算内容。然而,现有计算方法速度非常慢;无法实现快速计算整个旋转吊装过程的受力变化情况,不能动态反映真实的旋转吊装受力过程;无法确定整个起吊旋转过程中的最大受力及所在角度。
技术实现要素:
3.本发明的目的是针对上述现有技术的不足,提供横担旋转吊装牵引力及旋转点剪切力的计算方法及应用,分析旋转角度对整个抱杆受力系统的影响,优化旋转吊装方案中对抱杆外露、倾角及牵引绳绑扎固定位置等参数的设置,从而方便快速的对整个抱杆受力系统进行安全校核。
4.为解决以上技术问题,本发明采用的技术方案是:
5.横担旋转吊装牵引力及旋转点剪切力的计算方法及应用,包括以下步骤:
6.(1)建立铁塔平面坐标系统,以铁塔底部中心为坐标原点,水平方向为x轴,垂直方向为y轴,其中,
7.a、抱杆底部端n坐标为(xn,yn),旋转点v坐标为(xv,yv);
8.b、待吊构件初始垂直状态时θ=0
°
,重心o坐标为(xo,yo),初始起吊旋转绳绑扎受力点q坐标为(xq,yq);
9.c、抱杆长度为h,抱杆倾斜角为δ,吊装重量为g,旋转角度为θ;
10.(2)根据抱杆底部n坐标(xn,yn)和抱杆倾斜角δ,计算抱杆顶部m坐标(xm, ym);
11.(3)重心o点沿着半径r1的圆旋转,起吊旋转绳受力点沿着半径r2的圆旋转;
12.r1={(xo-xv)2+(yo-yv)2}
0.5
;
13.r2={(xq-xv)2+(yq-yv)2}
0.5
;
14.(4)根据吊件重心坐标o(xo,yo),初始起吊旋转绳受力点q坐标(xq,yq) 和旋转点v坐标(xv,yv),计算构件垂直状态时重心初始角度η和初始起吊旋转绳旋转初始角γ;
15.根据旋转角度θ的变化,计算重心o的旋转后坐标(xo',yo');
16.xo'=xo+{r1
×
sin(θ+η)-r1
×
sin(η)};
17.yo'=yo
±
{r1
×
cos(θ+η)-r1
×
cos(η)};
18.同理,计算旋转绳受力点q的旋转后坐标(xq',yq'):
19.xq'=xq+{r2
×
sin(θ+γ)-r2
×
sin(γ)};
20.yq'=yq
±
{r2
×
cos(θ+γ)
–
r2
×
cos(γ)};
21.(5)利用旋转点v坐标(xv,yv),抱杆顶端m坐标(xm,ym),旋转绳受力点q'坐标(xq',yq'),计算vm长度s,∠q'mv角φ,并求力臂l=s
×
sin φ;
22.根据静力平衡求解起吊旋转绳受力t:
23.t=g
×
(xo'-xv)/l
24.(6)根据平面三力汇交定理确定旋点剪切力方向,并通过q的旋转后坐标 (xq',yq')和抱杆顶部坐标(xm,ym),计算起吊滑车组轴线与铅垂线间的夹角β:
25.β=atan(|xq'-xm|/|yq'-ym|);
26.再通过平行四边形法则计算旋点剪切力f:
27.f=(g2+t
2-2
×g×
t
×
cosβ)
0.5
;
28.(7)提取起吊旋转绳受力t的最大值以及旋点剪切力f的最大值,论证旋转起吊方案是否可行,并选择最优抱杆外露、倾角及牵引绳绑扎固定位置。
29.步骤(1)中吊件重心坐标按形心考虑,采用分割法计算,且初始旋转角度θ满足抱杆顶部x坐标|xm|<旋转受力点x坐标|xq
′
|。
30.步骤(6)中若牵引绳受力变化较大,则根据最大β角及对应的牵引绳受力、最大牵引绳受力及对应的β角,两种工况分别计算整个主抱杆受力系统,校核计算是否满足受力要求,若牵引绳受力变化不大,则按最大β角校核,论证旋转起吊方案是否可行。
31.步骤(7)中,如若起吊旋转绳受力t的最大值小于起吊旋转绳的额定抗拉强度,且旋点剪切力f的最大值小于剪切点螺栓的允许剪切力,则旋转起吊方案可行;
32.如若起吊旋转绳的额定抗拉强度小于起吊旋转绳受力t的最大值或者剪切点螺栓允许剪切力小于旋点剪切力f的最大值,则依据起吊旋转绳的额定抗拉强度以及旋点允许剪切力,分别试算各种抱杆外露、倾角及牵引绳绑扎固定位置,直到满足起吊旋转绳的额定抗拉强度以及旋点允许剪切力,并在多种可行方案中择优选择,确保旋转吊装方案安全可行。
33.步骤(4)中公式中
“±”
值向上旋转为
“‑”
,向下旋转为“﹢”。
34.本发明的有益效果是:
35.该横担旋转吊装牵引力及旋转点剪切力的计算方法及应用,通过建立铁塔吊装平面坐标系统,根据旋转过程中的坐标变化及静力学受力模型,通过电算表格精准计算出铁塔横担旋转就位过程中牵引力及旋转点剪切力的变化,进而分析旋转角度对整个抱杆受力系统的影响,优化旋转吊装方案中对抱杆外露、倾角及牵引绳绑扎固定位置等参数的设置,从而方便快速的对整个抱杆受力系统进行安全校核,提高了吊装过程的安全性和可靠性。
附图说明
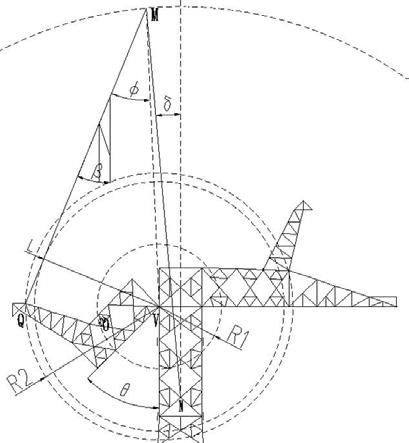
36.图1是本发明的向上旋转受力分析图;
37.图2是本发明的向下旋转受力分析图。
具体实施方式
38.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明
书所揭露的内容轻易地了解本发明的其他优点及功效。
39.本发明提供了横担旋转吊装牵引力及旋转点剪切力的计算方法及应用,如图 1和图2所示。
40.横担旋转吊装牵引力及旋转点剪切力的计算方法及应用,包括以下步骤:
41.(1)建立铁塔平面坐标系统,以铁塔底部中心为坐标原点,水平方向为x 轴,垂直方向为y轴,其中,
42.a、抱杆底部端n坐标为(xn,yn),旋转点v坐标为(xv,yv);
43.b、待吊构件初始垂直状态时θ=0
°
,重心o坐标为(xo,yo),初始起吊旋转绳绑扎受力点q坐标为(xq,yq);
44.c、抱杆长度为h,抱杆倾斜角为δ,吊装重量为g,旋转角度为θ;
45.(2)根据抱杆底部n坐标(xn,yn)和抱杆倾斜角δ,计算抱杆顶部m坐标(xm, ym);
46.(3)重心o点沿着半径r1的圆旋转,起吊旋转绳受力点沿着半径r2的圆旋转;
47.r1={(xo-xv)2+(yo-yv)2}
0.5
;
48.r2={(xq-xv)2+(yq-yv)2}
0.5
;
49.(4)根据吊件重心坐标o(xo,yo),初始起吊旋转绳受力点q坐标(xq,yq) 和旋转点v坐标(xv,yv),计算构件垂直状态时重心初始角度η和初始起吊旋转绳旋转初始角γ;
50.根据旋转角度θ的变化,计算重心o的旋转后坐标(xo',yo');
51.xo'=xo+{r1
×
sin(θ+η)-r1
×
sin(η)};
52.yo'=yo
±
{r1
×
cos(θ+η)-r1
×
cos(η)};
53.同理,计算旋转绳受力点q的旋转后坐标(xq',yq'):
54.xq'=xq+{r2
×
sin(θ+γ)-r2
×
sin(γ)};
55.yq'=yq
±
{r2
×
cos(θ+γ)
–
r2
×
cos(γ)}
56.公式中
“±”
值向上旋转为
“‑”
,向下旋转为“﹢”;
57.(5)利用旋转点v坐标(xv,yv),抱杆顶端m坐标(xm,ym),旋转绳受力点q'坐标(xq',yq'),计算vm长度s,∠q'mv角φ,并求力臂l=s
×
sin φ;
58.根据静力平衡求解起吊旋转绳受力t:
59.t=g
×
(xo'-xv)/l;
60.(6)根据平面三力汇交定理确定旋点剪切力方向,并通过q的旋转后坐标 (xq',yq')和抱杆顶部坐标(xm,ym),计算起吊滑车组轴线与铅垂线间的夹角β:
61.β=atan(|xq'-xm|/|yq'-ym|);
62.再通过平行四边形法则计算旋点剪切力f:
63.f=(g2+t
2-2
×g×
t
×
cosβ)
0.5
;
64.(7)提取起吊旋转绳受力t的最大值以及旋点剪切力f的最大值,论证旋转起吊方案是否可行,并选择最优抱杆外露、倾角及牵引绳绑扎固定位置。
65.步骤(1)中吊件重心坐标按形心考虑,采用分割法计算,且初始旋转角度θ满足抱杆顶部x坐标|xm|<旋转受力点x坐标|xq
′
|。
66.步骤(6)中若牵引绳受力变化较大,则根据最大β角及对应的牵引绳受力、最大牵引绳受力及对应的β角,两种工况分别计算整个主抱杆受力系统,校核计算是否满足受力要求,若牵引绳受力变化不大,则按最大β角校核,论证旋转起吊方案是否可行。
67.步骤(7)中,如若起吊旋转绳受力t的最大值小于起吊旋转绳的额定抗拉强度,且旋点剪切力f的最大值小于剪切点螺栓的允许剪切力,则旋转起吊方案可行;
68.如若起吊旋转绳的额定抗拉强度小于起吊旋转绳受力t的最大值或者剪切点螺栓允许剪切力小于旋点剪切力f的最大值,则依据起吊旋转绳的额定抗拉强度以及旋点允许剪切力,分别试算各种抱杆外露、倾角及牵引绳绑扎固定位置,直到满足起吊旋转绳的额定抗拉强度以及旋点允许剪切力,并在多种可行方案中择优选择,确保旋转吊装方案安全可行。
69.本发明提供的横担旋转吊装牵引力及旋转点剪切力的计算方法及应用能真实反映旋转吊装过程的受力情况,计算结果能用于分析旋转角度对整个抱杆受力系统的影响,优化旋转吊装方案中对抱杆外露、倾角及牵引绳绑扎固定位置等参数的设置,从而方便快速的对整个抱杆受力系统进行安全校核,提高了吊装过程的安全性和可靠性。
70.具体的,以
±
1100kv吉泉线z27103a1直线塔为例,采用750
×
750
×
34m 钢抱杆,抱杆底部高度61.7m;当,一侧中横担及地线支架重约5.16t,抱杆倾角 5
°
,需要注意的是:抱杆底部坐标,抱杆长度及倾角是为了计算抱杆顶部坐标;若已知抱杆顶部坐标可直接代入;而旋转角度θ,应保证抱杆顶部坐标xm<旋转受力点坐标xq',否则应删除该行,以表1为向上旋转受力计算结果。
71.依据向上旋转受力计算结果,可知旋转牵引绳受力最大值为2.48t,最大值时对应的旋转角度对35
°
,旋转牵引绳受力最小值为2.15t,最小值时对应的旋转角度对0
°
;而旋点剪切力最大值为3.17t,最大值时对应的旋转角度对75
°
,旋点剪切力最小值为2.94t,最小值时对应的旋转角度对20
°
;计算最大值后,可方便校核选择的牵引钢丝绳(受牵引力t)及螺栓(受剪切力f)是否满足要求;如若不满足可重新调整抱杆外露,倾角及起吊绳绑扎点位置,或者重新选择更大的旋转牵引绳和螺栓。
72.表1向上旋转受力分析
[0073][0074]
当,一侧中横担重约4.1t,抱杆倾角0
°
,以下表2为向下旋转受力计算结果如下:
[0075]
表2向下旋转受力分析
[0076][0077]
依据向下旋转受力计算结果,可知旋转牵引绳受力最大值为5.6t,最大值时对应的旋转角度对0
°
,旋转牵引绳受力最小值为2.22t,最小值时对应的旋转角度对90
°
;而旋点剪切力最大值为2.26t,最大值时对应的旋转角度对60
°
,旋点剪切力最小值为0.77t,最小值时对应的旋转角度对5
°
;计算最大值后,可方便校核选择的旋转牵引绳(受牵引力t)及螺栓(受剪切力f)是否满足要求;如若不满足可重新调整抱杆外露,倾角及起吊绳绑扎点位置,或者重新选择更大的旋转牵引绳和螺栓。
[0078]
该横担旋转吊装牵引力及旋转点剪切力的计算方法及应用,通过建立铁塔吊装平面坐标系统,根据旋转过程中的坐标变化及静力学受力模型,通过电算表格精准计算出铁塔横担旋转就位过程中牵引力及旋转点剪切力的变化,进而分析旋转角度对整个抱杆受力系统的影响,优化旋转吊装方案中对抱杆外露、倾角及牵引绳绑扎固定位置等参数的设置,从而方便快速的对整个抱杆受力系统进行安全校核,提高了吊装过程的安全性和可靠性。
[0079]
本专利中使用了“第一”、“第二”等词语来限定零部件的话,本领域技术人员应该知晓:“第一”、“第二”的使用仅仅是为了便于描述本发明和简化描述,上述词语并没有特殊的含义。
[0080]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的发明范围内。本发明要求保护范围由所附的权利要求书及等同物界定。
[0081]
在本发明的描述中,需要理解的是,术语“前”、“后”、“左”、“右”、“中心”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本发明和简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本发明保护内容的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1