一种点云处理方法、装置及电子设备与流程
本技术涉及数据处理,尤其涉及一种点云处理方法、装置及电子设备。
背景技术:
1、三维点云是由一系列大量的位置信息和与之相对应的属性信息(如颜色、反射率、法向量等)构成,能灵活地表征三维物体或场景的空间结构和表面属性。
2、目前,海量点云数据在编码和传输时面临较大压力,点云编码效率较低。
技术实现思路
1、本技术实施例提供一种点云处理方法、装置及电子设备,以解决现有点云编码效率较低的问题。
2、第一方面,本技术实施例提供了一种点云处理方法,包括:
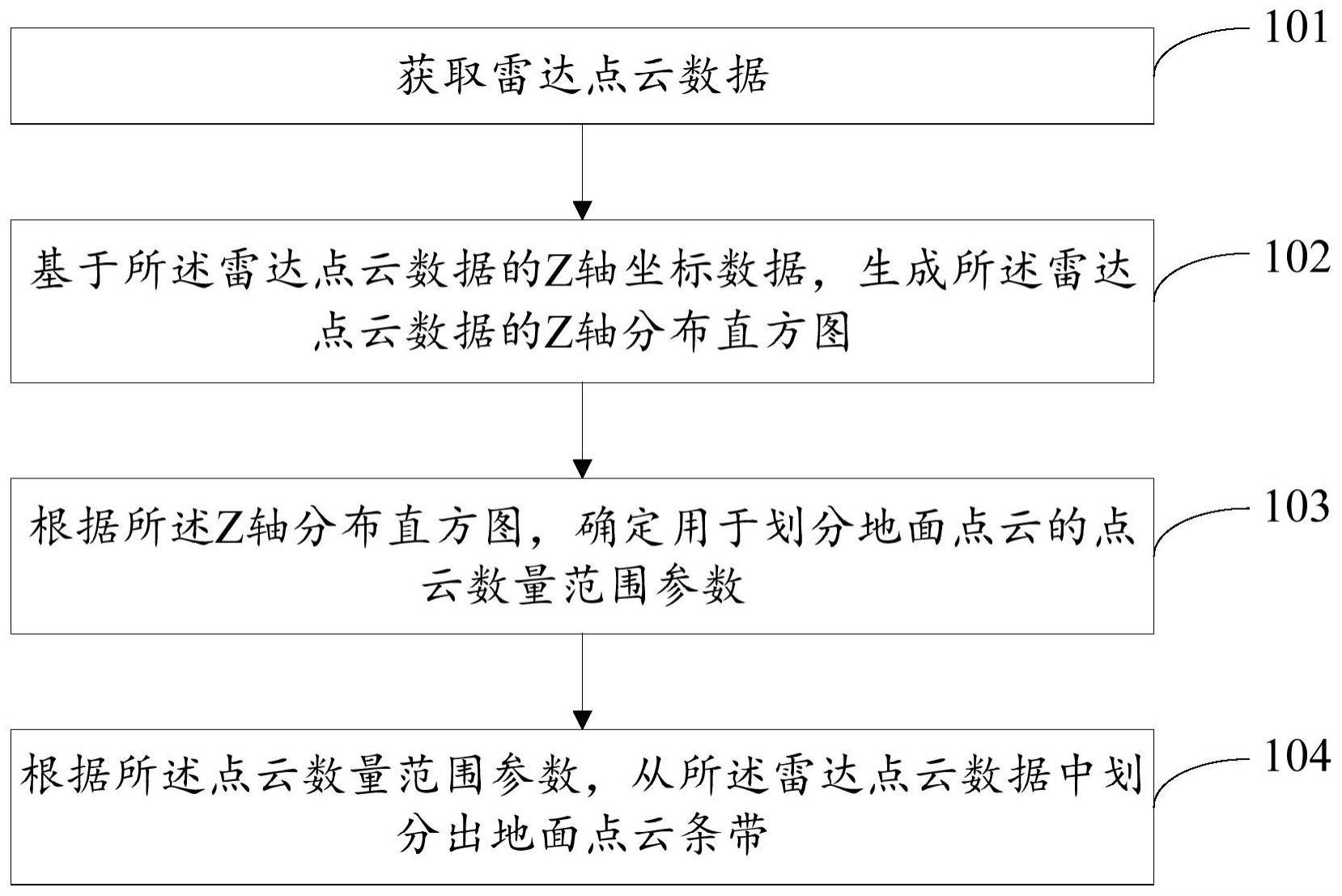
3、获取雷达点云数据;
4、基于所述雷达点云数据的z轴坐标数据,生成所述雷达点云数据的z轴分布直方图,其中,所述z轴分布直方图表示z轴坐标区间与点云数量的关系;
5、根据所述z轴分布直方图,确定用于划分地面点云的点云数量范围参数;
6、根据所述点云数量范围参数,从所述雷达点云数据中划分出地面点云条带。
7、可选地,所述根据所述z轴分布直方图,确定用于划分地面点云的点云数量范围参数,包括:
8、根据所述z轴分布直方图中的第一高峰值对应的第一z轴区间和第二高峰值对应的第二z轴区间,确定第三z轴区间,其中,所述第二高峰值小于所述第一高峰值,所述z轴区间为z轴坐标区间;
9、根据所述z轴分布直方图在所述第三z轴区间的第一低峰值,和所述第二高峰值,确定用于划分地面点云的点云数量范围参数。
10、可选地,所述第一高峰值为最高峰值,所述第二高峰值为次高峰值;
11、所述第三z轴区间的两个端点分别为所述第一z轴区间的端点和所述第二z轴区间的端点。
12、可选地,所述第一低峰值为所述z轴分布直方图中在所述第三z轴区间的最小点云数量。
13、可选地,所述根据所述z轴分布直方图在所述第三z轴区间的第一低峰值,和所述第二高峰值,确定用于划分地面点云的点云数量范围参数,包括:
14、将所述第一低峰值的m倍确定为用于划分地面点云的最小点云数量阈值,m为预设值,所述第一低峰值为所述z轴分布直方图在所述第三z轴区间的最低峰值;
15、将所述第二高峰值确定为用于划分地面点云的最大点云数量阈值。
16、可选地,所述点云数量范围参数包括最小点云数量阈值和最大点云数量阈值;
17、所述根据所述点云数量范围参数,从所述雷达点云数据中划分出地面点云条带,包括:
18、将所述z轴分布直方图中点云数量大于或等于所述最小点云数量阈值,且小于或等于所述最大点云数量阈值的z轴区间,确定为第一目标z轴区间;
19、将所述雷达点云数据中位于所述第一目标z轴区间的点云数据,划分为地面点云条带。
20、可选地,所述将所述雷达点云数据中位于所述第一目标z轴区间的点云数据,划分为地面点云条带之后,所述方法还包括:
21、将所述第一目标z轴区间划分为n个子区间,并将所述地面点云条带按所述n个子区间划分为n个地面点云子条带,其中,一个地面点云子条带对应位于一个子区间,n为大于1的整数。
22、可选地,所述生成所述雷达点云数据的z轴分布直方图之后,所述方法还包括:
23、根据所述z轴分布直方图中的最高峰值对应的z轴区间,确定用于划分第二类点云的第二目标z轴区间,其中,所述第二类点云为位于雷达附近的点云;
24、将所述雷达点云数据中位于所述第二目标z轴区间的点云数据,划分为第二类点云条带。
25、可选地,所述方法还包括:
26、将所述雷达点云数据中除所述地面点云和所述第二类点云之外的点云数据,划分为第三类点云条带。
27、第二方面,本技术实施例还提供一种点云处理装置,包括:
28、获取模块,用于获取雷达点云数据;
29、生成模块,用于基于所述雷达点云数据的z轴坐标数据,生成所述雷达点云数据的z轴分布直方图,其中,所述z轴分布直方图表示z轴坐标区间与点云数量的关系;
30、第一确定模块,用于根据所述z轴分布直方图,确定用于划分地面点云的点云数量范围参数;
31、第一划分模块,用于根据所述点云数量范围参数,从所述雷达点云数据中划分出地面点云条带。
32、可选地,所述第一确定模块包括:
33、第一确定子模块,用于根据所述z轴分布直方图中的第一高峰值对应的第一z轴区间和第二高峰值对应的第二z轴区间,确定第三z轴区间,其中,所述第二高峰值小于所述第一高峰值,所述z轴区间为z轴坐标区间;
34、第二确定子模块,用于根据所述z轴分布直方图在所述第三z轴区间的第一低峰值,和所述第二高峰值,确定用于划分地面点云的点云数量范围参数。
35、可选地,所述第一高峰值为最高峰值,所述第二高峰值为次高峰值;
36、所述第三z轴区间的两个端点分别为所述第一z轴区间的端点和所述第二z轴区间的端点。
37、可选地,所述第一低峰值为所述z轴分布直方图中在所述第三z轴区间的最小点云数量。
38、可选地,所述第二确定子模块包括:
39、第一确定单元,用于将所述第一低峰值的m倍确定为用于划分地面点云的最小点云数量阈值,m为预设值,所述第一低峰值为所述z轴分布直方图在所述第三z轴区间的最低峰值;
40、第二确定单元,用于将所述第二高峰值确定为用于划分地面点云的最大点云数量阈值。
41、可选地,所述点云数量范围参数包括最小点云数量阈值和最大点云数量阈值;
42、所述第一划分模块包括:
43、第三确定子模块,用于将所述z轴分布直方图中点云数量大于或等于所述最小点云数量阈值,且小于或等于所述最大点云数量阈值的z轴区间,确定为第一目标z轴区间;
44、第一划分子模块,用于将所述雷达点云数据中位于所述第一目标z轴区间的点云数据,划分为地面点云条带。
45、可选地,所述第一划分模块还包括:
46、第二划分子模块,用于将所述第一目标z轴区间划分为n个子区间,并将所述地面点云条带按所述n个子区间划分为n个地面点云子条带,其中,一个地面点云子条带对应位于一个子区间,n为大于1的整数。
47、可选地,所述点云处理装置还包括:
48、第二确定模块,用于根据所述z轴分布直方图中的最高峰值对应的z轴区间,确定用于划分第二类点云的第二目标z轴区间,其中,所述第二类点云为位于雷达附近的点云;
49、第二划分模块,用于将所述雷达点云数据中位于所述第二目标z轴区间的点云数据,划分为第二类点云条带。
50、可选地,所述点云处理装置还包括:
51、第三划分模块,用于将所述雷达点云数据中除所述地面点云和所述第二类点云之外的点云数据,划分为第三类点云条带。
52、第三方面,本技术实施例还提供一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的点云处理方法中的步骤。
53、第四方面,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上所述的点云处理方法中的步骤。
54、在本技术实施例中,获取雷达点云数据;基于所述雷达点云数据的z轴坐标数据,生成所述雷达点云数据的z轴分布直方图,其中,所述z轴分布直方图表示z轴坐标区间与点云数量的关系;根据所述z轴分布直方图,确定用于划分地面点云的点云数量范围参数;根据所述点云数量范围参数,从所述雷达点云数据中划分出地面点云条带。这样,通过基于雷达点云数据的z轴分布直方图,结合对雷达点云数据的本身几何特性分析,确定用于划分地面点云的点云数量范围参数,进而能够保证从雷达点云数据中合理划分出地面点云数据,提高点云编码效率。
- 还没有人留言评论。精彩留言会获得点赞!