一种基于仿真优化的自动代客泊车停车场布局优化方法
1.本发明公开一种基于仿真优化的自动代客泊车停车场布局优化方法,涉及城市交通规划与管理中停车设施设计的技术,属于计算、推算或计数的技术领域。
背景技术:
2.自动代客泊车是自动驾驶技术应用中的重要环节,自动代客泊车指自动驾驶车辆进入停车场完成停泊,并在车辆使用者发出指令时自动离开停车场的技术。自动代客泊车因可以节省车辆使用者的寻泊时间并提高车辆使用者的出行体验而受到广泛的关注。此外,由于自动驾驶汽车无人驾驶、互联互通的特性,自动代客泊车停车场可以采用更加集约的布局方式以提高停车空间的利用效率。
3.为了让停车场布局更加集约,以适应自动代客泊车的新技术,现有研究提出了多辆自动驾驶车首尾相接排放的布局模式,以增大停放区域在停车场空间中的占比。然而,在这种车辆首尾相接的布局模式下,部分自动驾驶车在出场时有一定概率会被其它自动驾驶车阻挡。为了协助被阻挡的自动驾驶车离开泊位,阻挡车辆需要首先离开当前泊位,到达临时停放地点进行停放,这一操作被称作“重定位”,这一操作必然会引起该自动驾驶车离开停车场的时间效率降低,并进而影响该停车场的时间效率。
4.为了在实现停车场集约化布局、提高停车场空间利用效率的同时,降低延误水平、提高停车场时间效率,现有研究对空间、时间效率的影响因素进行了研究,发现停车场布局、自动驾驶汽车的停放策略对时间、空间效率会产生一定影响。但是目前的研究,一部分仅聚焦于停车场的布局设计的优化,而没有考虑微观的自动驾驶汽车的停放策略,另一部分仅聚焦于自动驾驶汽车的停放策略,而没有考虑宏观的布局设计。因此,现有研究难以综合考虑布局设计与停放策略两个方面以提升自动代客泊车停车场的时间、空间效率。
5.综上所述,自动代客泊车停车场可以利用自动驾驶车互联互通的优势,进行更密集的布局设计,但是这种布局设计可能会带来时间上的损耗。现有研究难以综合停车场布局设计、自动驾驶车停放策略两个方面提升自动代客泊车停车场的时间、空间效率。因此,综合自动驾驶车停放策略的自动代客泊车停车场布局设计是当前自动代客泊车领域亟待解决的问题。
技术实现要素:
6.本发明的发明目的是针对上述背景技术的不足,提供一种基于仿真优化的自动代客泊车停车场布局优化方法,综合考虑自动代客泊车停车场布局设计和自动驾驶车停放策略,提出提升自动代客泊车停车场时间、空间效率的可靠方法,解决如何克服现有方法在提升自动代客泊车停车场时间、空间效率上的片面性的技术问题。
7.本发明为实现上述发明目的采用如下技术方案:
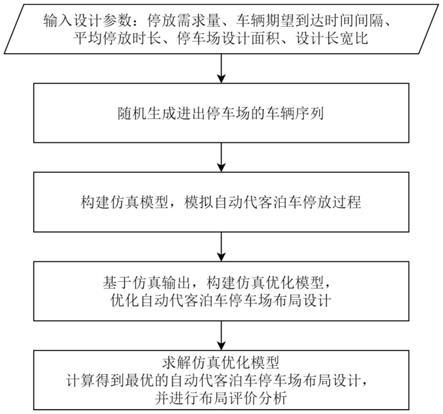
8.一种基于仿真优化的自动代客泊车停车场布局优化方法,包括以下步骤:
9.步骤1、设置自动代客泊车停车场的设计参数,包括该自动代客泊车停车场的设计
面积、自动代客泊车停车场设计长宽比、停放需求量、车辆期望到达时间间隔、车辆平均停放时长;
10.步骤2、根据步骤1设置的停放需求量、车辆期望到达时间间隔、车辆平均停放时长参数,生成车辆到达停车场的时间序列及车辆离开停车场的时间序列;
11.步骤3、根据步骤2生成的车辆到达、离开停车场的时间序列,基于k堆栈的自动代客泊车停车场布局模型,利用确定的车位分配策略、车辆离场策略和车辆重定位策略,构建自动代客泊车停车场的运行仿真模型,模拟停车场内自动驾驶停放的过程,并采集模拟停放产生的参数,包括重定位次数、拒绝入场次数;
12.步骤4、基于步骤3中仿真模型输出的参数,构建自动代客泊车停车场布局优化模型;
13.步骤5、利用混合遗传算法求解步骤4中构建的自动代客泊车停车场布局优化模型,计算得到步骤1给定设计参数下的最优布局方案。
14.进一步地,步骤2中,构建车辆到达停车场的时间序列及车辆离开停车场的时间序列的方法包括两部分:
15.第一部分,车辆到达停车场的时间序列是根据步骤1中设置的停放需求量、车辆期望到达时间间隔,基于负指数随机生成:
16.设停放需求量为d(单位:辆),车辆期望到达时间间隔为te(单位:分钟/辆),车辆的平均达到率为1/te(单位:辆/分钟),车辆的实际到达时间间隔t服从于参数为1/te的负指数分布,即根据t的概率生成d-1个随机数t2,t3,...,td,设置第一辆自动驾驶车到达停车场的时间为0,则第i辆车到达停车场的时间ti为
17.第二部分,车辆离开停车场的时间序列时根据步骤1中设置的停放需求量、车辆平均停放时长以及车辆到达停车场的时间序列生成:
18.设停放需求量为d(单位:辆),车辆平均停放时长为μe(单位:分钟/辆),车辆的平均离场率为1/μe,车辆实际停放时间m服从于参数为1/μe的负指数分布,即根据m的概率生成d个随机数μ1,μ2,...,μd,则第j辆车离开停车场的时间为tj+μj,(j∈[1,d])。
[0019]
进一步地,步骤3中的自动代客泊车停车场运行仿真模型,模型内容包括:k堆栈自动代客泊车停车场的基本布局、自动代客泊车停车场车位分配策略、自动驾驶车离场策略、车辆重定位策略、仿真过程参数采集。
[0020]
(1)k堆栈自动代客泊车停车场的基本布局是如下元素的组合:停车岛、停车堆栈、临时停放车道、通行车道、出/入车道。其中,停车岛指自动驾驶车集中停放的矩形区域,每个停车岛包含y个水平布置的停车堆栈,每个停车堆栈可以进行双向停放,每个方向至多有k辆车首尾相接堆叠停放。相邻的停车岛之间、停车岛与停车场竖直两侧边缘之间,存在t条临时停放车道及一条通行车道,临时停放车道和通行车道的宽度与泊位的宽度相同。同时,在停车场出入口处,存在一条水平布置的出/入车道。该自动代客泊车停车场的总长度为l米,总宽度为w米,每个泊位的长度为l米,宽度为w米。
[0021]
基于k堆栈自动代客泊车停车场的基本布局,可以构建一个停车场类layout来对停车场的布局进行描述,同时,该layout类也可以存储、更新停车场中车辆的到达、停放信
息,描述停车场当前各个泊位的占有状况。
[0022]
layout类包括如下成员变量、成员函数:
[0023]
表1.layout类的成员变量
[0024][0025][0026]
表2.layout类的成员函数
[0027][0028]
(2)自动代客泊车停车场的车位分配策略包括如下环节:
[0029]
首先,检测当前停车场中各个停车岛的中间列是否存在空泊位。若存在停车岛满足该条件,则将满足条件的停车岛中总泊位数最小的停车岛中间列中任意一个空泊位分配给入场车辆;
[0030]
然后,若当前停车场中各个停车岛的中间列不存在空泊位,则检测各个停车岛中和中间列水平距离为d个泊位的r列是否存在空泊位,若存在停车岛满足该条件,则将满足
条件的停车岛中总泊位数最小的停车岛r列中任意一个空泊位分配给入场车辆。d的起始值为1,若当前的d取值下不存在停车岛满足条件,则d=d+1。以此类推,直至停车场所有泊位均被占用。
[0031]
车辆离场和重定位策略包括如下环节:检测阻挡车较少的方向,并将其作为车辆离场方向;阻挡车辆进行重定位,转移到临时停放车道进行临时停放;需要离场的车辆从通行车道通过,利用出场车道完成离场。
[0032]
累计有n辆车阻挡离场车通行,需要被重定位时,重定位次数r1=m;有p辆车无法被分配到具体泊位时,拒绝入场参数r2=p。
[0033]
(3)基于k自动代客泊车停车场类layout以及车位分配策略、车辆离场和重定位策略,模拟自动代客泊车过程,并在仿真中收集参数r1和r2。该仿真的过程包括如下内容:
[0034]
首先,仿真的输入为车辆到达停车场、离开停车场的时间序列以及停车场类layout的对象layout。
[0035]
然后,遍历车辆到达停车场、离开停车场的时间序列,判断当前遍历到的车辆是到达车辆还是离去车辆。若为到达车辆,则执行车位分配策略,分配该车辆一个泊位,并对layout的island_info,arrival_info以及dwell_info变量进行更新。若为离去车辆,则执行车辆离场策略,让该车辆离开停车场,并对layout的island_info,arrival_info以及dwell_info变量进行更新。若车辆的离场方向有阻挡车辆,则执行车辆重定位策略,引导阻挡车到达临时停放车道进行临时停放,并对layout的tpark_info变量进行更新,与此同时,收集无法被分配泊位的车辆数量r2以及阻挡车的数量r1并在仿真结束时对所有r1加总、对所有r2加总并输出加总求和后的r1,r2。r1,r2表征了停车场的时间效率,停车场的空间效率使用停车场总面积和泊位总数的比值,即单泊位平均面积sa表示。
[0036]
步骤4利用仿真模型输出的参数r1,r2及自动代客泊车停车场自身属性,构建了自动代客泊车停车场布局优化模型:
[0037]
max u=((d-r2)/ts)
·
sa/(|s
c-sd|γ+r1+(f,1))#(1)
[0038]
s.t.
[0039]
g(e
p-1
(x
p
+1))+g(e
n+1-p
(x
p-1
+1))+g(e
g(1+(p-1)(n+1-p))
(x
p
+1)(x
p-1
+1))=1#(2)
[0040]
xi∈z,q
p
∈z#(3)
[0041]
xi∈x={x1,x2,...xn},q
p
∈q={q1,q2,...q
n+1
}#(4)
[0042]
xi>0,q
p
>0,1≤i≤n,1≤p≤n+1#(5)
[0043]
其中,u表征了停车场的时空综合效率;d表示停放需求量;ts表示停放(仿真)周期,根据车辆到达、离去时间序列获得;sa表示单泊位平均面积,即为停车场总面积和泊位总数的比值;sc表示当前布局下停车场的面积,利用get_size函数获得;sd表示停车场设计面积;γ为惩罚系数;f是一个较大数,表示不可行布局的惩罚值,若仿真中存在单一车辆离场的计算机模拟时间大于等于两分钟,则说明存在车辆在合理时间内难以完成出场,则仿真中的当前布局为不可行布局;为辅助函数;xi表示第i个停车岛中各停车堆栈包含的车位总数;x表示停车场内各停车岛包含的停车位数量;q
p
表示第p个间隔中的临时停放车道条数;q表示各相邻停车岛间隔中的临时停放车道条数;n表示停车岛的个数;z表示整数集;约束条件式(2)表示k堆栈的布局约束;
[0044]
约束条件式(3)至式(5)表示决策变量x和q的范围约束。
[0045]
步骤5利用一种混合遗传算法求解自动代客泊车停车场布局优化模型,该混合遗传算法的步骤为:
[0046]
(1)随机初始化决策变量x,q的种群,并进行二进制编码;
[0047]
(2)检测当前种群中各x,q个体的取值是否符合布局优化模型的约束条件,若不满足,则进行修复,修复的过程为:从当前个体二进制编码最后一位起,将0值变更为1,并检测变更后的个体是否满足约束条件,直到该二进制编码第一位已经变更完毕或者当前个体已经满足约束条件,之后仍然从当前个体二进制编码最后一位起,将1值变更为0,并检测变更后是否满足约束条件,若当前变更后不满足约束条件,则停止变更。基于x,q的种群中的每一个个体,生成layout类的对象;
[0048]
(3)从种群中随机选取nc个体进行染色体交叉,生成x,q的新个体;
[0049]
(4)根据变异概率μ选择变异基因进行变异,重复(2)和(3)的过程,并基于交叉、变异后的新个体生成layout的对象;
[0050]
(5)进行选择过程,首先,以各layout对象、车辆到达停车场的时间序列、车辆离开停车场的时间序列为输入,输出各个layout对象对应的r1,r2值,基于r1,r2值,计算各个layout对象对应的布局优化模型中目标函数值,以该目标函数值为遗传算法的个体适应度,利用俄罗斯轮盘赌算法进行选择;
[0051]
(6)进行局部搜索过程,在当前最优个体的邻域内进行搜索,选择满足约束条件的个体加入种群,最优个体的邻域指泊位总数和最优个体一致但是决策变量取值不同的个体组成的集合;
[0052]
(7)若达到了最大迭代次数,则停止计算,输出最优个体为最优布局方案,否则,返回(3)进行下一轮迭代。
[0053]
本发明采用上述技术方案,具有以下有益效果:本发明综合考虑自动驾驶车停放策略和自动代客泊车停车场布局设计,对自动代客泊车停车场的时间和空间效率进行提升。本发明利用仿真模拟自动驾驶汽车的停放策略,并得到时间、空间效率评价参数,并根据时间、空间效率的评价参数来对停车场布局进行优化,以此得到的停车场布局,可以实现时间、空间综合效率的最大化,在保证时间效率较高的前提下,大幅降低停车场的土地空间,提高空间效率。本发明适用于停放空间较为紧张的城市的自动驾驶车停车场设计,利用自动驾驶的特性解决城市停车空间紧张、泊位供给相对较少的问题。
附图说明
[0054]
图1为本发明的流程图。
[0055]
图2为具体实施例的最优布局图。
具体实施方式
[0056]
下面结合附图和具体实施例,进一步阐明本发明,应理解这些实例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
[0057]
如图1所示,一种基于仿真优化的自动代客泊车停车场布局优化方法,利用仿真优
化的方法计算求解给定设计参数下的最优停车场布局,该方法包括如下步骤:
[0058]
步骤1、设置自动代客泊车停车场的设计参数,包括该自动代客泊车停车场的设计面积、自动代客泊车停车场设计长宽比、停放需求量、车辆期望到达时间间隔、车辆平均停放时长。在本例中,设置停车场的设计面积为4800平方米,停车场设计长宽比为4:3,停放需求量为400辆,车辆期望到达时间间隔为1分钟,车辆平均停放时长为4小时。
[0059]
步骤2、根据步骤1设置的停放需求量、车辆期望到达时间间隔、车辆平均停放时长参数,基于泊松分布和负指数分布,生成车辆到达停车场的时间序列及车辆离开停车场的时间序列。
[0060]
步骤3、构建k堆栈自动代客泊车停车场类layout,包含了成员变量island_info,arrival_info,dwell_info,tpark_info,spot_size以及clearance_width,还包含了成员函数get_size,get_capacity以及plot_layout。此外,令spot_size的默认值为(2.5,5.0),令clearance_width的默认值为3.0。基于layout类的对象,构建了自动代客泊车仿真程序,包含:k堆栈自动代客泊车停车场类layout的对象layout,车位分配策略arrive函数,车辆离场策略、重定位策略depart函数。仿真程序遍历输入的车辆到达、离去时间序列,判断当前车辆是到达车辆还是离去车辆,若为到达车辆,则执行arrive函数,按照车位分配策略分配给其泊位,并更新layout类的对象layout所包含的成员变量值。若为离去车辆,则执行depart函数,执行车辆离场策略,若离场方向中存在阻挡车,则额外执行车辆重定位策略,将阻挡车引导至临时停放车道进行临时停放,并更新layout类的对象layout所包含的成员变量值,仿真结束后,输出无法被分配泊位的车辆总数以及阻挡车的总数量r1,r2。
[0061]
步骤4、利用仿真模型输出的参数r1,r2及自动代客泊车停车场自身属性,构建了自动代客泊车停车场布局优化模型:
[0062]
max u=((d-r2)/ts)
·
sa/(|s
c-sd|γ+r1+(f,1))#(1)
[0063]
s.t.
[0064]
g(e
p-1
(x
p
+1))+g(e
n+1-p
(x
p-1
+1))+g(e
g(1+(p-1)(n+1-p))
(x
p
+1)(x
p-1
+1))=1#(2)
[0065]
xi∈z,q
p
∈z#(3)
[0066]
xi∈x={x1,x2,...xn},q
p
∈q={q1,q2,...q
n+1
}#(4)
[0067]
xi>0,q
p
>0,1≤i≤n,1≤p≤n+1#(5)
[0068]
其中,x,q分别表示每个停车区域的堆栈大小/每个间隔中的临时停放车道条数,是本优化模型的决策变量;
[0069]
sa表示单泊位平均面积,即为停车场总面积和泊位总数的比值;
[0070]
ts表示停放(仿真)周期,根据车辆到达、离去时间序列获得;
[0071]
d表示总停放需求量,在本例中为400辆;
[0072]
sd表示停车场设计面积,在本例中为4800平方米;
[0073]
sc表示当前布局下停车场的面积,利用get_size函数获得;
[0074]
γ为惩罚系数;
[0075]
n表示停车岛的个数;
[0076]
xi表示第i个停车岛中每个堆栈的大小;
[0077]qp
表示第p个间隔中的临时停放车道条数。
[0078]
z表示整数集
[0079]
f是一个较大数,表示不可行布局的惩罚值,若仿真中存在单一车辆离场的计算机模拟时间大于等于两分钟,则说明存在车辆在合理时间内难以完成出场,则仿真中的当前布局为不可行布局;
[0080]
为辅助函数。
[0081]
约束条件式(2)表示k堆栈的布局约束;
[0082]
约束条件式(3)-(5)表示决策变量的范围约束。
[0083]
步骤5、利用一种混合遗传算法求解上述自动代客泊车停车场布局优化模型,求解过程包括:
[0084]
(1)随机初始化决策变量x,q的种群,并进行二进制编码;
[0085]
(2)检测当前种群中各x,q个体的取值是否符合布局优化模型的约束条件,若不满足,则进行修复,修复的过程为:从当前个体二进制编码最后一位起,将0值变更为1,并检测变更后是否满足约束条件,直到该二进制编码第一位已经变更完毕或者当前个体已经满足约束条件,之后仍然从当前个体二进制编码最后一位起,将1值变更为0,并检测变更后是否满足约束条件,若当前变更后不满足约束条件,则停止变更。基于x,q的种群中的每一个个体,生成layout类的对象;
[0086]
(3)从种群中随机选取nc个体进行染色体交叉,生成x,q的新个体;
[0087]
(4)根据变异概率μ选择变异基因,进行变异,重复(2)和(3)的过程,并基于交叉、变异后的新个体,生成layout的对象;
[0088]
(5)进行选择过程,首先,以各layout对象、车辆到达的时间序列、车辆离去的时间序列为输入,输出各个layout对象对应的r1,r2值,基于r1,r2值,计算各个layout对象对应的布局优化模型中目标函数值,以该目标函数值为遗传算法的个体适应度,利用俄罗斯轮盘赌算法进行选择;
[0089]
(6)进行局部搜索过程,在当前最优个体的邻域内进行搜索,选择满足约束条件的个体加入种群,最优个体的邻域指:泊位总数和最优个体一致,但是决策变量取值不同的个体组成的集合;
[0090]
(7)若达到了最大迭代次数,则停止计算,输出最优个体为最优布局方案,否则,返回(3)进行下一轮迭代。
[0091]
根据如上过程,计算得到的最优的自动代客泊车停车场布局如图2所示,图2中的虚线框表示自动代客泊车停车场的车位分配策略中检测的各停车岛中间列。根据步骤2生成多个不同的车辆到达、离去时间序列,将各个时间序列以及该最优自动代客泊车停车场布局输入仿真程序进行自动代客泊车仿真,对各时间序列下仿真输出的r1,r2求平均,得到的r1的平均值为7,r2的平均值为0,平均重定位率r1/d为0.0175。此外,该停车场的泊位总数为264个,单车位平均面积sa为17.69平方米。
[0092]
根据2015年国家住建部《城市停车设施建设指南》中的案例,南京中山路地下停车场单泊位面积为25平方米,武汉台北路智能停车场单泊位面积为39平方米。相较于当前的停车场,本方法设计的自动代客泊车停车场的单泊位面积更小、空间利用率更高,并且平均重定位率仅有0.0175次/车,重定位造成的时间损耗小。
[0093]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人
员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1