基于高光谱的树木种类识别方法、系统及存储介质与流程
1.本发明涉及树木识别技术领域,特别涉及基于高光谱的树木种类识别方法、系统及存储介质。
背景技术:
2.光谱是指复色光经过色散系统(如棱镜、光栅)分光后,被色散分离成的单色光,通过成像系统,投射在探测器上成为按波长(或频率)大小依次排列的图案。高光谱是一种可以捕获和分析一片空间区域内逐点上光谱的精细技术,由于可以检测到单个对象不同空间位置上的独特光谱“特征”,因此可以检测到在视觉上无法区分的物质。
3.目前,森林的树种统计仍在使用人工实地统计方法,通常是利用人工经验以及对树木的粗视特征进行鉴别,这种方法不仅十分耗费人力,而且容易因人为的主观因素产生结果偏差,除此之外,部分恶劣条件下,如原始森林、湿地等危险且条件恶劣的地区不具备人工采样的可行性。为了提高树木种类识别准确性,人们将高光谱技术应用在树种识别领域,通过拍摄并识别树木的光谱图像对树种进行分析,减小了因人为主观因素导致的树种识别偏差,但由于图像的采集仍然采用人工实地拍摄,导致其效率及可行性仍然偏低。
技术实现要素:
4.本发明提供了基于高光谱的树木种类识别方法、系统及存储介质,能够提升树木种类识别准确性、提升树种识别效率。
5.本发明提供的基础方案:
6.基于高光谱的树木种类识别方法,包括以下步骤:
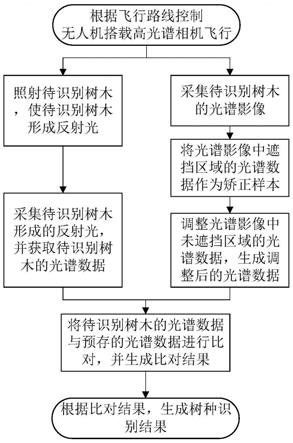
7.s100:采用无人机搭载高光谱相机采集待识别树木的光谱数据;
8.s200:将待识别树木的光谱数据与预存的光谱数据进行比对,并生成比对结果;
9.s300:根据比对结果,生成树种识别结果。
10.本发明的原理及优点在于:采用无人机搭载高光谱相机对待识别树木的光谱数据进行采集,相较于人工实地采集,其效率更高。采集完成后,将采集到的待识别树木的光谱数据与预存的各种树木的光谱数据比对,即可通过预存的光谱数据得知待识别树木的树种,相较于利用人工经验以及对树木的粗视特征进行鉴别,采用本方案,树种识别的准确性更高。综上,本方法能够提升树木种类识别准确性、提升树种识别效率。
11.进一步,s100中,采集并存储待识别树木的光谱数据、经纬度信息及时间戳。
12.有益效果:采集并存储待识别树木的经纬度信息,有利于对识别的树木进行定位,了解识别的每一棵树木的具体位置;采集并存储待识别树木的时间戳,有利于对光谱数据产生的时间进行认证,便于验证这段光谱数据在产生后是否经过篡改。
13.进一步,s100包括以下步骤:
14.s101:照射待识别树木,使待识别树木形成反射光;
15.s102:采集待识别树木形成的反射光,并获取待识别树木的光谱数据。
16.有益效果:夜晚没有太阳光时,通过光源照射待识别树木,使待识别树木形成反射光,有利于对待识别树木的光谱数据进行采集。
17.进一步,采用多波段光源照射待识别树木。
18.有益效果:采用多波段光源照射待识别树木,能够增加采集的光谱数据的准确性。
19.进一步,所述无人机上设有匀光板,所述匀光板用于反射太阳光,并遮挡高光谱相机的画幅,s100包括以下步骤:
20.s103:采集待识别树木的光谱影像,所述光谱影像包括遮挡区域和未遮挡区域;
21.s104:将光谱影像中遮挡区域的光谱数据作为矫正样本;
22.s105:根据所述矫正样本,调整光谱影像中未遮挡区域的光谱数据,生成调整后的光谱数据;
23.s200中,将调整后的光谱数据与预存的光谱数据进行比对。
24.有益效果:日光条件下,匀光板反射太阳光,并遮挡住高光谱相机的画幅,使高光谱相机拍摄到的光谱影像中,包含部分太阳光此时的真实光谱,也即遮挡区域的光谱数据为太阳光此时的真实光谱,将该部分的光谱数据作为矫正样本,对树木的光谱数据进行矫正,也即对其余未遮挡区域的光谱数据进行矫正,得到更加准确的待识别树木的光谱数据。所述调整后的光谱数据即待识别树木的光谱数据。
25.进一步,预存的光谱数据为树木在若干生长周期中的光谱数据。
26.有益效果:树木在各生长周期的光谱数据存在差异,故本方案中,存储树木在各生长周期的光谱数据,有利于提升树种识别的准确性。
27.进一步,所述无人机设有磁性件,所述高光谱相机设有磁铁,所述无人机与高光谱相机通过磁性件和磁铁可拆卸连接。
28.有益效果:利用磁铁吸附作用实现无人机与高光谱相机的可拆卸连接,与采用螺纹连接相比,安装及拆卸时更加方便快捷。
29.进一步,所述磁性件包括电源装置和电磁铁;
30.所述电源装置包括电源、导线和弹簧,所述电源活动设置于无人机上,所述导线通过弹簧与电源连接,所述弹簧处于未压缩状态时,弹簧与电源接触;
31.所述电磁铁包括线圈和铁芯;
32.所述线圈与导线连接。
33.有益效果:近年来,无人机坠机、爆炸等事故频繁发生,而搭载在无人机上的高光谱相机又价格昂贵,故本方案中,为了避免无人机发生事故时牵连高光谱相机,利用无人机与高光谱相机的可拆卸连接关系,使高光谱相机在无人机发生故障及时脱离无人机,实现高光谱相机的自保。
34.具体实现方式如下:将电源活动设置在无人机上,再将导线通过弹簧与电源连接,弹簧处于未压缩状态时,弹簧与电源接触,此时与电源装置连接的线圈处于通电状态,磁性件拥有磁性,无人机可通过磁性件实现与高光谱相机的连接。当无人机异常飞行,具有坠毁可能时,其倾斜会导致电源的移动,从而压缩电源正极或负极任一端连接的弹簧使得电源与另一端的弹簧脱离,导致电源装置处于断路状态,此时,与电源装置连接的线圈处于未通电状态,磁性件磁性消失,无人机与高光谱相机的连接作用消失,高光谱相机脱离无人机,避免了无人机的坠毁、爆炸等事故对高光谱相机造成损伤。
35.基于高光谱的树木种类识别系统,使用了上述基于高光谱的树木种类识别方法。
36.基于高光谱的树木种类识别存储介质,用于存储计算机可执行指令,所述计算机可执行指令在被执行时实现上述基于高光谱的树木种类识别方法。
附图说明
37.图1为本发明实施例基于高光谱的树木种类识别方法的流程图。
38.图2为本发明实施例基于高光谱的树木种类识别方法中无人机的结构示意图。
39.图3为本发明实施例基于高光谱的树木种类识别方法中无人机的磁性件示意图。
40.图4为本发明实施例基于高光谱的树木种类识别方法中无人机与高光谱相机的连接结构示意图。
41.图5为本发明实施例基于高光谱的树木种类识别方法中无人机的局部剖视图。
具体实施方式
42.下面通过具体实施方式进一步详细说明:
43.说明书附图中的标记包括:无人机1、电源2、导线3、弹簧4、线圈5、铁芯6、电源装置盒7、高光谱相机8、磁铁9、光源10、匀光板11、可伸缩机械结构12。
44.实施例1:
45.实施例1基本如附图1所示:
46.基于高光谱的树木种类识别方法,如图1所示,包括以下步骤(本方案中对各步骤的编号仅做步骤区分作用,不限制各步骤的具体执行顺序)。
47.s100:采用无人机1搭载高光谱相机8采集待识别树木的光谱数据,采集过程中,同时采集并存储待识别树木的经纬度信息及时间戳。如图2所示,所述无人机1上还设有匀光板11和光源10,所述匀光板11用于反射太阳光,并遮挡高光谱相机8的画幅,使高光谱相机8拍摄的光谱影像包括遮挡区域和未遮挡区域,所述遮挡区域的光谱数据为匀光板11反射的太阳光的光谱数据,未遮挡区域的光谱数据包括待识别树木的光谱数据。
48.所述匀光板11通过可伸缩机械结构12与无人机1连接,可伸缩机械结构12用于控制匀光板11的位置,需要使用匀光板11时,可伸缩机械结构12控制匀光板11下降,另其反射太阳光并遮挡部分高光谱相机8的画幅,不需要使用匀光板11时,可伸缩机械结构12控制匀光板11上升。本实施例中,所述可伸缩机械结构12为伸缩杆,光源10为多波段光源10。
49.在夜晚条件下对待识别树木的光谱数据进行采集时,外界光源10干扰少,此时通过多波段光源10向下照射标准的全波段光,可得到准确的光谱数据,且夜晚条件下,不使用匀光板,因为在光源为自身提供的条件下,光源的波长为已知条件,无需再对光谱进行测试。具体采用以下步骤。
50.s101:通过多波段光源10照射待识别树木,使待识别树木形成反射光。
51.s102:采集待识别树木形成的反射光,并获取待识别树木的光谱数据。
52.s200:将采集的待识别树木的光谱数据与预存的光谱数据进行比对,并生成比对结果。由于不同树木的光谱数据不同,故本方案中可以通过待识别树木的光谱数据与预存的各种类树木的光谱数据,得出待识别树木的种类。又因同种树木在生长过程中,不同生长周期的光谱数据也存在一定的差异,故本实施例中,预存的光谱数据为树木在多个生长周
期中的光谱数据,树木种类包括樟树、柏树和桦树,生长周期包括生长初期、生长盛期和生长末期。
53.s300:根据比对结果,生成树种识别结果。
54.在日光条件下对待识别树木的光谱数据进行采集时,可伸缩机械结构12下降,匀光板11伸出,多波段光源关闭,其原理在于,白天不用光源照射,因为光源相较于太阳光较弱,照射树木的光以太阳光为主。此时用匀光板反射部分,可以测得太阳的光谱。数据的采集具体包括以下步骤。
55.s103:可伸缩机械结构12控制匀光板11下降,另其反射太阳光并遮挡部分高光谱相机8的画幅,采集待识别树木的光谱影像。
56.s104:高光谱相机8拍摄的光谱影像包括遮挡区域和未遮挡区域,所述遮挡区域的光谱数据为匀光板11反射的太阳光的光谱数据,未遮挡区域的光谱数据包括待识别树木的光谱数据。将光谱影像中遮挡区域的光谱数据作为矫正样本。
57.s105:根据所述矫正样本,调整光谱影像中未遮挡区域的光谱数据,生成调整后的光谱数据。
58.s105具体包括以下步骤:
59.a:有匀光板遮挡的情况下拍摄的光谱影像中,应该包含一小部分匀光板画面,这部分光来自太阳光,称为矫正样本,另外一大部分为太阳光照射在森林上反射回来的画面,称为待识别树木的光谱数据。
60.b:拿到矫正样本,计算矫正样本的功率谱密度pa。
61.c:拿到待识别树木的光谱数据,计算待识别树木的光谱数据的功率谱密度pb。
62.d:此时pb应该低于pa,因为太阳光经过了森林树叶的漫反射和空气中物质导致的衰减后,强度变低。此时设计一个补偿系数n=ni*(pb/pa),这个ni为透光补偿,用于补偿可能因为雾,灰尘等情况引起的透过光的效率低的问题,计算方式为ni=1/a。式中,a是透光率。
63.e:最后将采集到的待识别树木的光谱数据b与计算得的补偿系数相乘后减去a,得到调整后的光谱数据。
64.s200:将待识别树木的光谱数据与预存的光谱数据进行比对,并生成比对结果。
65.s300:根据比对结果,生成树种识别结果。
66.基于高光谱的树木种类识别系统,使用了上述基于高光谱的树木种类识别方法。
67.基于高光谱的树木种类识别存储介质,用于存储计算机可执行指令,所述计算机可执行指令在被执行时实现上述基于高光谱的树木种类识别方法。
68.实施例2:
69.实施例2基本如附图3所示:
70.实施例2基本原理与实施例1相同,其区别在于实施例2中,所述无人机1设有磁性件,所述高光谱相机8设有磁铁9,如图4所示,所述无人机1与高光谱相机8通过磁性件和磁铁9可拆卸连接。本实施例中,为使无人机1与高光谱相机8的连接更为牢固,所述磁铁9采用强力磁铁9。
71.所述磁性件包括电源2装置和电磁铁9,所述电源2装置用于为电磁铁9供电,电磁铁9通电时,电磁铁9具有磁性,从而可以与高光谱相机8上的磁铁9相吸,连接无人机1与高
光谱相机8;电磁铁9断电时,电磁铁9的磁性消失,无法与高光谱相机8上的磁铁9相吸,连接在无人机1上的高光谱相机8脱落。采用本方案,与直接采用两磁铁9完成磁吸作用相比,其拆卸无需借助人为的外力,仅需通过电磁铁9的通断电即可控制无人机1与高光谱相机8的连接与脱离。本方案中,所述电磁铁9包括线圈5和铁芯6,具体的,由于硅钢材质容易磁化,又容易消失磁性,故本方案中所述铁芯6的材质采用硅钢。
72.如图5所示,图5为无人机1的局部剖视图,具体为电源装置盒7及其内部组件的剖视图。电源2装置包括电源2、导线3和弹簧4,所述电源2活动设置于无人机1上,所述导线3通过弹簧4与电源2连接,所述弹簧4处于未压缩状态时,弹簧4与电源2接触。本实施例中,所述电源2水平放置于电源装置盒7中,且可以在电源装置盒7中沿弹簧4的轴向运动,当无人机1正常飞行时,电源2的正极与负极分别与一个弹簧4接触,两弹簧4位于同一轴线上,且两弹簧4的另一头分别连接有导线3,所述导线3与线圈5连接,从而能够通过电源2装置给线圈5通电。
73.当无人机1正常飞行时,电源2在电源装置盒7中水平放置,弹簧4处于未压缩状态时,弹簧4与电源2接触,此时与电源2装置连接的线圈5处于通电状态,磁性件拥有磁性,无人机1可通过磁性件实现与高光谱相机8的连接。
74.当无人机1异常飞行,具有坠毁可能时,其倾斜会导致电源2在电源装置盒7中沿弹簧4的轴向移动,从而压缩电源2正极或负极任一端连接的弹簧4,使得电源2与另一端的弹簧4脱离,导致电源2装置处于断路状态,此时,与电源2装置连接的线圈5处于未通电状态,磁性件磁性消失,无人机1与高光谱相机8的连接作用消失,高光谱相机8脱离无人机1。由此,避免了无人机1的坠毁、爆炸等事故对高光谱相机8造成损伤。本实施例中,为充分保护高光谱相机8,还在高光谱相机8的外部设置有缓冲装置,所述缓冲装置可以为海绵、泡沫等,从而使得光谱相机脱离无人机1,落至地面时能够得到缓冲保护。
75.基于高光谱的树木种类识别系统,使用了上述基于高光谱的树木种类识别方法。
76.基于高光谱的树木种类识别存储介质,用于存储计算机可执行指令,所述计算机可执行指令在被执行时实现上述基于高光谱的树木种类识别方法。
77.以上的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1