一种适用于在轨服务爬壁机器人的软件架构系统
13.所述运维中心状态机含有5个基本状态,包括:
14.迫近航天器与着陆,用于描述所述在轨服务爬壁机器人未到目标航天器时的状态,在此状态,机器人抵近目标航天器并稳定着陆于目标航天器、与之建立稳定吸附,接着自动进入等待命令状态;
15.等待命令,用于描述机器人处于目标航天器上且在待机中,能接收外部传来的开始服务请求,也会自动实施机器人的自检与维护,进入系统运维状态;
16.系统运维,用于描述对机器人处于自动检测与维护中,分为运行情况检测与维护操作两个子状态,前者检测机器人各设备运行情况,后者根据检测的结果对机器人特定设备进行维护。
17.在轨服务,用于描述机器人处于在轨服务的过程中,进入该状态的前提是上一个状态必须是所述系统运维状态,以保证机器人能够以良好的状态进行在轨服务;
18.自主导航,用于描述机器人处于自主导航的过程中,进入该状态的前提是上一个状态必须是所述系统运维状态,以保证机器人能够以良好的状态进行自主导航,抵达待服务区域;
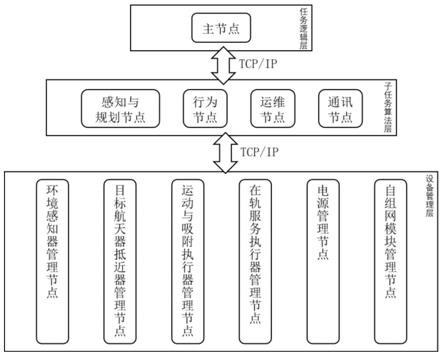
19.所述子任务算法层包含4类软件节点,分别为感知规划节点,行为节点,运维节点和通讯节点。
20.所述子任务算法层的每类软件节点是爬壁机器人在轨服务任务中相互独立的子任务的代码实现:在轨服务总体任务被拆分为4类相互独立的子任务,分别为感知规划任务、执行器控制任务、运维任务与通讯任务,这些子任务在所述子任务算法层的实现依次为所述感知规划节点,所述行为节点,所述运维节点和所述通讯节点。
21.所述子任务算法层各节点提供各类基于tcp/ip通信的服务,被主节点调用。
22.所述感知规划节点,用于机器人在目标航天器上的路径规划服务,所述服务从所述设备管理层的环境感知器管理节点获取环境传感信息来构建环境的数学模型,并利用环境模型生成机器人的最优行进轨迹,所述服务被所述主节点在所述自主导航状态调用。
23.所述行为节点,用于提供机器人各类执行器参与的服务,包括抵近与着陆目标航天器服务、航天器表面吸附移动服务与在轨服务服务,所述服务从所述设备管理层的目标航天器抵近器管理节点、运动与吸附执行器管理节点与在轨服务执行器管理节点获取机器人各类执行器的状态,利用执行器状态与对“抵近与着陆目标航天器”、“航天器表面吸附移动”与“在轨服务”等行为进行建模、规划与控制,所述服务被所述主节点分别在所述迫近航天器与着陆状态、所述自主导航状态、所述在轨服务状态调用。
24.所述运维节点,用于提供运维服务,所述服务会从所述设备管理层获取各机器人各设备的运行情况,如发生运行上的问题则会施行维护操作,直到机器人运行问题被修复,所述服务被所述主节点在所述系统运维状态调用。
25.所述通讯节点,用于提供通讯服务,分为接收服务于发送服务,所述接收服务与所述设备管理层的自组网模块管理节点通信,从同样搭载自组网模块的上位机接收数据,所述接收服务被所述主节点在所述等待命令状态调用,所述发送服务于所述设备管理层的自组网模块管理节点通信,向同样搭载自组网模块的上位机发送数据,所述发送服务被所述主节点调用。
26.所述的设备管理层包含6类软件节点,分别为环境感知器管理节点、目标航天器抵
近器管理节点、吸附运动执行器管理节点,在轨服务执行器管理节点、电源分配单元管理节点、自组网模块管理节点,所述各类管理节点解析在轨服务爬壁机器人各相应设备搭载的微处理器与机器人主控芯片之间的通讯协议,实现对底层各设备的读/ 写。
27.所述设备管理层的每个节点具有相同的结构,对遥测信号的读、对上层命令的写根据机器人各设备的微处理器与机器人主控芯片的通信协议决定。
28.本发明的有益效果如下:
29.1.本发明系统的给出一种适用于在轨服务爬壁机器人的分层式软件架构,结构紧凑,实用性强。
30.2.本发明所提出的软件架构从顶层看,充分考虑了在轨服务任务的特殊性,特别是任务的安全稳定性需求,提出的运维中心状态机,有着良好的鲁棒性,能很大程度保证在轨服务爬壁机器人在被服务航天器上安全稳定的工作。
31.3.本发明所提出的软件架构从底层看,给出了管理在轨服务爬壁机器人各设备的方案,具有一定的通用性。
附图说明
32.图1为在轨服务爬壁机器人的软件架构总体设计示意图;
33.图2为子任务算法层的运维中心状态机示意图;
34.图3为设备管理层的任意设备管理节点的程序原理示意图;
35.图4为具体实施方案中的轨服务爬壁机器人的示意图;
36.图5为具体实施方案中轨服务爬壁机器人的软件架构总体设计示意图;
37.图6为具体实施方案中运维中心状态机的示意图;
38.图7为具体实施方案中感知规划节点中感知规划算法示意图;
39.图8为具体实施方案中运维节点中运维算法示意图;
40.图9为基于ros的通信架构图。
具体实施方式
41.下文中,结合附图和实施例对本发明作进一步阐述。
42.实施例一:
43.本发明提供了一种适用于在轨服务爬壁机器人的软件架构系统,采用分层式软件架构,如图1所示,从顶层到底层依次包括:
44.任务逻辑层,用于将爬壁机器人进在轨服务的总体流程组织成安全、自动化的任务逻辑,与子任务算法层通信,在任务逻辑的不同状态调用子任务算法层的相应算法;
45.子任务算法层,用于存放爬壁机器人进在轨服务所需求的各种节点,与设备管理层通信,获取机器人各设备的传感信息,发送各类控制指令;
46.设备管理层,用于解析在轨服务爬壁机器人各设备搭载的微处理器与机器人主控芯片之间的通讯协议、实现上层控制节点对底层各单机搭载的微处理器的读/写、进而实现对机器人各设备的有效控制。
47.所述任务逻辑层仅与所述子任务算法层通信,协议为tcp/ip;所述子任务算法层与所述设备管理层的的通信协议为tcp/ip。
48.所述任务逻辑层含有一个主节点,所述主节点将爬壁机器人在轨服务编程为一个充分考虑在轨服务安全进行的运维中心状态机,如图2所示。“运维中心状态机”的总体逻辑可以概括为:“机器人必须在良好的运行情况下才能执行任务,否则,必须进行一系列维护操作改善系统状态。”49.所述设备管理层的每个节点具有相同的结构,如图3所示,对遥测信号的读、对上层命令的写根据机器人各设备的微处理器与机器人主控芯片的通信协议决定。
50.实施例二:
51.本发明还提供了一种在轨服务爬壁机器人,如图4所示,该机器人执行的在轨服务为航天器表面故障检测。所述机器人的硬件部分包括:
52.机器人主控芯片及扩展板1,配有1个usb3.0接口和4个uart串口,用于和机器人各类硬件单机通信;
53.环境感知器,为一个深度相机2,内置imu单元,能获取环境的深度图、点云以及自身的角速度,以usb3.0方式与机器人主控芯片通信,;
54.航天器抵近器,由安装在机器人底部的绳系机构6与驱动板9组成。6机构能将自带的捕获头弹射至目标航天器上,让机器人与目标航天器建立绳系连接,再通过收绳使机器人抵近并着陆于航天器上,驱动板内置微处理器以uart与机器人主控芯片通信;
55.服务执行器(吸附运动执行器),由18个总线舵机4串联构成的6条腿足和足端上安装的静电吸附膜5组成,左右对称分布,该机构能使机器人在航天器表面吸附爬行,其搭载的微处理器用以uart与机器人主控芯片通信,在本实例中,吸附运动执行器等同于服务执行器,故两者占有一个uart串口;
56.电源分配单元与其他设备,包含电源分配单元8、蓄电池7、太阳能电池阵列12与led 照明灯3,电源分配单元与电源设备与供电设备连接和用电设备连接,内置微处理器能控制机器人各需电设备的供电,以uart串口与机器人主控芯片通信;
57.自组网模块:为一个空中端自组网模块10,能接收60公里内配对的地面端模块传输的信息。内置微处理器以uart与机器人主控芯片通信。
58.结合实例机器人,可以应用本发明提供的“适用于在轨服务爬壁机器人的软件架构”,图5 是本发明在实例机器人的具体实施,主要体现在以下方面
59.1.本发明所述任务逻辑层,主节点内的“运维中心”状态机根据实例的任务需求可以具体实施为如图6所示的状态机。如图6所示,
①
状态根据实例机器人情况被细分为3个子状态,分别为建立绳系连接、收绳与姿态调整和着陆,适用于实例机器人中基于绳系结构的航天器抵近器。进一步的,由于实例机器人执行的是航天器表面故障检测的任务,在执行任务时机器人就需要在航天器表面进行智能自主的移动导航,故在轨服务状态与自主导航状态功能重合,合并为一个状态。在此状态下,机器人在航天器表面自主导航的同时对深度相机采集到的航天器表面图片进行分析,检查是否存在故障。
60.2.本发明所述任务逻辑层与子任务算法层的通信、所述子任务算法层与设备管理层的通信由机器人操作系统(ros维护)。任务逻辑层、子任务算法层与设备管理层的每个节点都被设计成ros节点,以(基于tcp/ip的)ros主题(rostopic)或者ros服务(rosservice) 的与其他层的节点通信。其中主节点与子任务算法层各节点通过rosservice通信,子任务算法层各节点与设备管理层各节点以rostopic形式通信。
61.3.本发明所述子任务算法层中各节点针对实例机器人的具体实施如下:
62.感知规划节点与主节点与深度相机管理节点通讯。提供机器人在航天器上的路径规划 ros服务。此ros服务由主节点订阅,从设备管理层的深度相机管理节点获取深度图、imu 信息、点云、rgb图来构建环境的数学模型,并利用环境模型与导航目标点生成机器人的最优行进轨迹,内部算法流程如图7所示。
63.行为节点与主节点与深度相机管理节点、绳系机构管理节点,舵机与静电吸附装置管理节点通信。提供机器人各类执行器参与的服务,包括“抵近目标航天器”(含有释放捕获器、收绳与姿态调整,着陆三个步骤)、“航天器表面故障检测”服务。服务被主节点调用,服务需要的信息从设备管理层的深度相机管理节点、绳系机构管理节点,与舵机与静电吸附装置管理节点获取。
64.运维节点在该实例中与主节点与电源管理节点通信。其提供的运维服务在该实例的具体实施为电池电量的控制,流程图如图8所示。该服务会在电池压小于下限电压v
l
时通过设备管理层各节点让机器人进入静息模式,具体体现在通过电源管理节点切断led照明、舵机、深度相机、自组网模块的供电,尽可能减少蓄电池消耗,等待太阳能电池阵列为蓄电池充电。需要注意的是,在静息模式下机器人仍然需要对静电吸附膜供电,防止机器人滑落目标航天器。每过一段时间机器人都会检测蓄电池电压是否大于上限电压vh,如是,则结束服务,如否,则维持静息模式。此服务将机器人的电池电压控制在v
l
~vh之间,在本实例中,v
l
=7v, vh=8.4v。
65.通讯节点与主节点与自组网模块管理节点通信。包含通讯服务。在本实例中,通讯服务分为两部分,其一为与地面端沟通,获取地面端对机器人的命令;其二是向地面端发送航天器表面故障检测数据。
66.综上所述,子任务算法层以ros service的形式与主节点通信、以ros topic的形式与设备管理层的各节点通信,基于ros的通信架构如图9所示,在图中,client与server表示 rosservice形式的通信,主节点通过client调用子任务算法层的各类server所表示的服务; publisher于subscriber表示rostopic形式的通信,publisher会向一个主题发布信息,而 subscriber会接收主题上的信息;表1列出了主节点与子任务算法层的各类ros服务。
67.表1主节点与子任务算法层的各类ros服务
[0068][0069]
表2列出了子任务算法层与设备管理层的各类ros主题。
[0070]
表2子任务算法层与设备管理层的各类ros主题
[0071]
[0072][0073]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1