特种救援车辆转向模式智能决策方法与流程
1.本发明涉及车辆转向技术领域,特别是属于一种特种救援车辆转向模式智能决策方法。
背景技术:
2.近年来,地震、泥石流、火灾等各类灾害频发,作为一种对各类灾害进行紧急救援的专用车辆,特种救援车辆的研制成为了我国发展的重大需求。然而,地震区、城中村等救援场景往往具有地形复杂和救援空间狭小的特点,传统的前轮转向特种救援车辆转向半径较大,无法快速通过狭小复杂救援场景,导致错失救援的最佳时机。多模式转向技术能够赋予特种救援车辆前轮转向、后轮转向、蟹行转向、四轮转向和原地转向等多种转向模式,能够有效减小特种救援车辆转向对空间的需求,有助于快速通过狭小复杂地域。因此,开展特种救援车辆多模式转向技术研究十分关键。
3.如何根据不同驾驶工况选择合适的转向模式是多模式转向技术亟需解决的关键问题。然而,当前对于多模式转向车辆处于何种转向模式本质上是通过司机凭借主观经验和驾驶技巧进行人为决策,并没有形成基于车辆环境和状态信息的转向模式智能决策体系,无法保证转向模式在不同狭小复杂地域下是最合适的,增加了车辆转向时间和难度,降低了特种救援车辆的机动能力和智能化水平。因此,急需构建转向模式智能决策模型,自适应获取狭小复杂地域下特种救援车辆最优转向模式。
技术实现要素:
4.本发明的目的即在于提供一种特种救援车辆转向模式智能决策方法,以达到自适应获取狭小复杂地域下特种救援车辆的最优转向模式,从而提高特种救援车辆在狭小复杂地域下的机动能力和智能化水平的目的。
5.本发明所提供的特种救援车辆转向模式智能决策方法,其特征在于,包括以下步骤:
6.a.构建基于卷积神经网络的转向模式决策模型:
7.a1.构建基于卷积神经网络的转向模式决策模型的转向模式评价指标;
8.a2.建立实验测试平台和仿真测试平台;
9.a3.通过实验测试平台和仿真测试平台构建转向模式决策的混合样本集;
10.a4.通过混合样本集数据训练卷积神经网络模型,建立基于卷积神经网络的转向模式决策模型;
11.b.基于卷积神经网络的转向模式决策模型的输入和输出;
12.特种救援车辆的工况信息输入基于卷积神经网络的转向模式决策模型后,经基于卷积神经网络的转向模式决策模型输出特种救援车辆的最优转向模式。
13.进一步的,在步骤a1中,转向模式评价指标为特种救援车辆转向模式的总评价指标值,所述的总评价指标值sm通过以下公式计算:
[0014][0015]
式中:m=fws,rws,4ws,cs,zrt;分别代表特种救援车辆的前轮转向模式、后轮转向模式、四轮转向模式、蟹行转向模式和原地转向模式;tm代表m转向模式下特种救援车辆通过狭小复杂地域的行驶时间;jm代表m转向模式下特种救援车辆的能量消耗,包括轮胎磨损能耗、转向执行器能量消耗和控制器能量消耗;分别代表转向模式评价指标经过单位量纲处理后的权重系数,其中,
[0016]
进一步的,在步骤a3中,通过多名经验丰富的司机在多种狭小复杂地域下操纵特种救援车辆,采集输入卷积神经网络模型的特种救援车辆的工况信息,并分别计算比较不同转向模式下的sm值,标记sm最小时特种救援车辆的最优转向模式m,建立基于卷积神经网络的转向模式决策模型的样本集。
[0017]
进一步的,在步骤a3中,通过实验测试平台构建少量工况数据集,并基于自动驾驶仿真测试平台autoware采集大量工况数据集,建立基于卷积神经网络的转向模式决策模型在实验测试和仿真测试联合下的多工况混合样本集。
[0018]
进一步的,在步骤b中,特种救援车辆的工况信息包括基于视觉传感器的图像数据、基于激光雷达的点云数据和车辆存储能量数据,其中,图像数据和点云数据用于感知特种救援车辆所处狭小复杂地域中的环境信息。
[0019]
本发明所提供的特种救援车辆转向模式智能决策方法,以图像数据、点云数据和车辆存储能量值为特种救援车辆转向模式智能决策模型的输入信息,经训练后的基于卷积神经网络的转向模式决策模型,能够自适应获取特种救援车辆在狭小复杂地域中的最优转向模式。本发明克服了传统人为决策转向模式的局限性,能够自适应并决策不同的狭小复杂救援场景下特种救援车辆的最优转向模式,具有提高特种救援车辆在狭小复杂地域中的智能化水平和机动能力的积极效果。
附图说明
[0020]
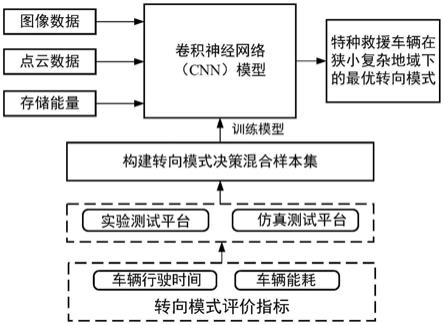
图1为本发明的原理图。
具体实施方式
[0021]
如图1所示,本发明所提供的特种救援车辆转向模式智能决策方法,在构建基于卷积神经网络的转向模式决策模型的基础上,将特种救援车辆的工况信息输入基于卷积神经网络的转向模式决策模型,经基于卷积神经网络的转向模式决策模型输出特种救援车辆的最优转向模式。
[0022]
本发明的具体实现过程如下:
[0023]
首先,构建基于卷积神经网络的转向模式决策模型的转向模式评价指标,转向模式评价指标为特种救援车辆转向模式的总评价指标值,上述总评价指标值sm通过以下公式计算:
[0024][0025]
式中:m=fws,rws,4ws,cs,zrt;分别代表特种救援车辆的前轮转向模式、后轮转向模式、四轮转向模式、蟹行转向模式和原地转向模式;tm代表m转向模式下特种救援车辆
通过狭小复杂地域的行驶时间;jm代表m转向模式下特种救援车辆的能量消耗,包括轮胎磨损能耗、转向执行器能量消耗和控制器能量消耗;分别代表转向模式评价指标经过单位量纲处理后的权重系数,其中
[0026]
建立实验测试平台和仿真测试平台,并通过实验测试平台和仿真测试平台构建转向模式决策的混合样本集。具体地,通过多名经验丰富的司机在多种狭小复杂地域下操纵特种救援车辆,采集输入卷积神经网络模型的特种救援车辆的工况信息,并分别计算比较不同转向模式下的sm值,标记sm最小时特种救援车辆的最优转向模式m。通过实验测试平台构建少量工况数据集,并基于自动驾驶仿真测试平台autoware采集大量工况数据集,建立基于卷积神经网络的转向模式决策模型在实验测试和仿真测试联合下的多工况混合样本集。
[0027]
通过实验测试平台和仿真测试平台,利用混合样本集数据训练卷积神经网络模型,从而建立基于卷积神经网络的转向模式决策模型。
[0028]
基于卷积神经网络的转向模式决策模型的输入和输出。具体地,将包含特种救援车辆的基于视觉传感器的图像数据、基于激光雷达的点云数据和车辆存储能量数据的工况信息输入所建立的基于卷积神经网络的转向模式决策模型中,其中,图像数据和点云数据用于感知特种救援车辆所处狭小复杂地域下的环境信息。经转向模式决策模型后输出特种救援车辆的最优转向模式,如输出对特种救援车辆前轮转向、后轮转向和四轮转向等不同转向模式的决策信息。
[0029]
下面,通过本发明的一个具体实施例,对本发明做进一步的描述说明。
[0030]
以自主研制的消防救援车辆为具体案例,本案例中的消防救援车辆具备前轮转向、后轮转向和四轮转向等三种转向模式,通过本发明所提供的特种救援车辆转向模式智能决策方法,对其三种转向模式进行智能决策,从而获得不同狭小复杂救援工况下消防救援车辆的最优转向模式。
[0031]
首先,以通过狭小复杂地域的行驶时间、不同转向模式下消防救援车辆的能量消耗等参数,构建消防救援车辆转向模式的总评价指标值在本实施例中,为了提高消防救援车辆在狭小复杂地形下机动能力,加大评价指标tm的权重,因此设定以城中村、步行街等典型的狭小复杂的地域为样本集所要采集的灭火救援场地,通过自主研制的消防救援车辆进行实验测试,将包含特种救援车辆的基于视觉传感器的图像数据、基于激光雷达的点云数据和车辆存储能量数据的工况信息输入所建立的基于卷积神经网络的转向模式决策模型中,分别计算比较不同转向模式下的sm值,标记sm最小时消防救援车辆的最优转向模式m,建立基于卷积神经网络的转向模式决策模型的样本集。而后通过实验测试平台构建少量工况数据集,并基于自动驾驶仿真测试平台autoware采集大量工况数据集,建立基于卷积神经网络的转向模式决策模型在实验测试和仿真测试联合下的多工况混合样本集。通过实验测试平台和仿真测试平台,数据训练所建立的基于卷积神经网络的转向模式决策模型,由此,将包含特种救援车辆的基于视觉传感器的图像数据、基于激光雷达的点云数据和车辆存储能量数据的工况信息输入所建立的基于卷积神经网络的转向模式决策模型中,即可实现对消防救援车辆前轮转向、后轮转向和四轮转向等三种转向模式的智能决策的输出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1